基于图像语义分割和视角缩放的机动车拥堵长度计算方法与流程
本发明涉及智慧交通,具体涉及一种基于图像语义分割和视角缩放的机动车拥堵长度计算方法。
背景技术:
1、随着深度学习的兴起,特别是卷积神经网络的发展,语义分割技术取得了显著的进展,它旨在将图像中的每个像素分配给特定的语义类别。语义分割技术的发展使得计算机视觉技术在交通、农业、医疗等领域发挥了重要作用,提高了人们的工作效率。
2、日趋增加的机动车数量增加了城市道路的拥堵情况。伴随城市化进程的推进,智慧城市建设这一理念被提出。在智慧交通场景中,需要判断车辆的行驶状态并合理控制交通信号灯等设施的运作。为了检测车辆的运行状态,基于外部传感器的方法、基于车载gps的方法、基于视频的方法被使用。基于外部传感器的方法根据地磁线圈、微波等数据检测车流情况,受环境影响较大、检测条件苛刻。基于车载gps的方法在数据处理中计算量巨大,不适合实际场景中的广泛部署。在监控摄像头的覆盖范围和清晰度不断提升以及计算机视觉技术的不断发展的状态下,经过科学性和可行性的分析,通过监控摄像头记录交通状态是智慧交通场景下的首选方法。
3、目前多数的车辆拥堵检测方法是通过深度学习算法和计算机视觉算法来获取视频中的车辆流量信息,通过车辆速度、车辆密度等参数来估算车辆的拥堵状态。然而,车辆流量信息忽视了车辆之间的差异性,并且不能直观的描述路段的拥堵情况。
技术实现思路
1、本发明为了克服以上技术的不足,提供了一种准确计算拥堵时段机动车排队长度的方法。
2、本发明克服其技术问题所采用的技术方案是:
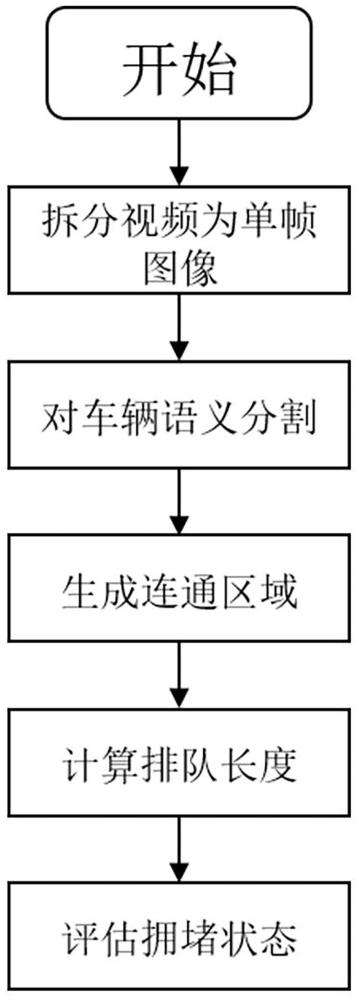
3、一种基于图像语义分割和视角缩放的机动车拥堵长度计算方法,包括如下步骤:
4、(a)获取路口电警摄像头的视频流信息,将视频进行分帧处理,得到帧路口道路图像的图像集,,为第帧路口道路图像,;
5、(b)将第帧路口道路图像中包含对向车道区域进行截取,得到剪裁后的第帧路口道路图像,得到所需区域图像集;
6、(c)对剪裁后的第帧路口道路图像进行机动车区域划分,得到二值图像;
7、(d)标注出剪裁后的第帧路口道路图像中的车道线,构建二值图像;
8、(e)根据二值图像和二值图像得到个在相应车道线上的机动车连通区域,第个机动车连通区域为;
9、(f)计算剪裁后的第帧路口道路图像的车道的近端停车线的中点与车道的远端停车线的中点之间的像素距离,人工测量该路口近端停车线和远端停车线对应的真实路宽及近端停车线与远端停车线之间的真实距离;
10、(g)根据像素距离、真实路宽、真实距离计算得到排队长度;
11、(h)根据排队长度计算拥堵状态参数,根据拥堵状态参数判断拥堵状态。
12、进一步的,步骤(a)中通过onvif协议获取路口电警摄像头的视频流信息。
13、进一步的,步骤(c)包括如下步骤:
14、(c-1)使用python中的cv2.equalizehist函数对第帧路口道路图像进行对比度增强处理,得到增强后的路口道路图像;
15、(c-2)使用python中的cv2.gaussianblur函数对增强后的路口道路图像进行高斯模糊,得到预处理后的路口道路图像;
16、(c-3)使用python中的cv2.resize函数改变路口道路图像的大小,得到大小符合segformer语义分割模型输入要求的路口道路图像;
17、(c-4)将路口道路图像输入到segformer语义分割模型中进行机动车区域划分,输出得到包含若干机动车区域的分割掩码图;
18、(c-5)使用python中的cv2.threshold函数对分割掩码图进行二值化处理,得到二值图像,二值图像的背景颜色为黑色,其机动车区域的颜色为白色。
19、进一步的,步骤(d)包括如下步骤:
20、(d-1)人工标注剪裁后的第帧路口道路图像中的车道线;
21、(d-2)将剪裁后的第帧路口道路图像中车道线上的像素点的像素值设置为1,将车道线外的像素点的像素值设置为0,得到二值图像。
22、进一步的,步骤(e)中使用python中的cv2.bitwise_and函数对二值图像的白色像素区域和二值图像的白色像素区域取交集,得到个在相应车道线上的机动车连通区域。
23、进一步的,步骤(f)包括如下步骤:
24、(f-1)剪裁后的第帧路口道路图像的车道下方的停车线为近端停车线,其上方的停车线为远端停车线,人工标定近端停车线的长度为,人工标定远端停车线的长度为,近端停车线的中点横坐标为,其纵坐标为,远端停车线的中点横坐标为,其纵坐标为;
25、(f-2)通过公式计算得到中点之间的像素距离。
26、进一步的,步骤(g)包括如下步骤:
27、(g-1)通过公式计算得到系数,通过公式计算得到系数;
28、(g-2)通过公式计算得到排队长度,式中为第个机动车连通区域的中点的横坐标,为第个机动车连通区域左下角的像素点与其右上角的像素点之间的直线段,为直线段的长度值,为像素距离所在直线的斜率,为线段的斜率。
29、进一步的,步骤(h)包括如下步骤:
30、(h-1)通过公式计算得到拥堵状态参数;
31、(h-2)当时,判定为路口正常,当时,判定为路口轻度拥堵,当时,判定为路口拥堵,当时,判定为路口严重拥堵。
32、本发明的有益效果是:在城市拥堵路口的电警监控视频中,通过车辆语义分割方法、连通区域划分方法和拥堵长度建模,可以准确估算拥堵时段机动车排队长度,进而评估拥堵状况。
技术特征:
1.一种基于图像语义分割和视角缩放的机动车拥堵长度计算方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于图像语义分割和视角缩放的机动车拥堵长度计算方法,其特征在于:步骤(a)中通过onvif协议获取路口电警摄像头的视频流信息。
3.根据权利要求1所述的基于图像语义分割和视角缩放的机动车拥堵长度计算方法,其特征在于,步骤(c)包括如下步骤:
4.根据权利要求1所述的基于图像语义分割和视角缩放的机动车拥堵长度计算方法,其特征在于,步骤(d)包括如下步骤:
5.根据权利要求1所述的基于图像语义分割和视角缩放的机动车拥堵长度计算方法,其特征在于:步骤(e)中使用python中的cv2.bitwise_and函数对二值图像的白色像素区域和二值图像的白色像素区域取交集,得到个在相应车道线上的机动车连通区域。
6.根据权利要求1所述的基于图像语义分割和视角缩放的机动车拥堵长度计算方法,其特征在于,步骤(f)包括如下步骤:
7.根据权利要求6所述的基于图像语义分割和视角缩放的机动车拥堵长度计算方法,其特征在于,步骤(g)包括如下步骤:
8.根据权利要求1所述的基于图像语义分割和视角缩放的机动车拥堵长度计算方法,其特征在于,步骤(h)包括如下步骤:
技术总结
一种基于图像语义分割和视角缩放的机动车拥堵长度计算方法,涉及智慧交通技术领域,直接估算机动车排队长度,从而判断路口拥堵情况。结合了计算机视觉技术以及深度学习技术,并应用几何数学模型将现实距离与视频帧对应长度建立一一映射关系,实现了对拥堵长度的计算。通过车辆语义分割方法、连通区域划分方法和拥堵长度建模,可以准确估算拥堵时段机动车排队长度,进而评估拥堵状况。
技术研发人员:贾明雨,闵万里,丁鑫,田钿,孙铭,张朝瑞,焦学䶮
受保护的技术使用者:神思电子技术股份有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!