基于改进贪婪算法的道路巡检方法、系统、设备和介质与流程
本发明涉及道路巡检路径规划,尤其涉及一种基于改进贪婪算法的道路巡检方法、道路巡检系统、设备和介质。
背景技术:
1、随着城市迅速发展,城市内的车辆与日俱增,交通压力不断上涨,道路健康是保障交通顺畅的基础,因此,需要频繁进行道路巡检工作,以检查道路的健康程度。道路巡检工作中,合理选择巡检路径对加快巡检速度、提高服务质量、降低成本以及增加经济效益有很大的影响,所以道路巡检业务需要一种切实可行的路径规划方法。
2、现有的道路巡检路径规划方法主要有两种,第一种为精确算法,可以求出其最优解,主要运用线性规划、整数规划、非线性规划等数学规划技术来描述巡检路径的模型关系,以便求得最优决策,精确算法基于严格的数学手段,在可以求解的情况下,通常要优于启发式人工智能算法,但是由于引入严格的数学方法,计算量随问题规模的增大呈指数增长,计算量大,耗时长,无法避开指数爆炸问题,适应能力较差,不能满足实时计算的要求,在实际中应用范围非常有限;第二种为启发式算法,是在状态空间中的改进搜索算法,它对每一个搜索的位置进行评价,得到最好的位置,再从这个位置进行搜索直到目标,目前已提出的启发式人工算法较多,其中贪婪算法常被用来解决路径规划的问题,但是传统贪婪算法不能从整体最优上加以考虑,尽管每一步都确保能获得局部最优解,但并不是所有的输入数据都能找到可行解。
3、因此,需要提供一种基于改进贪婪算法的道路巡检方法、道路巡检系统、设备和介质,能够在有限时间内对道路巡检路径作出最优规划,减小测量误差。
4、在所述背景技术部分公开的上述信息仅用于加强对本申请的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明主要目的是克服道路巡检路径规划不能同时具备计算量小和计算准确的问题,提供一种基于改进贪婪算法的道路巡检方法、道路巡检系统、设备和介质,能够在有限时间内对道路巡检路径作出最优规划,减小测量误差。
2、为实现上述的目的,本发明第一方面提供了一种基于改进贪婪算法的道路巡检方法,包括以下步骤:
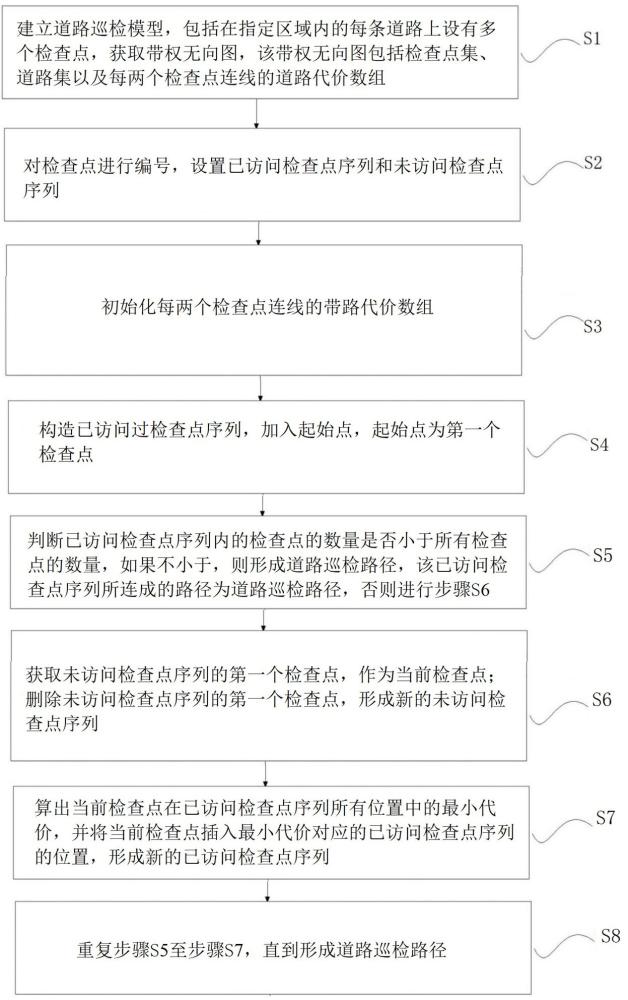
3、s1:建立道路巡检模型,包括在指定区域内的每条道路上设有多个检查点,获取带权无向图,该带权无向图包括检查点集、道路集以及每两个检查点连线的道路代价数组;
4、s2:对检查点进行编号,设置已访问检查点序列和未访问检查点序列;
5、s3:初始化每两个检查点连线的道路代价数组;
6、s4:构造已访问检查点序列,加入起始点,起始点为第一个检查点;
7、s5:判断已访问检查点序列内的检查点的数量是否小于所有检查点的数量,如果不小于,则形成道路巡检路径,该已访问检查点序列所连成的路径为道路巡检路径,否则进行步骤s6;
8、s6:获取未访问检查点序列的第一个检查点,作为当前检查点;删除未访问检查点序列的第一个检查点,形成新的未访问检查点序列;
9、s7:算出当前检查点在已访问检查点序列所有位置中的最小代价,并将当前检查点插入最小代价对应的已访问检查点序列的位置,形成新的已访问检查点序列;
10、s8:重复步骤s5至步骤s7,直到形成道路巡检路径。
11、根据本发明一示例实施方式,步骤s3中,所述初始化每两个检查点连线的道路代价数组的方法包括:按照邻接矩阵的方法填充每两个检查点连线的道路代价数组。
12、根据本发明一示例实施方式,步骤s6中,所述获取未访问检查点序列的第一个检查点之前,先判断未访问检查点序列中检查点的数量是否为0,如果为0则执行步骤s5。
13、根据本发明一示例实施方式,步骤s7中,所述算出当前检查点在已访问检查点序列所有位置中的最小代价的方法包括:计算当前检查点插入已访问检查点序列中第二个位置至最后一个位置的最小的路径代价和作为最小代价。
14、根据本发明一示例实施方式,所述计算当前检查点插入已访问检查点序列中第二个位置至最后一个位置的最小的路径代价和作为最小代价的方法包括:
15、s71:从已访问检查点序列中第二个位置开始遍历至最后一个位置;
16、s72:将当前检查点插入已访问检查点序列;
17、s73:计算当前已访问检查点序列的路径代价和;
18、s74:记录最小的路径代价和并保存当前检查点在已访问检查点序列中的位置;
19、s75:从已访问检查点序列中删除当前检查点;
20、s76:重复步骤s71至步骤s75,完成第二个位置开始遍历至最后一个位置后,获取最小的路径代价和及对应的当前检查点在已访问检查点序列中的位置;该最小的路径代价和为最小代价。
21、根据本发明一示例实施方式,步骤s7由贪婪算法决定。
22、作为本发明的第二个方面,本发明提供一种道路巡检系统,该道路巡检系统可实现所述基于改进贪婪算法的道路巡检方法。
23、根据本发明一示例实施方式,所述道路巡检系统包括模型初始化模块、模型数据填写模块及道路巡检路径计算模块;
24、所述模型初始化模块用于建立道路巡检模型,包括在指定区域内的每条道路上设有多个检查点,获取带权无向图,该带权无向图包括检查点集、道路集以及每两个检查点连线的道路代价数组;
25、所述模型数据填写模块用于对检查点进行编号,设置已访问检查点序列和未访问检查点序列;初始化每两个检查点连线的道路代价数组;
26、所述道路巡检路径计算模块用于构造已访问检查点序列,加入起始点,起始点为第一个检查点;判断已访问检查点序列内的检查点的数量是否小于所有检查点的数量,如果不小于,则形成道路巡检路径,该已访问检查点序列所连成的路径为道路巡检路径;获取未访问检查点序列的第一个检查点,作为当前检查点;删除未访问检查点序列的第一个检查点,形成新的未访问检查点序列;算出当前检查点在已访问检查点序列所有位置中的最小代价,并将当前检查点插入最小代价对应的已访问检查点序列的位置,形成新的已访问检查点序列;重复取出未访问检查点序列的检查点插入已访问检查点序列,直到形成道路巡检路径。
27、作为本发明的第三个方面,本发明提供一种电子设备,包括:
28、一个或多个处理器;
29、存储装置,用于存储一个或多个程序;
30、当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现所述基于改进贪婪算法的道路巡检方法。
31、作为本发明的第四个方面,本发明提供一种计算机可读介质,其上存储有计算机程序,所述程序被处理器执行时实现所述基于改进贪婪算法的道路巡检方法。
32、本发明的优势效果是,本发明基于改进贪婪算法找到最优的道路巡检路径规划,能够在有限时间内对道路巡检路径作出最优规划,减小测量误差。
技术特征:
1.一种基于改进贪婪算法的道路巡检方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于改进贪婪算法的道路巡检方法,其特征在于,步骤s3中,所述初始化每两个检查点连线的道路代价数组的方法包括:按照邻接矩阵的方法填充每两个检查点连线的道路代价数组。
3.根据权利要求1所述的基于改进贪婪算法的道路巡检方法,其特征在于,步骤s6中,所述获取未访问检查点序列的第一个检查点之前,先判断未访问检查点序列中检查点的数量是否为0,如果为0则执行步骤s5。
4.根据权利要求1所述的基于改进贪婪算法的道路巡检方法,其特征在于,步骤s7中,所述算出当前检查点在已访问检查点序列所有位置中的最小代价的方法包括:计算当前检查点插入已访问检查点序列中第二个位置至最后一个位置的最小的路径代价和作为最小代价。
5.根据权利要求4所述的基于改进贪婪算法的道路巡检方法,其特征在于,所述计算当前检查点插入已访问检查点序列中第二个位置至最后一个位置的最小的路径代价和最为最小代价的方法包括:
6.根据权利要求1所述的基于改进贪婪算法的道路巡检方法,其特征在于,步骤s7由贪婪算法决定。
7.一种道路巡检系统,其特征在于,该系统可实现权利要求1-6中任一种所述的基于改进贪婪算法的道路巡检方法。
8.根据权利要求7所述的道路巡检系统,其特征在于,包括:模型初始化模块、模型数据填写模块及道路巡检路径计算模块;
9.一种电子设备,其特征在于,包括:
10.一种计算机可读介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1-6中任一所述的基于改进贪婪算法的道路巡检方法。
技术总结
本发明涉及道路巡检路径规划技术领域,提供一种基于改进贪婪算法的道路巡检方法、系统、设备和介质,方法包括:S1:建立道路巡检模型;S2:对检查点进行编号,设置已访问检查点序列和未访问检查点序列;S3:初始化道路代价数组;S4:构造已访问检查点序列,加入起始点;S5:判断已访问检查点序列内的检查点的数量是否小于所有检查点的数量,如果不小于,则形成道路巡检路径;S6:获取未访问检查点序列的第一个检查点作为当前检查点;S7:算出当前检查点在已访问检查点序列所有位置中的最小代价,将当前检查点插入已访问检查点序列;S8:重复步骤S5至S7,直到形成道路巡检路径。本方案能够在有限时间内对道路巡检路径作出最优规划。
技术研发人员:孙洁琼,王伟,李长林,刘坤,邵建雄,魏华
受保护的技术使用者:中交通力建设股份有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!