一种基于点云数据的墙面施工进度监测方法与流程
本发明涉及数据处理,特别涉及一种基于点云数据的墙面施工进度监测方法。
背景技术:
1、当前的建筑行业的各方面工作都主要依靠人工去完成,随着人们知识水平和生活质量的提高,愿意从事建筑行业工作的人也越来越少。在建筑过程中,施工进度以及施工质量的监测,目前主要依靠人工来完成。由于人工作业时存在的疏忽,进度和质量的监测难免会存在错误,并且人工去测量建筑场景并对设计图纸进行比对,费时费力。
2、相关技术中缺少一种自动化的对墙面的施工进度进行监测的方法。
技术实现思路
1、本发明提供一种基于点云数据的墙面施工进度监测方法,解决了人工去测量建筑场景并对设计图纸进行比对,费时费力的技术问题。
2、根据本公开的一方面,提供了一种基于点云数据的墙面施工进度监测方法,所述方法包括:
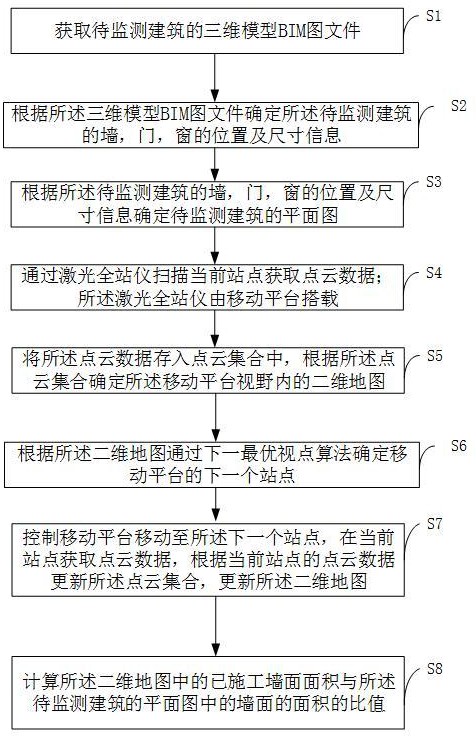
3、s1,获取待监测建筑的三维模型bim图文件;
4、s2,根据所述三维模型bim图文件确定所述待监测建筑的墙,门,窗的位置及尺寸信息;
5、s3,根据所述待监测建筑的墙,门,窗的位置及尺寸信息确定待监测建筑的平面图;
6、s4,通过激光全站仪扫描当前站点获取点云数据;所述激光全站仪由移动平台搭载;
7、s5,将所述点云数据存入点云集合中,根据所述点云集合确定所述移动平台视野内的二维地图;
8、s6,根据所述二维地图通过下一最优视点算法确定移动平台的下一个站点;
9、s7,控制移动平台移动至所述下一个站点,在当前站点获取点云数据,根据当前站点的点云数据更新所述点云集合,更新所述二维地图;
10、s8,计算所述二维地图中的已施工墙面面积与所述待监测建筑的平面图中的墙面的面积的比值;
11、如果所述比值大于预设的阈值,则停止对待测建筑的扫描,所述比值即为墙面的施工进度;
12、如果所述比值小于预设的阈值,则继续执行步骤s6-s8,直至采集完所有的站点,根据二维地图中的已施工墙面面积与所述待监测建筑的平面图中的墙面的面积的比值确定墙面的施工进度。
13、在一种可能的实现方式中,所述移动平台为机器人,在待监测建筑室内,所述机器人在已知完工地图的情况下确定待扫描的站点,自主移动至待扫描的站点;所述机器人还用于控制激光全站仪。
14、在一种可能的实现方式中,s6,根据所述二维地图通过下一最优视点算法确定移动平台的下一个站点,包括:
15、s61,根据所述移动平台视野内的二维地图,通过边缘检测的方式识别出未封闭的区域;
16、s62,将所有未封闭的区域入口的中点作为快速随机扩展树生长的终点,并对所述移动平台视野内的二维地图运行快速随机扩展树rrt算法;
17、s63,在快速随机扩展树节点上进行模拟扫描,计算每个节点的预计增益,确定增益最大的扫描点为下一个站点。
18、在一种可能的实现方式中,所述根据所述点云集合确定所述移动平台视野内的二维地图,包括:
19、所述三维模型bim图文件对所述点云集合中的点云数据进行裁剪;
20、通过体素滤波的方式适当对裁剪后的点云数据进行下采样。
21、在一种可能的实现方式中,所述根据所述点云集合确定所述移动平台视野内的二维地图,还包括:
22、采用半径滤波的方式去除点云集合中的噪声点。
23、在一种可能的实现方式中,所述根据所述点云集合确定所述移动平台视野内的二维地图,还包括:
24、将后续站点扫描到的点云数据的坐标转换到第一站的点云坐标系下;
25、通过迭代最近点ipc算法将所有站点的点云数据调整至同一坐标系下。
26、与现有技术相比,本发明的有益效果是:
27、本公开一实施例的一种基于点云数据的墙面施工进度监测方法中机器人搭载激光全站仪,利用快速随机扩展树和下一最优视点算法相结合的方式来获取已知完工场景的点云数据,根据点云数据确定已施工的墙面的二维平面图。根据待监测建筑的三维模型bim图文件确定待监测建筑的平面图。根据已施工的平面图和设计的完工后的平面图确定当前的施工进度。提高了墙面施工进度确定的效率和准确度。解决了人工去测量建筑场景并对设计图纸进行比对,费时费力的技术问题。
技术特征:
1.一种基于点云数据的墙面施工进度监测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种基于点云数据的墙面施工进度监测方法,其特征在于,所述移动平台为机器人,在待监测建筑室内,所述机器人在已知完工地图的情况下确定待扫描的站点,自主移动至待扫描的站点;所述机器人还用于控制激光全站仪。
3.根据权利要求1所述的一种基于点云数据的墙面施工进度监测方法,其特征在于,s6,根据所述二维地图通过下一最优视点算法确定移动平台的下一个站点,包括:
4.根据权利要求1所述的一种基于点云数据的墙面施工进度监测方法,其特征在于,所述根据所述点云集合确定所述移动平台视野内的二维地图,包括:
5.根据权利要求4所述的一种基于点云数据的墙面施工进度监测方法,其特征在于,所述根据所述点云集合确定所述移动平台视野内的二维地图,还包括:
6.根据权利要求5所述的一种基于点云数据的墙面施工进度监测方法,其特征在于,所述根据所述点云集合确定所述移动平台视野内的二维地图,还包括:
技术总结
本发明公开了一种基于点云数据的墙面施工进度监测方法,涉及数据处理技术领域,所述方法包括:获取待监测建筑的三维模型BIM图文件;确定待监测建筑的平面图;通过激光全站仪扫描当前站点获取点云数据;确定所述移动平台视野内的二维地图;确定移动平台的下一个站点;控制移动平台移动至所述下一个站点,在当前站点获取点云数据,根据当前站点的点云数据更新所述点云集合,更新所述二维地图;计算所述二维地图中的已施工墙面面积与所述待监测建筑的平面图中的墙面的面积的比值;确定墙面的施工进度。提高了墙面施工进度确定的效率和准确度。
技术研发人员:柳绪河,丁玉锦,王术光,刘发亮,刘清学,秦泗芳
受保护的技术使用者:青岛亿联建设集团股份有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!