基于视频检测与透视变换的智能公交吊环系统及方法
本发明涉及智能公共交通,具体涉及基于视频检测与透视变换的智能公交吊环系统及方法。
背景技术:
1、随着城市公共交通优先战略的提出,公共交通基础设施的落后问题得到了越来越多人的重视。公共交通吊环作为公交车及地铁中的一项重要的基础设施,为身高较低的乘客设置了抓手,提供了安全保障,由于公交吊环需要满足大多数乘客的需求,其高度设置一般比较高,这就导致身高较矮的乘客需要上举抓握或者甚至无法够到吊环,吊环自然起不到应有的作用,无法舒适使用或根本无法使用公交吊环的问题急需解决。可伸缩的公交吊环为其提供了解决思路,但存在可伸缩吊环初始高度较高,部分乘客难以直接够到吊环进行调节。
2、中国专利cn202221590164公开了一种电动伸缩吊环,包括锁扣组件,锁扣组件装配有连接布条,连接布条装配有电动伸缩机构,电动伸缩机构装配有吊环;电动伸缩机构包括装配箱、正反转电机、缠绕轮、外套杆、内套杆以及牵引绳条,装配箱装配于连接布条,正反转电机装配于装配箱,缠绕轮设于正反转电机的输出端,外套杆装配于装配箱,内套杆滑动设于外套杆内部,吊环设于内套杆下端,牵引绳条一端固定设于缠绕轮侧边,牵引绳条另一端固定设于吊环上端,吊环前后两侧均通过弹簧装配有通断电按钮,该装置通过分别按动两个通断电按钮能够控制吊环上升下降。该电动伸缩吊环仍需要乘客手动控制吊环上升下降。
技术实现思路
1、本发明的目的提供一种基于视频检测与透视变换的智能公交吊环系统,以解决上述现有技术的不足。
2、为实现上述目的,本发明采用如下技术方案:
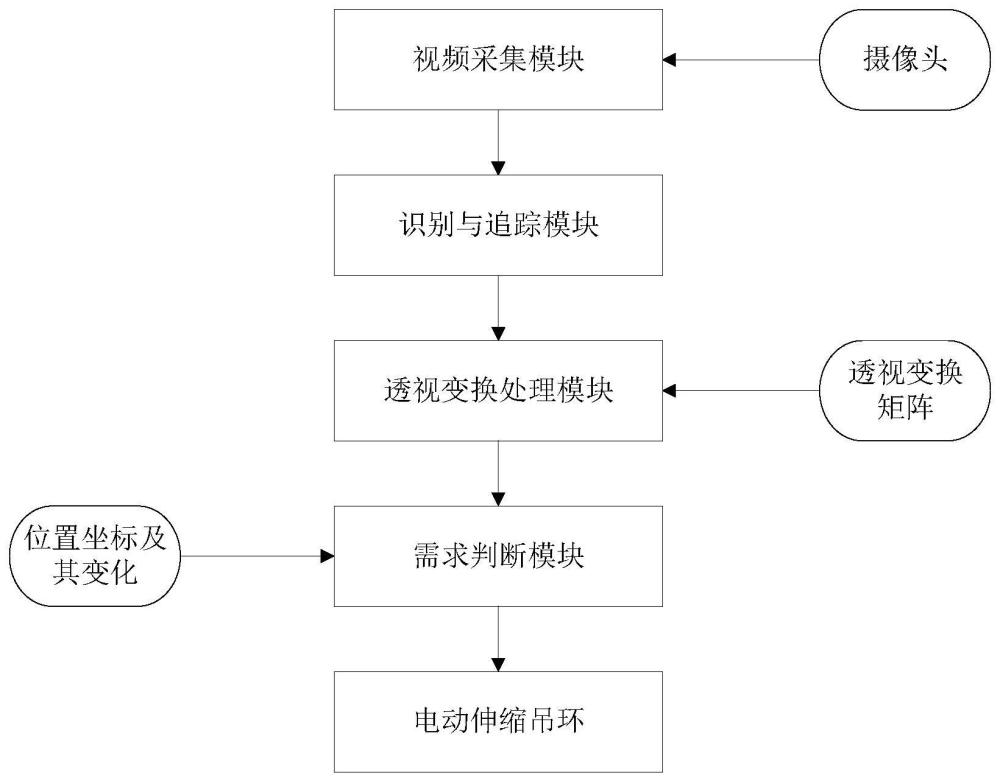
3、基于视频检测与透视变换的智能公交吊环系统,包括:
4、视频采集模块,实时采集公交车内的视频图像;
5、识别与追踪模块,对采集到的视频图像进行实时处理,识别出车内乘客并进行目标追踪,获取每个乘客的位置坐标;
6、透视变换模块,对所有乘客的位置坐标进行透视变换处理,将乘客的位置坐标投影到平行于路面的平面上;
7、需求判断模块,根据透视变换处理后的位置坐标及其变化判断乘客是否有吊环使用需求并生成调节指令;
8、电动伸缩吊环,接收调节指令对吊环进行高度调节。
9、基于视频检测与透视变换的智能公交吊环系统的实现方法,包括以下步骤:
10、s1、通过视频采集模块实时采集公交车内的视频图像并实时传输至识别与追踪模块;
11、s2、通过识别与追踪模块对采集到的视频图像进行实时处理,对每个乘客进行标记并确定其中心在视频图像中的位置坐标,并将坐标信息传输至透视变换模块;
12、s3、通过透视变换模块将每个乘客的位置坐标转换为平行于路面的平面上上的坐标并传输至需求判断模块;
13、s4、需求判断模块根据透视变换处理后的位置坐标及其变化判断乘客是否有使用吊环的需求并生成相应的调节指令传输至电动控制器;
14、s5、电动控制器根据传入的调节命令对吊环进行高度调节。
15、进一步地,所述视频采集模块连接有车载摄像头作为输入设备。
16、进一步地,所述识别与追踪模块封装有视频检测框架yolov8和基于python语言编写的坐标传输程序,所述识别与追踪模块识别出的每个乘客的中心在视频图像中的位置坐标为(ui,vi)。
17、进一步地,通过透视变换模块将每个乘客的位置坐标投影到平行于路面的平面上,具体通过以下方法实现:
18、首先将位置坐标为(ui,vi)所在的二维平面记作α,将平行于路面的二维平面记作β,平面β覆盖所有吊环所在的区域;
19、然后在平面α上找到四个不在一条直线上的点坐标(u1,v1)、(u2,v2)、(u3,v3)、(u4,v4),并在平面β上分别找到与之相应的映射点坐标(x1,y1)、(x2,y2)、(x3,y3)、(x4,y4);
20、再基于python的opencv库与numpy库,将四组点坐标及其映射点坐标分别带入公式(1)求出仿射矩阵a并储存;
21、
22、
23、然后基于公式(3)编写python程序实现矩阵乘法并将该程序封装在透视变换模块中,在位置坐标(ui,vi)传入透视变换模块后,计算出在平面α上所有乘客的位置坐标(ui,vi)在平面β上所对应的位置坐标(xi,yi);
24、
25、进一步地,所述需求判断模块所述需求判断模块封装有python语言编写的需求判断程序,通过检测坐标(xi,yi)是否在某个吊环区域内且该坐标未发生变化的持续时间t达到了预设阈值t来判断乘客是否有使用吊环的需求并生成相应的调节指令;具体方法如下:
26、首先在平面β上划分出n个以电动伸缩吊环为中心的方形区域,每个区域对应一个坐标集;
27、若坐标(xi,yi)属于某一坐标集且持续时间t达到了预设阈值t,则判定该坐标对应的乘客有使用吊环的需求并生成降低吊环的调节命令;
28、若坐标(xi,yi)属于某一坐标集但持续时间t未达到预设阈值t,则判定该坐标对应的乘客只是经过,无使用吊环的需求;
29、若坐标(xi,yi)不属于任何一个坐标集且吊环已经降低,则判定乘客使用过吊环且已离开,生成上升吊环的调节指令;
30、若坐标(xi,yi)不属于任何一个坐标集且吊环还未降低,则判定乘客无使用吊环的需求。
31、进一步地,所述电动伸缩吊环包括锁扣组件,锁扣组件装配有连接布条,连接布条装配有电动伸缩机构,电动伸缩机构装配有吊环;电动伸缩机构包括装配箱、正反转电机、缠绕轮、外套杆、内套杆以及牵引绳条,装配箱装配于连接布条,正反转电机装配于装配箱,缠绕轮设于正反转电机的输出端,外套杆装配于装配箱,内套杆滑动设于外套杆内部,吊环设于内套杆下端,牵引绳条一端固定设于缠绕轮侧边,牵引绳条另一端固定设于吊环上端,吊环前后两侧均通过弹簧装配有通断电按钮,所述通断电按钮连接有电动控制器,所述电动控制器通过接收需求判断模生成的调节指令控制两个通断电按钮调节吊环上升下降。
32、由以上技术方案可知,本发明通过视频检测技术与透视变换确定乘客的位置坐标,并与对应的吊环区域进行匹配,经需求判断后电动伸缩吊环自动调节吊环的高度,使乘客能够更加安全、便捷的乘坐公交车。
技术特征:
1.基于视频检测与透视变换的智能公交吊环系统,其特征在于,包括:
2.基于视频检测与透视变换的智能公交吊环系统的实现方法,其特征在于,包括以下步骤:
3.根据权利要求2所述的基于视频检测与透视变换的智能公交吊环系统,其特征在于,所述视频采集模块连接有车载摄像头作为输入设备。
4.根据权利要求2所述的基于视频检测与透视变换的智能公交吊环系统,其特征在于,所述识别与追踪模块封装有视频检测框架yolov8和基于python语言编写的坐标传输程序,所述识别与追踪模块识别出的每个乘客的中心在视频图像中的位置坐标为(ui,vi)。
5.根据权利要求4所述的基于视频检测与透视变换的智能公交吊环系统,其特征在于,通过透视变换模块将每个乘客的位置坐标投影到平行于路面的平面上,具体通过以下方法实现:
6.根据权利要求5所述的基于视频检测与透视变换的智能公交吊环系统,其特征在于,所述需求判断模块封装有python语言编写的需求判断程序,通过检测坐标(xi,yi)是否在某个吊环区域内且该坐标未发生变化的持续时间t达到了预设阈值t来判断乘客是否有使用吊环的需求并生成相应的调节指令,具体方法如下:
7.根据权利要求2所述的基于视频检测与透视变换的智能公交吊环系统,其特征在于,所述电动伸缩吊环包括锁扣组件,锁扣组件装配有连接布条,连接布条装配有电动伸缩机构,电动伸缩机构装配有吊环;电动伸缩机构包括装配箱、正反转电机、缠绕轮、外套杆、内套杆以及牵引绳条,装配箱装配于连接布条,正反转电机装配于装配箱,缠绕轮设于正反转电机的输出端,外套杆装配于装配箱,内套杆滑动设于外套杆内部,吊环设于内套杆下端,牵引绳条一端固定设于缠绕轮侧边,牵引绳条另一端固定设于吊环上端,吊环前后两侧均通过弹簧装配有通断电按钮,所述通断电按钮连接有电动控制器,所述电动控制器通过接收需求判断模生成的调节指令控制两个通断电按钮调节吊环上升下降。
技术总结
本发明提供一种基于视频检测与透视变换的智能公交吊环系统与方法,该系统包括视频采集模块、识别与追踪模块、透视变换模块、需求判断模块以及电动伸缩吊环;通过视频采集模块采集公交车内的视频图像并传输至识别与追踪模块进行实时处理,识别出车内乘客并进行目标追踪,获取每个乘客的位置坐标;透视变换处理对所有乘客的位置坐标进行透视变换处理,需求判断模块根据透视变换处理后的位置坐标及其变化判断乘客是否有吊环使用需求并生成调节指令控制电动伸缩吊环进行高度调节。本发明通过视频检测技术与透视变换确定乘客的位置坐标,并与对应的吊环区域进行匹配,经需求判断后电动伸缩吊环自动降低高度,使乘客能够更加安全、便捷的乘坐公交车。
技术研发人员:于海洋,王晓波,任毅龙,李子墨,赵亚楠,杨阳
受保护的技术使用者:北京航空航天大学合肥创新研究院
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!