燃料电池极板3D点云模型获取装置及方法与流程
本发明涉及3d扫描和建模,更具体地说,涉及一种燃料电池极板3d点云模型获取装置及方法。
背景技术:
1、在燃料电池的生产和研发过程中,获取燃料电池极板的精确3d模型对于燃料电池的性能分析和优化至关重要。传统的3d扫描设备往往存在一系列挑战,包括体积庞大、操作复杂、接触式测量带来表面损伤等问题,这导致它们难以满足燃料电池极板3d模型快速、精确获取的需求。这些传统设备可能需要复杂的校准过程,同时由于其体积庞大,限制了其在生产线或研发实验室中的布置和应用。
2、随着燃料电池技术的不断发展,对于燃料电池极板更精细、更高效的制造和设计需求也日益增长。传统扫描设备的不足之处在于它们无法满足快速、精确、高效的数据获取要求,可能导致生产和研发中的延误和不确定性。因此,寻找一种更先进、更便捷的技术来获取燃料电池极板的3d模型成为当前技术发展的需求之一。
技术实现思路
1、本申请的内容部分用于以简要的形式介绍构思,这些构思将在后面的具体实施方式部分被详细描述。本申请的内容部分并不旨在标识要求保护的技术方案的关键特征或必要特征,也不旨在用于限制所要求的保护的技术方案的范围。
2、本申请的一些实施例提出了一种燃料电池极板3d点云模型获取装置及方法,来解决以上背景技术部分提到的技术问题。
3、作为本申请的第一方面,本申请的一些实施例提供了一种3d点云模型获取方法,适用于获取燃料电池极板的高精度3d点云模型,包括:自适应扫描路径规划;采集点云数据;将采集到的点云数据进行拼接以得到完整的点云模型。
4、进一步的,所述自适应扫描路径规划包括:输入燃料电池的极板尺寸、3d激光线扫相机扫描宽度、二维平台运行速度和加速度,生成“s”形运行路径。
5、进一步的,在自适应扫描路径规划的方法步骤中,默认长轴为扫描方向,系统根据加速度和最大速度计算出每一段轨迹的运行时间和每一行之间平移时间,则总时间to计算方法为:
6、
7、其中n代表扫描行数,vmax为最大速度,xm和xn分别为扫描长度和行之间距离,a为加速度。
8、进一步的,当不同行之间平移完成后,上一段扫描文件尚未完全转存完毕时,换行时间
9、
10、其中:
11、np是点云的数据点量,等于xm*xn;bweb是网络带宽(bit/s);sweb是点云传输的实际速度;sp是点云的数据点大小;sio是硬盘的读写速度。
12、进一步的,所述的将采集到的点云数据进行拼接的方法包含:
13、去除离群点:计算每个点到其k个最近邻居距离的平均值,若某点的距离超出设定的阈值,则视为离群点并去除,判定公式如下:
14、
15、其中:di表示pi到其最近的k个邻居的距离的平均值,pi表示第i个点的坐标,pj表示第j个点的坐标,‖.‖表示欧氏距离;
16、若||pi-pj||>t·di,则pi判定为离群点;其中,t表示某点的距离超出平均距离的t倍。
17、进一步的,所述的将采集到的点云数据进行拼接的方法包含:
18、利用高斯滤波通过对每个点及其邻域点的权重加权平均以实现平滑和去除离群点,平均值的计算公式为:
19、
20、其中,pi′是滤波后的点坐标,pj是点pi的邻域内的点,wij是点pj的高斯权重。
21、进一步的,滤波的计算公式为:
22、
23、其中,σ为高斯核的标准差,r为滤波半径。
24、进一步的,所述的将采集到的点云数据进行拼接的方法包含:
25、在拼接前对两个点云的边缘进行点云裁剪:
26、选取裁剪参数;
27、确定裁剪平面;
28、提取边缘点云;
29、进行计算变换矩阵。
30、进一步的,所述的将采集到的点云数据进行拼接的方法包含:
31、采用ipc算法进行点云配准,其中点云配准包含以下步骤,
32、初始化:在icp点云配准之前,进行初始化对齐操作以确立一个初始的变换矩阵;
33、最近点对应:采用距离度量方式建立源点云中每个点与目标点云中对应点之间的准确对应关系并设定距离阈值排除距离过远的异常对应;
34、计算变换矩阵:计算两个点云之间的旋转矩阵r和平移向量t。设ai和bi分别为源点云和目标点云中的对应点,moptimal是优化后的变换矩阵,那么最小二乘法的目标是:
35、
36、其中,distance(a,b)表示点a和b之间的距离,通过对上述目标函数求解偏导数,并令其等于零,可以得到最优的变换矩阵。这个过程涉及到线性代数和微积分的知识,具体的公式如下:
37、
38、迭代优化:迭代中,新的变换矩阵miter通过优化前一次迭代的变换矩阵mprev和扫描数据scandata来得到,
39、miter=optimize(mprev,scandata)
40、在每次迭代中,将变换后的点云作为新的源点云,重新进行最近点对应、计算变换矩阵和应用变换矩阵的步骤,采用梯度下降法来持续迭代更新规则:
41、
42、其中,α是学习率,是目标函数j相对于变换矩阵的;
43、异常对应处理:通过计算对应点之间的距离,将其与预设的距离阈值进行比较,排除距离过远的对应点对;
44、收敛判断:设定最大迭代次数,当算法达到预设的最大迭代次数时,认为算法已经收敛和/或设定最近点对的平均距离阈值,当最近点对的平均距离小于预设的阈值时,认为算法已经收敛。
45、作为本申请的第二方面,本申请的一些实施例提供了一种燃料电池极板3d点云模型获取装置,用于执行上述3d点云模型获取方法。
46、采用本发明提供的技术方案,与现有技术相比,具有如下有益效果:
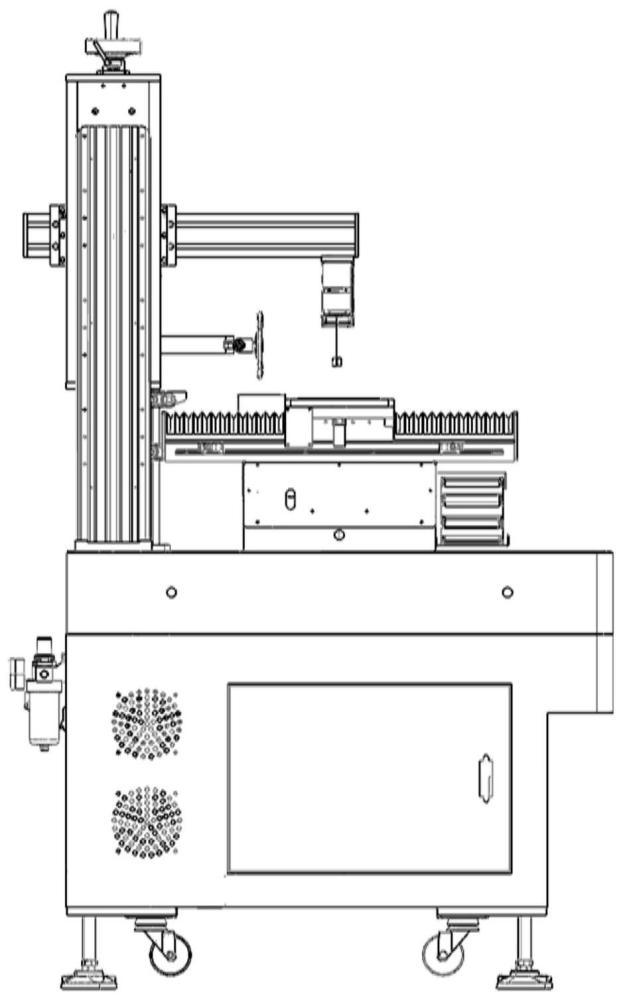
47、(1)本发明的燃料电池极板3d点云模型获取装置由二维直线电机运动平台、3d激光线扫相机和工控机组成,通过匀速运动和平移操作,结合3d激光线扫相机的精确扫描,实现对燃料电池极板的完整3d点云模型获取。
48、(2)本发明的3d点云模型获取方法通过icp算法在自适应扫描路径规划的点云拼接环节中的精细化、迭代式的最近点对应、计算变换矩阵、应用变换矩阵以及异常对应处理等环节,确保了最终获取的点云数据的准确性和完整性。这不仅为后续的数据处理和分析提供了可靠的基础,更为众多领域如三维重建、机器视觉、自动驾驶等提供了有力支持。
技术特征:
1.一种3d点云模型获取方法,适用于获取燃料电池极板的高精度3d点云模型,其特征在于:包括:
2.根据权利要求1所述的3d点云模型获取方法,其特征在于:
3.根据权利要求2所述的3d点云模型获取方法,其特征在于:
4.根据权利要求3所述的3d点云模型获取方法,其特征在于:
5.根据权利要求1至4任意一项所述的3d点云模型获取方法,其特征在于:
6.根据权利要求5所述的3d点云模型获取方法,其特征在于:
7.根据权利要求6所述的3d点云模型获取方法,其特征在于:
8.根据权利要求1至4任意一项所述的3d点云模型获取方法,其特征在于:
9.根据权利要求8所述的3d点云模型获取方法,其特征在于:
10.一种燃料电池极板3d点云模型获取装置,用于执行根据权利要求1至9任意一项所述的3d点云模型获取方法。
技术总结
本发明公开了一种燃料电池极板3D点云模型获取装置及方法,属于3D扫描和建模技术领域。本发明的了一种3D点云模型获取方法,适用于获取燃料电池极板的高精度3D点云模型,包括:自适应扫描路径规划;采集点云数据;将采集到的点云数据进行拼接以得到完整的点云模型。本发明通过ICP算法在自适应扫描路径规划的点云拼接环节中的精细化、迭代式的最近点对应、计算变换矩阵、应用变换矩阵以及异常对应处理等环节,确保了最终获取的点云数据的准确性和完整性。这不仅为后续的数据处理和分析提供了可靠的基础,更为众多领域如三维重建、机器视觉、自动驾驶等提供了有力支持。
技术研发人员:陈国飞,冯小康
受保护的技术使用者:江苏集萃激光科技有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!