一种基于深度学习的车辆轨迹定位追踪方法及系统与流程
本发明涉及车辆轨迹定位,尤其是涉及一种基于深度学习的车辆轨迹定位追踪方法及系统。
背景技术:
1、在当前交通网络中,及时准确的完成对每辆车的轨迹追踪,可以方便完成对车辆未来行驶路线的预测、发生交通事故的车辆准确位置定位排查以及其它车辆事件的检测;然而现有技术中,针对传统车辆轨迹检测只是单一路口下的微观追踪,无法建立整个道路系统前后贯穿的车辆轨迹追踪以及定位问题,此外,传统方法中车辆追踪过程中由于物体遮挡而造成的车辆错检,从而导致生成新的车辆与轨迹信息,且传统车牌识别需要分多步骤,先检测车辆,再检测车牌,最后车牌识别,步骤繁琐影响检测效率,尤其是传统车辆追踪大多依靠单一车辆车牌信息,未考虑车辆属性以及车辆内部等局部信息,导致车牌识别失败时,无法保证多路口的车辆轨迹串联与车辆定位。因此亟需一种基于深度学习的车辆轨迹定位追踪方法及系统。
技术实现思路
1、为了解决上述提到的问题,本发明提供一种基于深度学习的车辆轨迹定位追踪方法及系统。
2、第一方面,本发明提供的一种基于深度学习的车辆轨迹定位追踪方法,采用如下的技术方案:
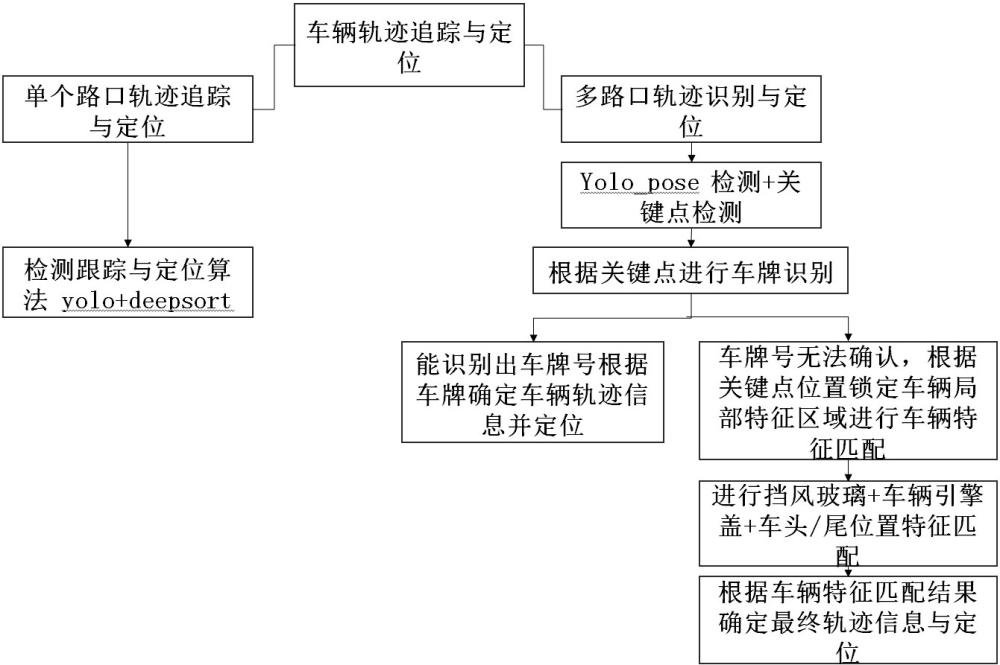
3、一种基于深度学习的车辆轨迹定位追踪方法,包括:
4、获取车辆轨迹信息和图像信息;
5、根据获取的图像信息,利用yolo模型对图像信息进行识别检测,对检测到的车辆添加id标签;
6、对于同一路口,利用deepsort追踪算法对检测到的车辆进行轨迹追踪,通过合并同一车辆轨迹进行id标签合并,并通过设置重合度阈值的进行id标签更新;
7、对于不同路口,利用yolo_pose模型的关键点检测算法对的检测到的车辆进行关键点检测,基于关键点检测进行局部特征匹配,通过局部特征匹配进行车辆的id标签合并及更新;
8、基于id标签的合并和更新,将被检测到的车辆在同一路口和不同路口的轨迹串联,得到车辆轨迹和位置。
9、进一步地,所述获取车辆轨迹信息和图像信息,包括基于视频采集装置获取各个路口的车辆视频,基于车辆视频得到车辆轨迹信息和图像信息。
10、进一步地,所述利用yolo模型对图像信息进行识别检测,对检测到的车辆添加id标签,包括利用yolo模型检测图像信息中每帧的车辆目标,利用检测框框选车辆目标,并为车辆目标设置id标签。
11、进一步地,所述利用deepsort追踪算法对检测到的车辆进行轨迹追踪,通过合并同一车辆轨迹进行id标签合并,包括利用deepsort追踪算法对车辆的轨迹进行预测,并将预测轨迹和当前轨迹进行相似度匹配,通过匹配结果进行id标签合并和更新。
12、进一步地,所述利用yolo_pose模型的关键点检测算法对的检测到的车辆进行关键点检测,基于关键点检测进行局部特征匹配,包括利用yolo_pose模型的关键点检测算法,检测车辆的前端12个关键点以及后端12个关键点,对于选取的24个关键点进行特征识别,得到车辆的24个特征点信息,根据24个特征点信息利用矩形裁剪得到6个局部特征信息图像。
13、进一步地,所述利用yolo_pose模型的关键点检测算法对的检测到的车辆进行关键点检测,基于关键点检测进行局部特征匹配,还包括基于局部特征信息图像进行车牌识别匹配,根据匹配结果进行id标签合并和更新。
14、进一步地,所述利用yolo_pose模型的关键点检测算法对的检测到的车辆进行关键点检测,基于关键点检测进行局部特征匹配,还包括对无法进行车牌识别匹配的车辆,进行关键点区域特征匹配,包括计算关键点区域在不同路口的余弦距离,通过匹配重合度阈值确定是否为同一车辆,若是则进行id合并及更新。
15、第二方面,一种基于深度学习的车辆轨迹定位追踪系统,包括:
16、数据获取模块,被配置为,获取车辆轨迹信息和图像信息;
17、检测模块,被配置为,根据获取的图像信息,利用yolo模型对图像信息进行识别检测,对检测到的车辆添加id标签;
18、追踪模块,被配置为,对于同一路口,利用deepsort追踪算法对检测到的车辆进行轨迹追踪,通过合并同一车辆轨迹进行id标签合并,并通过设置重合度阈值的进行id标签更新;
19、匹配模块,被配置为,对于不同路口,利用yolo_pose模型的关键点检测算法对的检测到的车辆进行关键点检测,基于关键点检测进行局部特征匹配,通过局部特征匹配进行车辆的id标签合并及更新;
20、输出模块,被配置为,基于id标签的合并和更新,将被检测到的车辆在同一路口和不同路口的轨迹串联,得到车辆轨迹和位置。
21、第三方面,本发明提供一种计算机可读存储介质,其中存储有多条指令,所述指令适于由终端设备的处理器加载并执行所述的一种基于深度学习的车辆轨迹定位追踪方法。
22、第四方面,本发明提供一种终端设备,包括处理器和计算机可读存储介质,处理器用于实现各指令;计算机可读存储介质用于存储多条指令,所述指令适于由处理器加载并执行所述的一种基于深度学习的车辆轨迹定位追踪方法。
23、综上所述,本发明具有如下的有益技术效果:
24、1、本发明通过多路口微观车辆轨迹信息记录与结合,实现整条路线宏观车辆轨迹追踪、定位与统计;
25、2、采用基于yolo_pose的多路口车辆图像特征点检测与区域特征识别,利用车牌信息与车辆局部特征信息相结合,实现不同路口同一车辆的信息匹配,建立整条交通网络中完整的车辆轨迹信息,进而确定每辆车的位置;
26、3、通过重合度计算判断车辆id标签信息,防止由于物体遮挡而造成的车辆错检;
27、4、采用yolo_pose车牌关键点检测,直接确定车牌位置,省去多余步骤,提高车牌识别效率;
28、5、通过yolo_pose识别车窗、车灯等局部特征信息,配合车牌识别信息,进一步提高多路口同一车辆的轨迹匹配准确度。
技术特征:
1.一种基于深度学习的车辆轨迹定位追踪方法,其特征在于,包括:
2.根据权利要求1所述的一种基于深度学习的车辆轨迹定位追踪方法,其特征在于,所述获取车辆轨迹信息和图像信息,包括基于视频采集装置获取各个路口的车辆视频,基于车辆视频得到车辆轨迹信息和图像信息。
3.根据权利要求2所述的一种基于深度学习的车辆轨迹定位追踪方法,其特征在于,所述利用yolo模型对图像信息进行识别检测,对检测到的车辆添加id标签,包括利用yolo模型检测图像信息中每帧的车辆目标,利用检测框框选车辆目标,并为车辆目标设置id标签。
4.根据权利要求3所述的一种基于深度学习的车辆轨迹定位追踪方法,其特征在于,所述利用deepsort追踪算法对检测到的车辆进行轨迹追踪,通过合并同一车辆轨迹进行id标签合并,包括利用deepsort追踪算法对车辆的轨迹进行预测,并将预测轨迹和当前轨迹进行相似度匹配,通过匹配结果进行id标签合并和更新。
5.根据权利要求4所述的一种基于深度学习的车辆轨迹定位追踪方法,其特征在于,所述利用yolo_pose模型的关键点检测算法对的检测到的车辆进行关键点检测,基于关键点检测进行局部特征匹配,包括利用yolo_pose模型的关键点检测算法,检测车辆的前端12个关键点以及后端12个关键点,对于选取的24个关键点进行特征识别,得到车辆的24个特征点信息,根据24个特征点信息利用矩形裁剪得到6个局部特征信息图像。
6.根据权利要求5所述的一种基于深度学习的车辆轨迹定位追踪方法,其特征在于,所述利用yolo_pose模型的关键点检测算法对的检测到的车辆进行关键点检测,基于关键点检测进行局部特征匹配,还包括基于局部特征信息图像进行车牌识别匹配,根据匹配结果进行id标签合并和更新。
7.根据权利要求6所述的一种基于深度学习的车辆轨迹定位追踪方法,其特征在于,所述利用yolo_pose模型的关键点检测算法对的检测到的车辆进行关键点检测,基于关键点检测进行局部特征匹配,还包括对无法进行车牌识别匹配的车辆,进行关键点区域特征匹配,包括计算关键点区域在不同路口的余弦距离,通过匹配重合度阈值确定是否为同一车辆,若是则进行id合并及更新。
8.一种基于深度学习的车辆轨迹定位追踪系统,其特征在于,包括:
9.一种计算机可读存储介质,其中存储有多条指令,其特征在于,所述指令适于由终端设备的处理器加载并执行如权利要求1所述的一种基于深度学习的车辆轨迹定位追踪方法。
10.一种终端设备,包括处理器和计算机可读存储介质,处理器用于实现各指令;计算机可读存储介质用于存储多条指令,其特征在于,所述指令适于由处理器加载并执行如权利要求1所述的一种基于深度学习的车辆轨迹定位追踪方法。
技术总结
本发明涉及车辆轨迹定位技术领域,尤其是涉及一种基于深度学习的车辆轨迹定位追踪方法及系统。所述方法,包括获取车辆轨迹信息和图像信息;根据获取的图像信息,利用yolo模型对图像信息进行识别检测,对检测到的车辆添加ID标签;对于同一路口,利用deepsort追踪算法对检测到的车辆进行轨迹追踪,通过合并同一车辆轨迹进行ID标签合并,并通过设置重合度阈值的进行ID标签更新。本发明采用基于yolo_pose的多路口车辆图像特征点检测与区域特征识别,利用车牌信息与车辆局部特征信息相结合,实现不同路口同一车辆的信息匹配,建立整条交通网络中完整的车辆轨迹信息,进而确定每辆车的位置。
技术研发人员:钱钧,邹伯昌,马瑞,郑贵君
受保护的技术使用者:山东未来网络研究院(紫金山实验室工业互联网创新应用基地)
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!