基于多特征选择与融合的行程时间预测方法
本发明属于道路交通预测,具体是一种基于多特征选择与融合的行程时间预测方法。
背景技术:
1、行程时间预测是指对于给定出发时刻、出发地点和到达地点,预测未来一段时间内通过指定路段到达目的地所需花费的出行时间。行程时间预测在交通出行和管控等方面扮演着重要角色,实时精准的预测结果可以有效缓解交通拥堵,提高出行效率。
2、随着信息技术的快速发展,行程时间预测研究的不断推进,基于深度学习的行程时间预测方法受到广泛关注和研究。利用足够的历史行程数据对神经网络模型进行训练,模型自动从历史行程数据中学习规律,能够较好地处理行程数据的随机性与非线性特征,提高预测精度。影响行程时间的因素有很多,故行程数据中包括多种参数,为了使模型在众多的输入信息中聚焦于对当前预测任务更为关键的信息,降低对其他信息的关注度,学者们在神经网络的基础上引入了注意力机制,通过模型自主学习出的一组权重系数,提高对重要特征的关注度。现有的预测模型基于时空注意力机制重点考虑了时空特征之间的相关性,但是没有对时间特征和空间特征进行充分提取和选择,导致特征冗余。现有的时空注意力机制分别使用输入的空间数据和时间数据计算空间注意力权重和时间注意力权重,缺乏对数据整体性的考虑,没有充分考虑时空特征与输入数据整体之间的相关性,而且都是采用传统的注意力机制,传统的注意力机制将输入数据分别与三个可训练的参数矩阵相乘,生成查询(q)、键(k)和值(v),相当于实现了一次线性变换,增强了模型的拟合能力。此外,现有的预测模型并未充分考虑距离、速度、天气等因素对行程时间的影响。
技术实现思路
1、针对现有技术的不足,本发明的目的在于,提出一种基于多特征选择与融合的行程时间预测方法。
2、本发明解决所述技术问题采用如下的技术方案:
3、一种基于多特征选择与融合的行程时间预测方法,其特征在于,该方法包括以下步骤:
4、步骤s1:获取包括时间、空间和其他数据在内的交通行程数据,得到交通行程数据向量;其中,时间数据包括出发时刻,空间数据包括出发地点、到达地点,其他数据包括距离、速度、天气在内的影响行程时间的参数;
5、步骤s2:构建行程时间预测模型;
6、在行程时间预测模型中,空间、时间和其他数据分别经过空间特征提取模块、时间特征提取模块以及其他特征提取模块,得到空间特征向量、时间特征向量和其他特征向量;
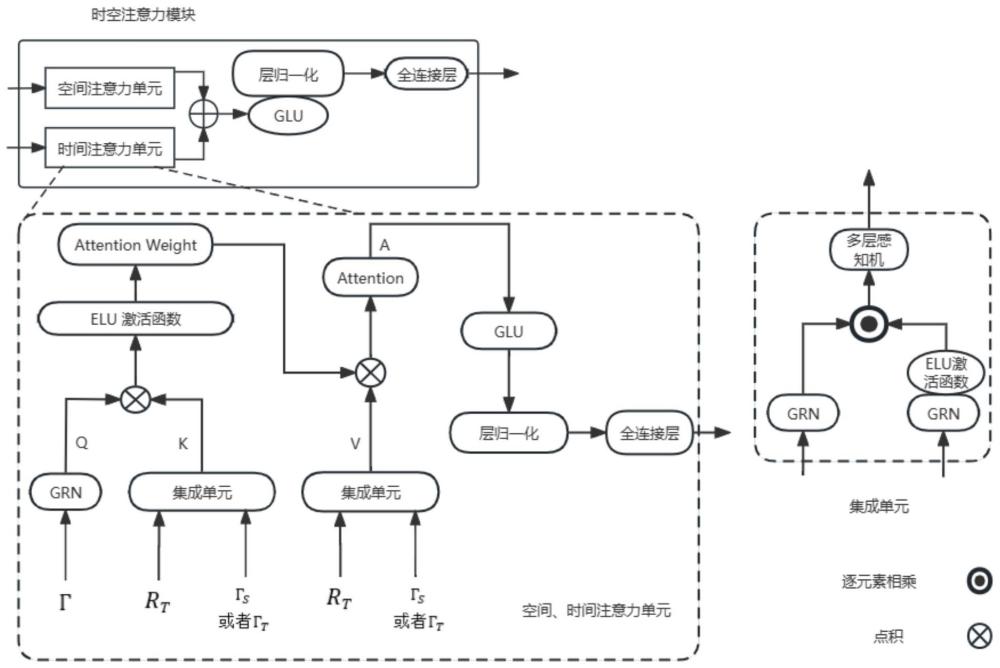
7、将交通行程数据向量经过聚类得到相似历史行程特征向量,相似历史行程特征向量、交通行程数据向量、空间特征向量和时间特征向量作为时空注意力模块的输入,在时空注意力模块中,相似历史行程特征向量和空间特征向量分别经过门控残差网络进行处理,得到相似历史行程特征和空间特征;相似历史行程特征经过elu激活函数后与空间特征逐元素相乘,再经过多层感知机得到空间向量;空间向量与空间特征的各分量对应相乘再求和,得到空间注意力机制的键向量和值向量;其中,空间向量φs的表达式为:
8、φs=mlp(elu(θ(rt))⊙(θ(γs))) (1)
9、式中,θ(rt)表示相似历史行程特征,rt表示相似历史行程特征向量,θ(γs)表示空间特征,γs表示空间特征向量,⊙表示逐元素相乘操作,mlp(·)表示多层感知机,elu(·)表示elu激活函数;
10、空间注意力机制的键向量ks和值向量vs表示为:
11、
12、式中,φs(j)表示空间向量φs的第j个分量,θ(γs)(j)表示空间特征θ(γs)的第j个分量,m表示空间特征和空间向量的分量数;
13、在空间注意力单元中,交通行程数据向量经过门控残差网络,得到行程特征;将行程特征作为查询向量,根据式(3)和(4)得到空间注意力权重向量as;
14、ψs=matmul(ks,q) (3)
15、
16、式中,q表示查询向量,matmul(·)表示缩放点积,表示ks的维度;
17、空间注意力权重向量依次经过门控线性单元、层归一化和全连接层,得到空间注意力特征向量;
18、同理,得到时间注意力特征向量;将空间注意力特征向量与时间注意力特征向量相加后,再依次经过门控线性单元单元、层归一化以及全连接层,得到时空特征;
19、其他特征向量经过自注意力机制,得到注意力权重向量;注意力权重向量与其他特征向量相加后,再经过层归一化,得到其他注意力特征向量;
20、时空特征依次经过密集层和elu激活函数后,再与其他注意力特征向量经过密集层和elu激活函数后的特征进行相加,再经过门控残差网络得到行程融合特征;行程融合特征依次经过informer层、门控残差网络以及门控线性单元后,再与行程融合特征相加,相加得到的特征依次经过层归一化、全连接层以及密集层,得到预测的行程时间。
21、步骤s3:利用历史交通行程数据对行程时间预测模型进行训练,将训练后的行程时间预测模型用于预测行程时间;对于给定出发地点、到达地点以及出发时刻的查询,利用训练后的行程时间预测模型输出预测的行程时间。
22、进一步的,所述门控线性单元包括两个分支,一个分支由密集层构成,另一个分支由密集层和elu激活函数构成,门控线性单元的输入分别经过两个分支后再进行相乘,得到门控线性单元的输出。
23、进一步的,所述门控残差网络的输入依次经过密集层、elu激活函数、密集层、带有dropout层的elu激活函数以及门控线性单元后,再与原始输入进行相加;相加得到的特征经过层归一化得到门控残差网络的输出。
24、与现有技术相比,本发明的有益效果是:
25、本发明提出了一种新的时空注意力机制,利用从交通行程数据中提取的空间特征向量和时间特征向量,同时让交通行程数据和利用交通行程数据聚类得到的相似历史行程数据参与注意力权重的计算,不同于传统注意力机制计算查询、键和值的方式,本发明方法利用空间向量和空间特征的各分量对应相乘再求和,得到空间注意力机制的键向量和值向量,时间注意力机制同理,同时将行程特征作为查询向量,经过注意力权重计算,分别得到空间注意力特征向量和时间注意力特征向量,再将空间注意力特征向量和时间注意力特征向量进行融合,得到时空特征,使得模型不仅充分考虑交通行程数据整体的时空相关性,还考虑了交通行程数据与历史行程数据之间的相似性,提高了行程时间预测精度。本发明对于给定出发地点、到达地点和出发时刻的查询,可精准预测行程时间,在居民出行、交通规划、安全管理和道路资源配置等方面起到重要作用,可以为道路管理部门决策管理提供决策依据,提高道路服务质量。
技术特征:
1.一种基于多特征选择与融合的行程时间预测方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的基于多特征选择与融合的行程时间预测方法,其特征在于,所述门控线性单元包括两个分支,一个分支由密集层构成,另一个分支由密集层和elu激活函数构成,门控线性单元的输入分别经过两个分支后再进行相乘,得到门控线性单元的输出。
3.根据权利要求1或2所述的基于多特征选择与融合的行程时间预测方法,其特征在于,所述门控残差网络的输入依次经过密集层、elu激活函数、密集层、带有dropout层的elu激活函数以及门控线性单元后,再与原始输入进行相加;相加得到的特征经过层归一化得到门控残差网络的输出。
4.根据权利要求1所述的基于多特征选择与融合的行程时间预测方法,其特征在于,步骤s3中,历史交通行程数据为:γ′=(oloc;dloc;odt;ddt;t;e);其中,oloc和dloc分别表示出发地点和到达地点,odt、ddt分别表示出发时刻和到达时刻,t=ddt-odt表示行程时间,e表示其他数据。
技术总结
本发明公开了一种基于多特征选择与融合的行程时间预测方法,首先获取包括时间、空间和其他数据在内的交通行程数据,得到交通行程数据向量;然后,构建行程时间预测模型;在模型中,空间、时间和其他数据分别经过特征提取模块,得到空间特征向量、时间特征向量和其他特征向量;空间特征向量和时间特征向量在时空注意力模块中,分别经过空间注意力单元和时间注意力单元,得到空间注意力特征向量和时间注意力特征向量;空间、时间注意力特征向量经过融合得到时空特征;其他特征向量经过自注意力机制,得到其他注意力特征向量;时空特征与其他注意力特征向量经过融合得到行程融合特征,行程融合特征再经过预测模块得到预测的行程时间。该方法提出了一种新的时空注意力机制,同时考虑了交通行程数据整体的时空相关性和交通行程数据与历史行程数据之间的相似性,提高了预测精度。
技术研发人员:顾军华,李文垚
受保护的技术使用者:河北工业大学
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!