一种融合作业处方和实时识别决策的无人航空作业方法
本发明涉及农业植保方法,具体涉及一种融合作业处方和实时识别决策的无人航空作业方法。
背景技术:
1、随着信息技术的发展,遥感在农业中的使用越来越广泛,近年来无人机技术的迅速发展,在无人机上搭载遥感、光学、深度设备获取作物信息的方法得到了更多的应用。
2、对于大范围的田地、果园等作物种植地,获取遥感图像通常有卫星遥感、无人机遥感两种获取方式。
3、其中,卫星遥感成像速度快,能够很快的获取作物的全局信息,掌握作物整体的情况,但在基于卫星遥感的农业处方图中,最终只是对作物的信息作分级处理,缺乏对个体或一定单位数量作物的实际信息,在实际作业中不利于精准施药。
4、无人机遥感通过拍摄多张高分辨率图像,经过算法配准合成一张遥感图像,能够一定程度减少天气对图像质量的影响,但是由于拍摄的图像像幅小、数量多,处理过程复杂且花费时间长,不利于对作物的病虫害进行及时处理。
5、此外,现有的遥感图像缺乏实时的天气信息,不利于植保无人机作业在过程中把药物精准喷洒在作物上,容易造成药物喷施量错误。
技术实现思路
1、本发明的目的在于克服上述存在的问题,提供一种融合作业处方和实时识别决策的无人航空作业方法,该无人航空作业方法实现遥感图像与实时图像优势相加、劣势相消,提高农业作业精准性,减少环境污染风险。
2、本发明的目的通过以下技术方案实现:
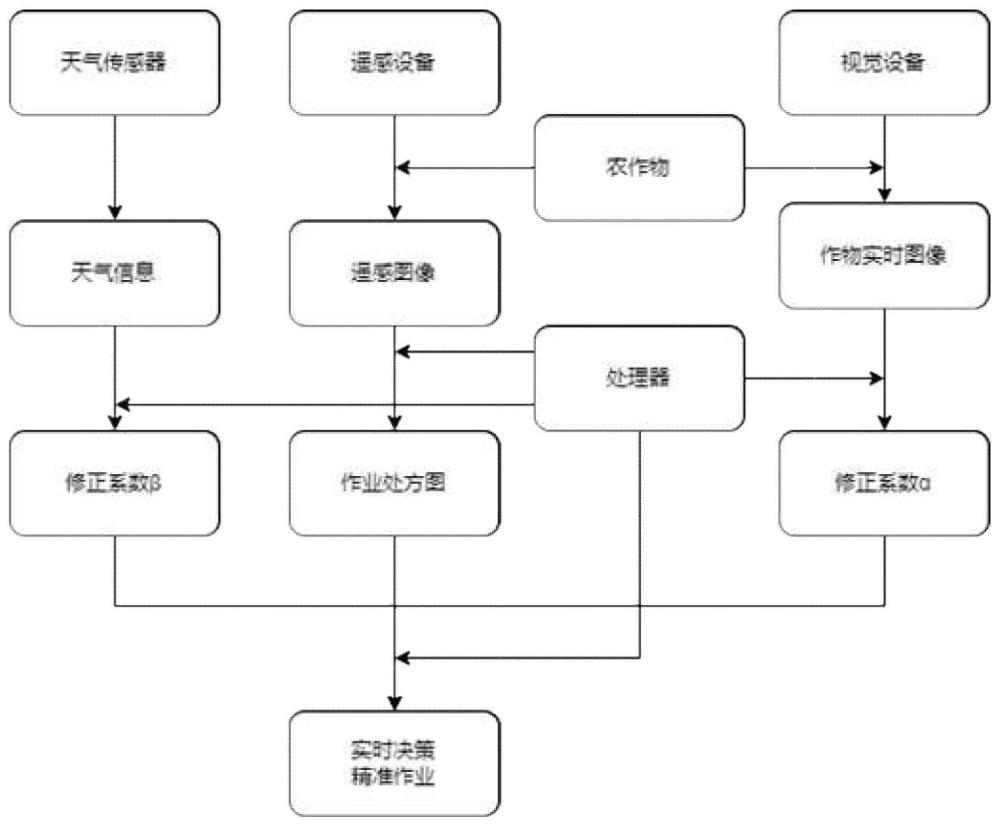
3、一种融合作业处方和实时识别决策的无人航空作业方法,其特征在于,包括以下步骤:
4、(1)利用遥感设备获取田间高分辨率遥感图像;
5、(2)遥感图像经图像预处理后,获取坐标信息;
6、(3)结合机器学习算法,识别并选取所需要的信息,建立农业作业处方图,并使作业处方图的各个区域与坐标信息对应;
7、(4)植保无人机根据农业作业处方图进行路径和喷施量规划,得到参考施药量;
8、(5)通过搭载在植保无人机上的视觉设备获取对应坐标田间作物的实时图像;通过处理器识别出目标信息,并计算修正系数α;
9、(6)通过天气传感器获取多种实时的天气信息,传输给处理器并计算出修正系数β;
10、(7)结合上述得出的修正系数α、β以及参考施药量,计算得到作物实际需要喷洒药物量d。
11、本发明的一个优选方案,在步骤(1)中,所述遥感设备为卫星或无人机。
12、本发明的一个优选方案,在步骤(2)中,所述图像预处理的方法为:
13、经过大气校正、几何校正和配准后,通过将影像与地面控制点或高精度地理信息系统的数据进行匹配,使用全球定位系统作为定位辅助,以此来校正影像的坐标,获取精细的坐标信息数据。
14、本发明的一个优选方案,在步骤(3)中,所述机器学习算法的方式为:
15、通过监督学习算法对遥感图像进行训练,识别出作物中的目标信息,规划出合理的单位面积s,寻找整个遥感图像中目标信息的极大值和极小值,建立分级的农业处方图,分为最低l1级,最高ln级,级距为(max-min)/(n-1)。
16、本发明的一个优选方案,在步骤(4)中,植保无人机路径规划使用的算法为slam算法,将路径经过的作物单位面积区域标记为s1、s2……sn。
17、本发明的一个优选方案,在步骤(4)中,以区域坐标在处方图中对应等级的数值d0为参考,根据公式计算出作业区域施药的参考量dl,以此统筹、规划全局作业所需的喷施量;该公式为:
18、dl=f(do);
19、其中y=f(x)为当前目标信息与施药量特有的函数关系式。
20、本发明的一个优选方案,在步骤(5)中,所述视觉设备能够快速获取单位面积si中作物的图像,并将图像传输给搭载在植保无人机上的处理器,通过深度学习模型识别出目标信息;根据无人机所在坐标处于的单位区域si与处方图对应数值do进行对比,计算出实际作业施药量的修正系数α。
21、进一步,修正系数α的计算公式为:
22、α=k*(d-do);
23、其中k设为0.98,d为该坐标下目标信息的实际观测值,d0i为该坐标在处方图中对应的目标信息数值。
24、进一步,当单位区域里的农作物数量为1时,在作业时识别得到的目标信息d直接替换处方图中的数据。这样可以使处方图中的数据更精确,在间隔较短的下一次作业前,可以省略拍摄遥感图像的步骤,以第一次作业更新后的处方图数据作为更精确的参考值,减少了工作量,提高了工作效率和施药准确性。
25、本发明的一个优选方案,在步骤(6)中,所述天气传感器包括风向传感器、风速传感器、温度传感器、湿度传感器中的一个或多个;
26、所述天气传感器搭载在作物种植地中心距地面10m高处,以天气传感器的观测数据作为整个作物种植地的天气信息,能为植保无人机对喷洒雾滴的飘移与蒸发进行预测提供实时数据,做出实时决策,降低喷洒作业质量低或环境污染的可能性。
27、本发明的一个优选方案,在步骤(6)中,修正系数β的计算公式为:
28、
29、其中,pi为第i种天气信息数据的系数,ri为第i种天气信息的实时监测值。
30、本发明的一个优选方案,在步骤(7)中,所述实时决策包括计算出作物实际需要喷洒药物量d,计算方法为:
31、du=(1+α+β)*dl;
32、其中du为该坐标实际作业中经过修正得出的药物喷洒量,即该单位面积s中作物需要喷洒的药物量;α为植保无人机在实际观测后对处方图参考值的修正系数;β为实时天气信息对该单位区域喷洒量的修正系数;dl为步骤(4)中根据公式计算出的参考施药量。
33、本发明的一个优选方案,在步骤(7)中,还通过处理器分析风速、风向数据,预测雾滴飘移,调整无人机飞行姿态与飞行路径,进一步使当前作业区域的喷施作业更精准。
34、本发明与现有技术相比具有以下有益效果:
35、1、本发明基于遥感图像得到的作业处方图所具有的全局性、参考性信息,外加实时检测识别所具有的精确性、实时性,在植保无人机作业时依据原有参考数据、实时检测作物计算得到的修正系数和实时检测天气计算得到的修正系数,做出实时精准调整,提高植保无人机施药的实时性、精准性,减少环境污染的风险。
36、2、通过视觉设备获取作物图像并传输给处理器,处理器运用神经网络识别出目标信息,对比处方图参考量进而计算出实际所需喷洒的药物量修正系数,提高药物使用效率,减少作物因施药量不当而死亡或生长不良的风险,实现精准农业。
37、3、通过天气传感器获取实时天气信息,处理器根据不同天气信息对药物喷施的影响计算出总体的药物喷施量修正系数,并做出实时决策,调整植保无人机飞行路径,使药物喷洒更准确,体现了精准农业的理念。
技术特征:
1.一种融合作业处方和实时识别决策的无人航空作业方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的融合作业处方和实时识别决策的无人航空作业方法,其特征在于,在步骤(2)中,所述图像预处理的方法为:
3.根据权利要求1所述的融合作业处方和实时识别决策的无人航空作业方法,其特征在于,在步骤(3)中,所述机器学习算法的方式为:
4.根据权利要求1所述的融合作业处方和实时识别决策的无人航空作业方法,其特征在于,在步骤(4)中,以区域坐标在处方图中对应等级的数值do为参考,根据公式计算出作业区域施药的参考量dl,以此统筹、规划全局作业所需的喷施量;该公式为:
5.根据权利要求1所述的融合作业处方和实时识别决策的无人航空作业方法,其特征在于,在步骤(5)中,所述视觉设备获取单位面积si中作物的图像,并将图像传输给搭载在植保无人机上的处理器,通过深度学习模型识别出目标信息;根据无人机所在坐标处于的单位区域si与处方图对应数值do进行对比,计算出实际作业施药量的修正系数α,该修正系数α的计算公式为:
6.根据权利要求5所述的融合作业处方和实时识别决策的无人航空作业方法,其特征在于,当单位区域里的农作物数量为1时,将在作业时识别得到的目标信息d直接替换处方图中的数据。
7.根据权利要求1所述的融合作业处方和实时识别决策的无人航空作业方法,其特征在于,在步骤(6)中,所述天气传感器包括风向传感器、风速传感器、温度传感器、湿度传感器中的一个或多个;
8.根据权利要求1所述的融合作业处方和实时识别决策的无人航空作业方法,其特征在于,在步骤(6)中,修正系数β的计算公式为:
9.根据权利要求1所述的融合作业处方和实时识别决策的无人航空作业方法,其特征在于,在步骤(7)中,计算作物实际需要喷洒药物量d的计算方法为:
10.根据权利要求1所述的融合作业处方和实时识别决策的无人航空作业方法,其特征在于,在步骤(7)中,还通过处理器分析风速、风向数据,预测雾滴飘移,调整无人机飞行姿态与飞行路径,使当前作业区域的喷施作业更精准。
技术总结
本发明公开一种融合作业处方和实时识别决策的无人航空作业方法,包括以下步骤:获取田间高分辨率遥感图像;遥感图像经图像预处理后,获取坐标信息;结合机器学习算法,建立农业作业处方图;植保无人机根据农业作业处方图进行路径和喷施量规划,得到参考施药量;通过搭载在植保无人机上的视觉设备获取对应坐标田间作物的实时图像;通过处理器识别出目标信息,并计算修正系数α;通过天气传感器获取多种实时的天气信息,传输给处理器并计算出修正系数β;结合上述得出的修正系数α、β和参考施药量,计算得到对应作物实际需要喷洒药物量D。该无人航空作业方法实现遥感图像与实时图像优势相加、劣势相消,提高农业作业精准性,减少环境污染风险。
技术研发人员:陈鹏超,廖健宏,兰玉彬,黎源鸿,王冰瑾,彭劲威,刘家欣
受保护的技术使用者:华南农业大学
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!