一种基于超维计算的危险驾驶行为检测方法
本发明属于目标检测领域,涉及利用改进的超维计算网络模型对危险驾驶行为的检测,具体涉及一种基于超维计算的危险驾驶行为检测方法。
背景技术:
1、截至2022年11月底,汽车保有量高达3.18亿辆。对应的机动车驾驶人数超过5亿人,其中汽车驾驶人数量为4.63亿人。这使中国在机动车和驾驶人的总量上均居于世界首位。进一步看2023年的数据,至9月底,汽车保有量为3.3亿辆。因此规范驾驶员的驾驶行为迫在眉睫。
2、深度学习可以从多个层次学习特征,并自动构建原始输入的高级表示。而且与传统方法不同的是,深度学习可以完全自动地提取特征,例如深度学习使用的局部感知、权重共享、多卷积核、下采样等方法。从图像的一部分而不是整个图像中学习局部特征,且最终的识别结果由多个卷积层的结果决定。用于处理图像/帧的一种流行的深度学习方法是卷积神经网络(cnn)。3d cnn结构已经被应用于生成多个信息通道,并在相邻视频帧中执行卷积和下采样。
3、现有提出一种使用深度学习,对驾驶员是否在拨打电话进行检测的方法。通过渐进式pcn算法对人脸检测及追踪,而后使用卷积神经网络对打电话行为检测。还有通过yolo算法对面部和手部进行截取,采用alexnet网络提取特征,在state farm's distacteddriver dataset数据集上的饮水等多类不安全驾驶行为识别上,取得了较高的检测精度。近几年有提出了一种改进的yolov5s网络模型,主要是使用mobilenet-v3结构代替主干网络,并加入sppf结构,将注意力机制与bottleneck结构的方式来检测驾驶员是否有危险驾驶行为。
4、这些方法都可以在一定程度上实现对驾驶员的危险行为进行检测。但是都是在应用神经网络对目标进行检测。但是随着处理任务的难度不断上升,神经网络模型训练规模越来越庞大,目前这些神经网络的训练参数量一般都是在百万以上,巨大的运算量带来漫长的训练时间,以及对硬件要求越来越高。数量巨大的无指标调参、浮点型数据的计算很难在物联网、嵌入式等设备上进行运算。
技术实现思路
1、发明目的:针对现有技术的不足,本发明提出了一种基于超维计算的机动车驾驶员危险驾驶行为的检测方法,使用超维计算外加小型神经网络的检测方法,在检测精确度可接受的范围内大大提高了效率,缩短的检测时间,更大程度上保证了驾驶的安全。
2、技术方案:本发明公开一种基于超维计算的危险驾驶行为检测方法,包括如下步骤:
3、步骤1:收集多张不同类型的危险驾驶图片,并将这些图片进行归类、标注图片对应的不同危险驾驶的类型,再将图片随机进行翻转剪裁操作来扩充数据集的数量;
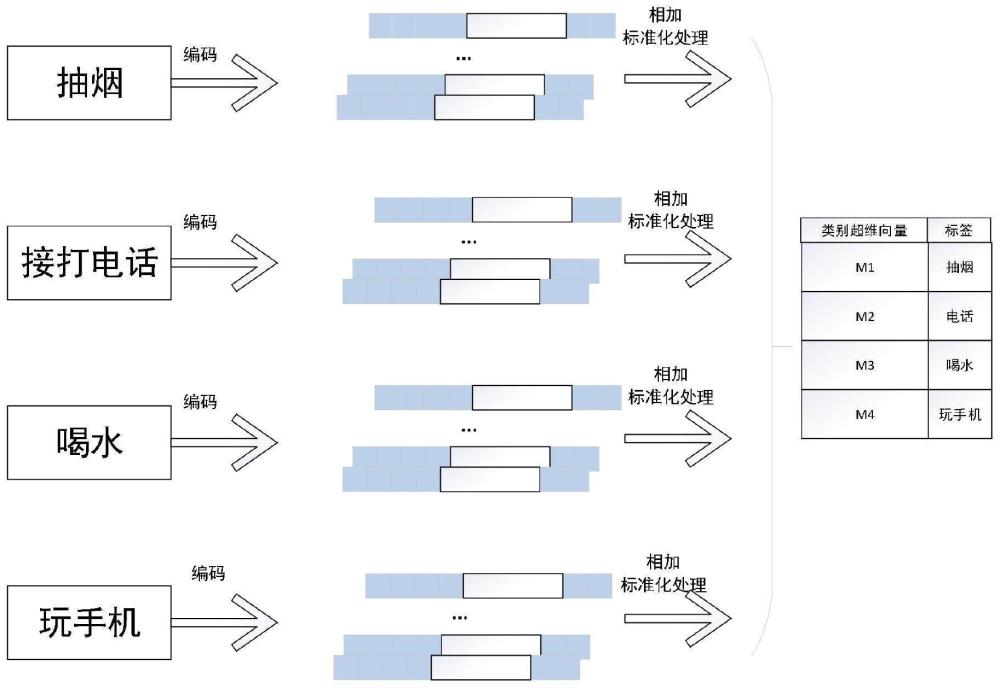
4、步骤2:搭建超维计算模型,将不同类型的图像进行编码、经过处理之后放入类别超维向量中,将类别超维向量与其标签一起存储;
5、步骤3:对数据样本进行超维计算的训练与测试;
6、步骤4:对训练测试好的样本进行adapthd再训练;
7、步骤5:将训练好的模型与三层的小型神经网络相结合,形成最终的危险驾驶行为检测模型,所述小型神经网络输入层为512,隐含层为1024,激活函数使用relu,输出层为512;
8、步骤6:对最终的危险驾驶行为检测模型进行训练后,利用测试图片进行测试,将测试图片进行编码和标准化处理,得到新的图片的超维向量,再计算所述超维向量与类别超维向量的相似度。
9、进一步地,所述步骤2中编码过程具体操作为:编码过程中使用三次卷积与三次maxpooling将图像一步步的处理为一个超维向量,来提取与压缩图片中所存的信息,最终输出一个一行的超维向量,再对特征向量进行特征聚类,完成图像特征的二值化,完成对图像的编码。
10、进一步地,所述步骤2中编码后的特征向量进行处理时,将编码好的特征向量进行标准化处理一共得到ma·mb个超维向量,称为训练超维向量,记作zi(i=1,2…ma·mb),即ma个类别超维向量,每个类别超维向量中含有mb个超维向量;
11、将属于同一类的训练超维向量通过超维计算中的加法运算,得到组成一个集合,记作经过标准化处理后得到ma个类别超维向量,记作nk(k=1,2,…ma),再将类别超维向量与其标签一起存储在被称为联想存储器的存储空间中。
12、进一步地,所述步骤4中对训练测试好的样本进行adapthd再训练具体为:
13、
14、
15、基于迭代的adapthd,通过多次迭代之后的平均训练错误率pe,改变α的值,当平均错误率越大时,α的值越大,反之则越小。
16、进一步地,所述步骤6中计算超维向量与类别超维向量之间的相似度,使用归一化的汉明距离来衡量相似度:
17、
18、用来计算a,b两个超维向量中的有多少维度不相同的数量,n表示维度数;
19、h(a,b)=ham/n1
20、用来计算归一化的汉明距离,因此在超维计算中定义当两个超维向量之间的归一化汉明距离为0.5时这两个超维向量相互伪正交,归一化汉明距离越靠近0说明两个超维向量之间的相似性越好,反之归一化汉明距离越靠近1说明正交性越好,仅当两个超维向量中的元素全部对应相同或不相同时归一化汉明距离才会等于0或1。
21、进一步地,所述步骤6中计算超维向量与类别超维向量之间的相似度,使用余弦距离计算两个向量之间的相似度:
22、
23、与数学中向量的定义相同超维向量之间的余弦距离越接近0,说明它们之间的正交性越高,越接近1,说明其相似性越高,当元素全部对应不相同时,余弦距离为-1。
24、有益效果:
25、本发明提出一种基于超维计算的危险驾驶行为检测方法,解决了连接主义模型(神经网络)的绑定问题,哪个值与哪个变量相互关联之间不再需要一个正式的模型。而是通过使用维度数以千为单位的超维向量来表示不同类型的数据。这些数据大都是以二进制、整数形式再进行存储。这样大大减少了数据的计算量,简化了模型的训练时间,减少了对硬件的依赖。
技术特征:
1.一种基于超维计算的危险驾驶行为检测方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于超维计算的危险驾驶行为检测方法,其特征在于,所述步骤2中编码过程具体操作为:编码过程中使用三次卷积与三次maxpooling将图像一步步的处理为一个超维向量,来提取与压缩图片中所存的信息,最终输出一个一行的超维向量,再对特征向量进行特征聚类,完成图像特征的二值化,完成对图像的编码。
3.根据权利要求1所述的基于超维计算的危险驾驶行为检测方法,其特征在于,所述步骤2中编码后的特征向量进行处理时,将编码好的特征向量进行标准化处理一共得到ma·mb个超维向量,称为训练超维向量,记作zi(i=1,2…ma·mb),即ma个类别超维向量,每个类别超维向量中含有mb个超维向量;
4.根据权利要求1所述的基于超维计算的危险驾驶行为检测方法,其特征在于,所述步骤4中对训练测试好的样本进行adapthd再训练具体为:
5.根据权利要求1所述的基于超维计算的危险驾驶行为检测方法,其特征在于,所述步骤6中计算超维向量与类别超维向量之间的相似度,使用归一化的汉明距离来衡量相似度:
6.根据权利要求1所述的基于超维计算的危险驾驶行为检测方法,其特征在于,所述步骤6中计算超维向量与类别超维向量之间的相似度,使用余弦距离计算两个向量之间的相似度:
技术总结
本发明涉及目标检测领域,公开了一种基于超维计算的危险驾驶行为检测方法,收集危险驾驶图片,并将这些图片进行归类,并且标注危险驾驶类型;搭建超维计算模型,将不同类型的图像进行编码之后放入类别超维向量中,将类别超维向量与其标签一起存储;对数据样本进行超维计算的训练与测试;对训练测试好的样本进行AdaptHD再训练;将训练好的模型与三层的小型神经网络相结合,形成最终的危险驾驶行为检测模型;对最终的危险驾驶行为检测模型进行训练后,利用测试图片进行测试,再计算测试图片超维向量与类别超维向量的相似度。与现有技术相比,本发明使用超维计算外加小型神经网络的检测方法,在检测精确度可接受的范围内大大提高了效率,缩短的检测时间。
技术研发人员:张磊,沈骞,张宇翔,徐寅,李易,刘世豪,吴金花,臧建东
受保护的技术使用者:淮阴工学院
技术研发日:
技术公布日:2024/6/11
- 还没有人留言评论。精彩留言会获得点赞!