一种CTS试验并联六自由度机构构型优化方法与流程
本发明涉及一种cts风洞并联六自由度机构构型优化方法,用于cts试验风洞试验的飞行器模型的精确定位,属于cts风洞试验技术及其装备领域。
背景技术:
1、六自由度机构是cts试验系统的重要组成部分,目前国内外基本采用串联式六自由度机构作为cts试验系统的六自由度机构,中国航天空气动力技术研究院首次将6-ptrt并联式六自由度运动机构引入cts试验系统,6-ptrt并联式六自由度机构为六条刚性支链支撑动平台运动的桁架结构。
2、cts试验对精度、稳定性要求较高,故需要研究六自由度运动机构的静刚度特性以保证其定位性能。静刚度反映了在六自由度机构在外力或外力矩作用下由于机构弹性变形而引起导弹模型在基坐标系下的位移大小。目前采用的6-ptrt并联式六自由度机构,相比悬臂梁结构的串联六自由度机构,在大部分的工作空间内静刚度表现更为优异,在大部分机弹分离试验中可以获得高精度的试验数据,但是随着多体分离场景和分离复杂度的增加,分离模型分离马赫数、分离距离和分离角度大幅度扩大,经过试验发现6-ptrt并联六自由度机构存在刚度各向异性、局部刚度极弱的缺点,在工作空间边界区域6-ptrt并联式六自由度机构近似退化成单链支撑的悬臂梁,例如在大过载超声速机动的机弹分离试验中导弹模型在分离末期时处在工作空间边界区域难以稳定定位,给试验数据带来误差。并联机构的构件、关节较多,从而需要考虑的因素也很多,如驱动装置、连接铰链或关节及连杆本身的受力变形,外力作用和各零部件重力的影响等,因此cts试验并联六自由度的刚度提升是一个多因素耦合优化的问题。cts试验要求的大工作空间和小堵塞度会牺牲六自由度机构的部分刚度性能,在保证工作空间和堵塞度性能前提下增大并联式六自由度机构刚度是一大难点,cts试验并联六自由度的刚度提升需要同时考虑工作空间和堵塞度的指标需求,因此,cts试验并联六自由度的刚度提升还是一个多指标优化的问题。
3、常规的并联机构优化指标包括全局条件数、运动副刚度、平均平方灵巧度等,未发现针对cts试验要求的优质空间占比、堵塞度和最小刚度等指标开展优化,同时需要在全局刚度优化的基础上对局部刚度进行多层次优化。
4、针对cts试验并联六自由度机构,亟需提出一种cts试验并联六自由度机构构型优化方法,用于发展满足优质空间占比、堵塞度、全部和局部刚度要求的cts试验并联六自由度机构。
技术实现思路
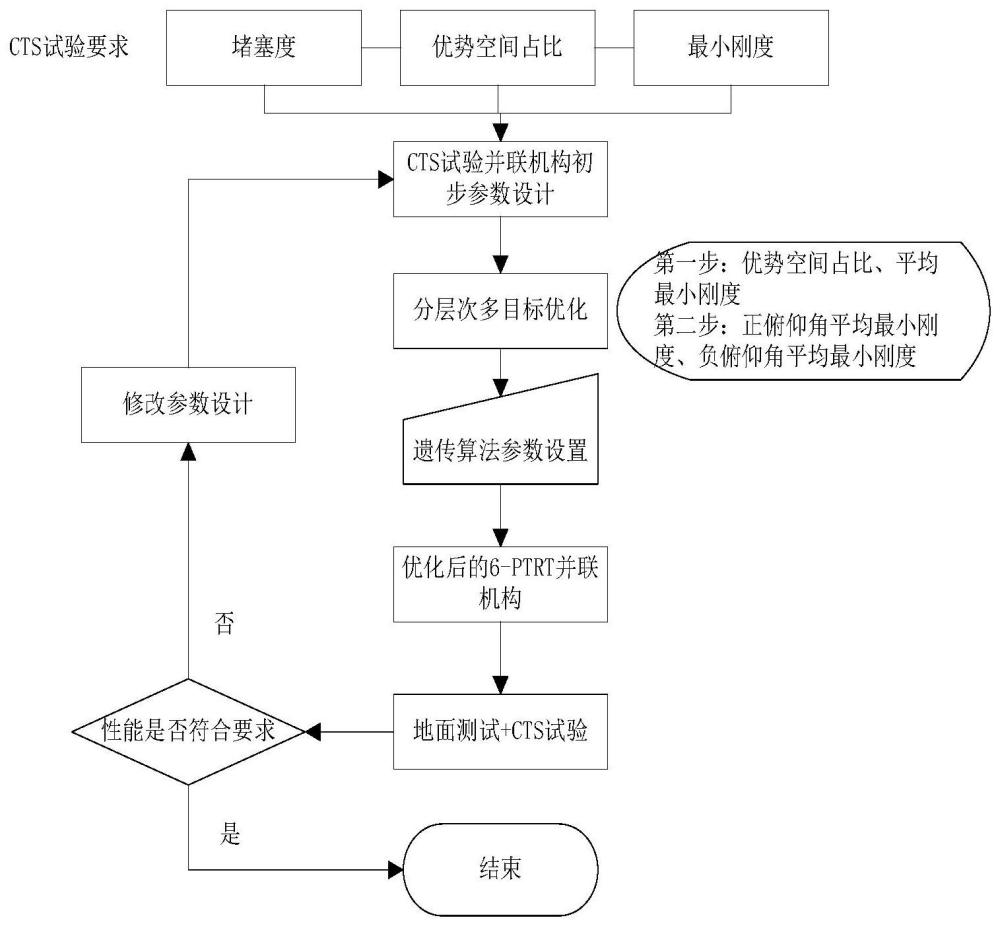
1、本发明为克服现有技术的不足,提出了一种cts试验并联六自由度机构构型优化方法,针对宽速域(ma0.4~ma4.0)、宽分离域和高精度cts试验的试验要求,对cts试验并联六自由度机构的堵塞度、优势空间占比和最小刚度性能开展多目标构型优化研究,在满足堵塞度、优势空间占比的前提下发展整体刚度和局部刚度均表现优异的cts试验并联六自由度机构。
2、本发明的技术方案为:
3、一种cts试验并联六自由度机构构型优化方法,动平台通过动平台铰点s铰接杆件,静平台通过静平台铰点铰接杆件;静平台和静平台之间通过尺寸一致的六根杆件连接;静平台的左右两侧对称,分别设置有三根水平导轨,六根水平导轨互相水平,六个静平台铰点分别通过滑块连接静平台的水平导轨;滑块能够沿静平台的水平导轨滑动;
4、所述构型优化方法,包括步骤:
5、1)cts试验对象为并联六自由度机构,选择并联六自由度机构的类型为6-ptrt并联机构;
6、2)设计cts试验并联六自由度机构的结构参数初值,获得6根杆件的杆长以及动平台六个铰点在静平台固连坐标系下的空间坐标;
7、3)确定6-ptrt并联机构的阻塞度ε2;
8、4)确定6-ptrt并联机构的优势空间占比;
9、5)获得动平台固连坐标系原点处6-ptrt并联机构的最小刚度;
10、6)采用遗传算法,针对优势空间占比和平均最小刚度的性能指标进行优化,调整杆长、动平台铰点s在动平台固连坐标系y轴的坐标,从而得到优化后的优势空间占比和平均最小刚度;
11、7)针对不同正负俯仰角对应的动平台固连坐标系原点处最小刚度的平均值作为优化目标进行优化,采用多目标优化方法,优化并联机构结构参数;获得优化后的最小刚度。
12、优选地,初始状态下,6-ptrt并联机构构型关于水平导轨的对称面对称,动平台固连坐标系xoy面和静平台固连坐标系xoy面重合;三轴方向一一对应。
13、优选地,6-ptrt并联机构的阻塞度ε2等于sm/sw和(6*sj)/sw两者中的的最大值;其中,sw为风洞试验段的横截面积。
14、优选地,6-ptrt并联机构的优势空间占比ε1=v6-ptrt/vcts
15、优选地,动平台固连坐标系原点处6-ptrt并联机构的刚度三轴分量中的最小值,作为最小刚度σmin。
16、优选地,步骤7)中的结构参数为动平台铰点s在动平台固连坐标系x轴的坐标,以及动平台铰点s在动平台固连坐标系z轴的坐标。
17、优选地,基于cts试验6-ptrt并联机构对称的特点,取单侧12个参数作为待优化结构参数,分别为杆长l1、l2、l3,以及单侧三个动平台铰点s1的空间坐标(x1,y1,z1)、动平台铰点s2的空间坐标(x2,y2,z2)、动平台铰点s3的空间坐标(x3,y3,z3)。
18、本发明与现有技术相比的优点如下:
19、1.针对cts试验并联六自由度机构,提出了cts试验要求下的并联机构优化指标组合,即堵塞度、优质空间占比和最小刚度,确定了cts试验并联机构的优化方向;
20、2.针对cts试验并联六自由度机构,采用分层次优化方法,将堵塞度指标转为动平台铰点坐标的约束条件,第一步针对优势空间占比和平均最小刚度的性能指标进行优化,第二步针对正负俯仰角的最小刚度的性能指标进行优化,采用多目标优化方法,优化并联机构结构参数,在保证优化指标满足cts试验要求的前提下,有效提高了优化效率,同时多层次优化局部最小刚度指标确保满足cts试验多场景下的刚度需求;
21、3.针对cts试验并联六自由度机构,提出了地面测试和cts试验测试cts试验并联六自由度机构性能的方法,保证cts试验并联六自由度机构满足实际需求。
技术特征:
1.一种cts试验并联六自由度机构构型优化方法,动平台通过动平台铰点s铰接杆件,静平台通过静平台铰点铰接杆件;静平台和静平台之间通过尺寸一致的六根杆件连接;静平台的左右两侧对称,分别设置有三根水平导轨,六根水平导轨互相水平,六个静平台铰点分别通过滑块连接静平台的水平导轨;滑块能够沿静平台的水平导轨滑动;
2.根据权利要求1所述的一种cts试验并联六自由度机构构型优化方法,其特征在于,初始状态下,6-ptrt并联机构构型关于水平导轨的对称面对称,动平台固连坐标系xoy面和静平台固连坐标系xoy面重合;三轴方向一一对应。
3.根据权利要求2所述的一种cts试验并联六自由度机构构型优化方法,其特征在于,6-ptrt并联机构的阻塞度ε2等于sm/sw和(6*sj)/sw两者中的的最大值;其中,sw为风洞试验段的横截面积。
4.根据权利要求3所述的一种cts试验并联六自由度机构构型优化方法,其特征在于,6-ptrt并联机构的优势空间占比ε1=v6-ptrt/vcts。
5.根据权利要求4所述的一种cts试验并联六自由度机构构型优化方法,其特征在于,动平台固连坐标系原点处6-ptrt并联机构的刚度三轴分量中的最小值,作为最小刚度σmin。
6.根据权利要求2~5任意之一所述的一种cts试验并联六自由度机构构型优化方法,其特征在于,步骤7)中的结构参数为动平台铰点s在动平台固连坐标系x轴的坐标,以及动平台铰点s在动平台固连坐标系z轴的坐标。
7.根据权利要求6所述的一种cts试验并联六自由度机构构型优化方法,其特征在于,基于cts试验6-ptrt并联机构对称的特点,取单侧12个参数作为待优化结构参数,分别为杆长l1、l2、l3,以及单侧三个动平台铰点s1的空间坐标(x1,y1,z1)、动平台铰点s2的空间坐标(x2,y2,z2)、动平台铰点s3的空间坐标(x3,y3,z3)。
技术总结
本发明公开了一种CTS试验并联六自由度机构构型优化方法,包括:对堵塞度、优势空间占比、最小刚度进行限制;设计结构参数初值;采用分层次优化方法,将堵塞度指标转为动平台铰点坐标的约束条件,针对优势空间占比和平均最小刚度的性能指标进行优化,针对正负俯仰角的平均最小刚度的性能指标进行优化,采用多目标优化方法,优化并联机构结构参数。本发明方法可以提供一种CTS试验并联六自由度机构的构型优化方法,实现六自由度机构的堵塞度、优势空间占比和最小刚度指标满足CTS试验需求。
技术研发人员:谢峰,魏忠武,祝令谱,王帅,陈天奇,张晨凯,王帅,董金刚,蒋文国
受保护的技术使用者:中国航天空气动力技术研究院
技术研发日:
技术公布日:2024/6/18
- 还没有人留言评论。精彩留言会获得点赞!