一种结构光三维重建方法和系统
本发明涉及三维视觉,尤其涉及一种结构光三维重建方法和系统。
背景技术:
1、结构光三维重建技术可以根据物体表面的三维形状和纹理信息进行三维重建。在结构光三维重建中投影仪需要投射例如二进制码图、彩色条纹图、正弦条纹图像。利用投射图像对物体表面进行编码,从而实现单一物体表面的三维重建。其中,结构光三维重建技术分为双目结构光和单目结构光。双目结构光是在双目立体视觉的基础上加入一个投影仪,而单目结构光则是将其中一个相机替换为投影仪。在单目结构光中,物体表面的三维重建主要有两种方法:一种是利用相机和投影仪之间的三角关系,采用三角立体模型进行重建;另一种是利用相机和投影仪光轴平行时的相高模型进行重建。
2、尽管现有技术能够实现表面纹理单一物体的三维重建,但仍存在校准工业相机和投影光机内外参数以及相高模型标定程序繁琐的问题。
技术实现思路
1、有鉴于此,本发明实施例的目的在于提供一种结构光三维重建方法和系统,以简化工业相机和投影光机之间的标定程序以及降低相高模型的几何约束难度。
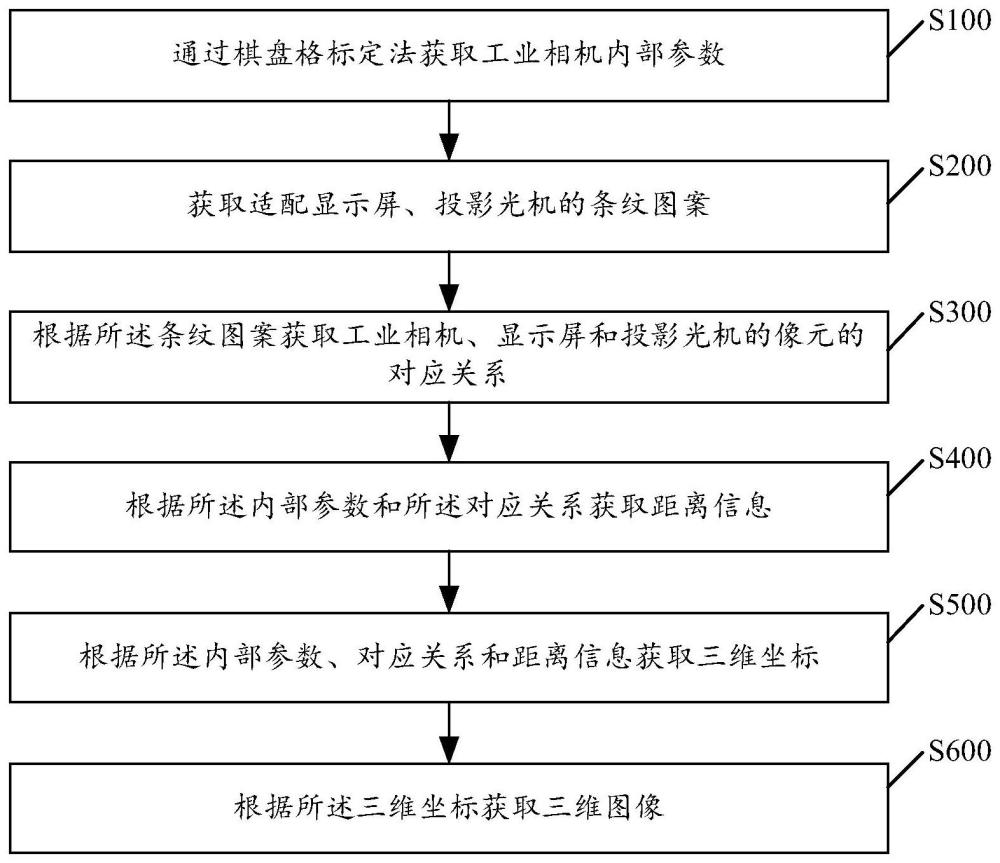
2、第一方面,本发明实施例提供一种结构光三维重建方法,所述方法包括:
3、通过棋盘格标定法获取工业相机内部参数;
4、获取适配显示屏、投影光机的条纹图案;
5、根据所述条纹图案获取工业相机、显示屏和投影光机的像元的对应关系;
6、根据所述内部参数和所述对应关系获取距离信息;
7、根据所述内部参数、对应关系和距离信息获取三维坐标;
8、根据所述三维坐标获取三维图像。
9、在一些实施例中,所述条纹图案包括格雷码图和相移图;
10、其中,所述获取适配显示屏、投影光机的条纹图案包括:
11、获取预定的矩形区域;
12、将所述矩形区域分别以横向或纵向等分为2m份,m为大于或等于1的正整数;
13、生成横向或纵向的m位格雷码图;
14、根据n步相移法获取相移图。
15、在一些实施例中,所述对应关系包括工业相机像元和显示屏像元之间的第一对应关系、工业相机像元和投影光机像元之间的第二对应关系以及显示屏像元和投影光机像元之间的第三对应关系;
16、其中,所述根据所述条纹图案获取工业相机、显示屏和投影光机的像元的对应关系包括:
17、通过所述显示屏显示所述条纹图案,对所述工业相机获取的显示屏的图像进行解码以获取第一绝对相位值,对所述显示屏显示的图像进行解码以获取第二绝对相位值,对所述第一绝对相位值和所述第二绝对相位值进行匹配以获取所述第一对应关系;
18、通过投影光机投影所述条纹图案,对所述工业相机获取的投影光机的图像进行解码以获取第三绝对相位值,对所述投影光机投影的图像进行解码以获取第四绝对相位值,对所述第三绝对相位值和所述第四绝对相位值进行匹配以获取所述第二对应关系;
19、根据所述第一对应关系和所述第二对应关系获取所述第三对应关系。
20、在一些实施例中,所述距离信息包括工业相机的光心到显示屏之间的第一距离、投影光机的光心到显示屏之间的第二距离以及工业相机光轴和投影光机光轴之间的第三距离;
21、其中,所述根据所述内部参数和所述对应关系获取距离信息包括:
22、根据所述内部参数获取所述工业相机的焦距和工业相机的主点对应的第一像元,根据所述第一对应关系确定所述第一像元对应的在显示屏中的第二像元,在工业相机像元中选择一个第三像元,根据所述第一对应关系确定所述第三像元对应的在显示屏中的第四像元,根据所述第一像元、第二像元、第三像元和第四像元获取所述第一距离;
23、根据所述内部参数获取所述投影光机的焦距和投影光机的主点对应的第五像元,根据第三对应关系确定所述第五像元对应的在显示屏中的第六像元,在所述投影光机像元中选择一个第七像元,根据所述第三对应关系确定所述第七像元对应的在显示屏中的第八像元,根据所述第五像元、第六像元、第七像元和第八像元获取所述第二距离;
24、根据第二像元和第六像元获取所述第三距离。
25、在一些实施例中,所述第一距离通过如下公式计算获取:
26、
27、其中,fc为工业相机的焦距,[uc0,vc0]为第一像元,[usc,vsc]为第二像元,[uc1,vc1]为第三像元,[us1,vs1]为第四像元,hc和vc为工业相机像元的长、宽尺寸,hs、vs为显示屏像元的长、宽尺寸。
28、在一些实施例中,所述第二距离通过如下公式计算获取:
29、
30、其中,fp为投影光机的焦距,[up0,vp0]为第五像元,[usp,vsp]为第六像元,[up1,vp1]为第七像元,[us2,vs2]为第八像元,hs、vs为显示屏像元的长、宽尺寸,hp、vp分别为投影光机像元的长、宽尺寸。
31、在一些实施例中,所述第三距离通过下公式计算获取:
32、
33、其中,[usc,vsc]为第二像元,[usp,vsp]为第六像元,hs、vs为显示屏像元的长、宽尺寸。
34、在一些实施例中,所述根据所述内部参数、对应关系和距离信息获取三维坐标包括:
35、确定待测点在投影光机中的第九像元和在工业相机中的第十像元;
36、根据所述对应关系获取所述第九像元对应的在显示屏中的第十一像元以及所述第十像元对应的在显示屏中的第十二像元;
37、根据所述距离信息、第九像元、第十像元、第十一像元和第十二像元获取所述待测点的三维坐标,所述三维坐标为待测点相对于所述显示屏的三维坐标。
38、在一些实施例中,所述三维坐标通过如下公式获取:
39、
40、其中,[up2,vp2]为第九像元,[uc2,vc2]为第十像元、[us3,vs3]为第十一像元,[us4,vs4]为第十二像元,[us5,vs5]为所述待测点垂直映射显示屏像元,hs、vs为显示屏像元的长、宽尺寸,lc为第一距离,lp为第二距离。
41、第二方面,本发明实施例提供了一种结构光三维重建系统,所述系统包括:
42、投影光机,用于投影结构光到显示屏或待测物体上;
43、工业相机,用于获取投影光机投影到显示屏的结构光以及投影光机投影到待测物体上的结构光;
44、显示屏,用于显示条纹图案或显示投影光机投影的结构光;
45、滑轨,用于调整投影光机或工业相机相对于所述显示屏的相对位置;
46、数据处理设备,包括存储器和处理器,所述存储器用于存储一条或多条计算机程序指令,其中,所述一条或多条计算机程序指令被所述处理器执行以实现如第一方面中任一项所述的方法。
47、本发明实施例的技术方案通过棋盘格标定法获取工业相机内部参数,获取适配显示屏、投影光机的条纹图案,根据所述条纹图案获取工业相机、显示屏和投影光机的像元的对应关系,根据所述内部参数和所述对应关系获取距离信息,根据所述内部参数、对应关系和距离信息获取三维坐标,根据所述三维坐标获取三维图像。由此,通过搭建结构光三维重建系统,从而简化工业相机和投影光机之间的标定程序以及降低相高模型的几何约束难度。
- 还没有人留言评论。精彩留言会获得点赞!