探针检测方法与流程
本发明涉及细胞检测,特别涉及探针检测方法。
背景技术:
1、显微操作系统通常是基于探针控制完成一系列流程操作,包括细胞注射、单细胞萃取及分析、微血管组装等。在进行单细胞注射及萃取、分析时,控制探针与细胞表面(包括细胞面及承载细胞的表面)接触判断是必不可少的。在单细胞注射时,若探针与细胞未接触则无法完成注射,而当探针与细胞过接触时,常常损伤细胞,导致细胞活性降低甚至凋亡。在单细胞萃取质谱分析时,需控制探针下降到细胞表面,当与细胞表面(细胞面/固化后的pdms)接触后立即停止运动,萃取完成后,进行质谱分析。如探针未与细胞进行接触则无法完成细胞的萃取、分析等,而当探针与细胞表面过接触时探针常常断裂进而导致质谱检测信号采集异常。因此,精确的判断探针与细胞表面的接触具有重大的研究意义。
2、近年来,随着显微操作技术的发展,探针识别、定位等已经取得了一定的进展,然而探针的接触检测方法仍处于起步阶段。现有的探针接触检测方法,通常需要系统附加辅助设备,如:传感器、显微镜头等,增加了系统的成本、复杂性,同时系统难以实现小型化;除此之外,多数研究人员是通过固定探针与细胞表面的初始距离,实现探针与细胞表面的接触,然而当细胞表面存在几微米偏差时探针将无法与细胞接触或针尖与细胞表面过接触,该方法不仅效率、成功率低,而且针尖易碎裂,进而导致质谱检测信号采集异常。
3、现有的方法主要采用传感器、双目视觉的方法判定探针与细胞的接触,但增加显微注射系统以及控制算法的复杂性,成本增加,占用较大空间;也有研究人员通过检测针尖滑移距离来判断针尖与底面的接触,但当底面为非光滑面时算法失效,适用性差。除此之外,还有人基于先验数据下降固定的距离,该方法在细胞表面存在几微米偏差时该方法失效,同时该方法不仅控制精度低,而且常常由于未接触细胞,导致系统成功率低。
技术实现思路
1、为解决上述现有技术方案中的不足,本发明提供了一种探针检测方法。
2、本发明的目的是通过以下技术方案实现的:
3、探针检测方法,所述探针检测方法为:
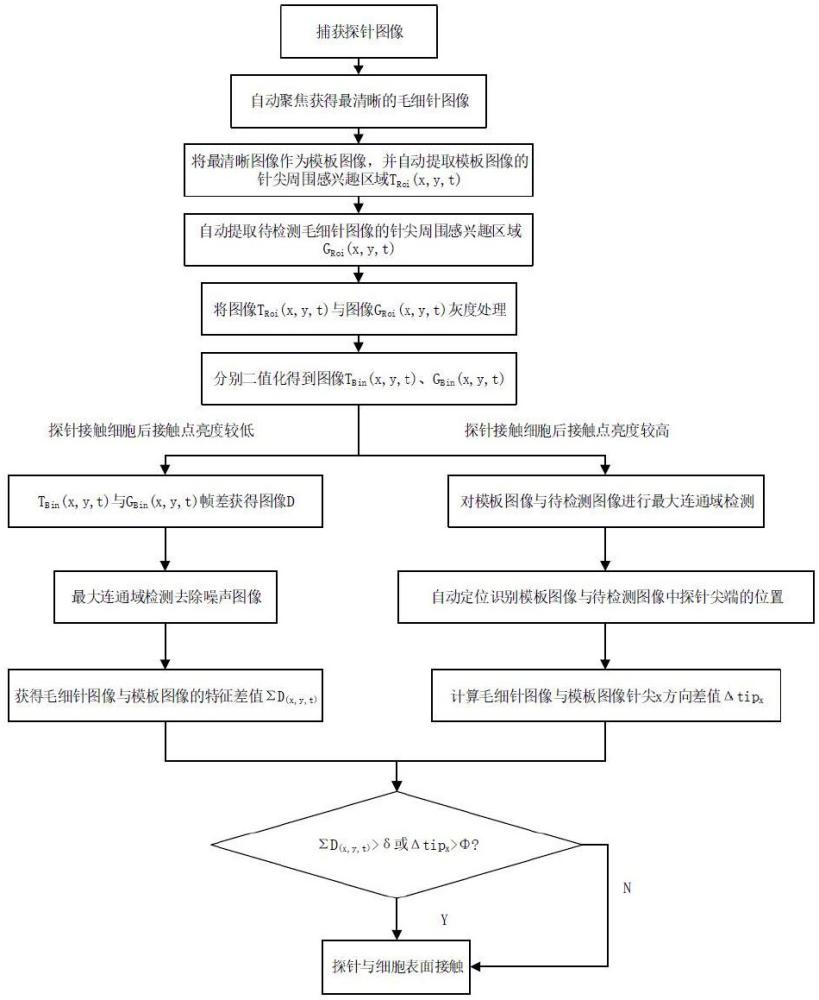
4、在探针向下移动中,获得探针的最清晰图像;将所述最清晰图像作为模板图像,提取所述探针针尖周围感兴趣区域troi(x,y,t);
5、在探针继续向下移动中,提取待检测探针图像针尖周围感兴趣区域groi(x,y,t);
6、对troi(x,y,t)和groi(x,y,t)分别进行灰度处理,之后利用otsu方法分别进行图像二值化,得到tboi(x,y,t)和gboi(x,y,t);
7、对tboi(x,y,t)和gboi(x,y,t)实施接触点亮度较低特征检测算法,获得特征差值∑d(x,y,t) (x∈l, y∈w) ,l、w分别是图像的长和宽;
8、,d(x,y,t)(x∈l, y∈w)为t时刻模板图像与待检测图像的差异图像,并去除噪声图像;
9、同时,对tboi(x,y,t)和gboi(x,y,t)实施接触点亮度较高特征检测算法,获得特征差值δtipx=tpipette(x,t0)×e-λt - rpipette(x,t);
10、tpipette(x,t0)为初始时刻t0模板图像探针x方向坐标,rpipette(x,t)为t时刻待检测图像探针x方向坐标,t为探针下降时间,t0为初始时刻,λ是衰减常数;
11、若特征差值∑d(x,y,t)或δtip中任一超过阈值,判断探针与细胞接触。
12、与现有技术相比,本发明具有的有益效果为:
13、1.快速、高效和精准地获得结果;
14、基于图像算法无需附加设备,能够快速、高效、高精度的检测到探针与细胞接触;
15、2.适用范围广;
16、解决目前显微操作领域中探针z方向接触检测算法中所有的缺陷,为显微操作奠定良好的基础;
17、3.稳定性好;
18、不依赖外在条件、提高系统工作效率及稳定性。
技术特征:
1.探针检测方法,其特征在于,所述探针检测方法为:
2.根据权利要求1所述的探针检测方法,其特征在于,特征差值∑d(x,y,t)的阈值,σ·d(x,y,t)是标准偏差,k是调节参数;
3.根据权利要求1所述的探针检测方法,其特征在于,利用最大连通域检测法去除噪声图像。
4.根据权利要求1所述的探针检测方法,其特征在于,在接触点亮度较高特征检测算法中,对tboi(x,y,t)和gboi(x,y,t)最大联通域检测后定位识别模板图像与待检测图像的探针坐标;
技术总结
本发明提供了探针检测方法,具体为:在探针向下移动中,获得探针的最清晰图像;将所述最清晰图像作为模板图像,提取所述探针针尖周围感兴趣区域T<subgt;Roi(x,y,t)</subgt;;在探针继续向下移动中,提取待检测探针图像针尖周围感兴趣区域G<subgt;Roi(x,y,t)</subgt;;对T<subgt;Roi(x,y,t)</subgt;和G<subgt;Roi(x,y,t)</subgt;分别进行灰度处理,之后利用OTSU方法分别进行图像二值化,得到T<subgt;Boi(x,y,t)</subgt;和G<subgt;Boi(x,y,t)</subgt;;对T<subgt;Boi(x,y,t)</subgt;和G<subgt;Boi(x,y,t)</subgt;实施接触点亮度较低特征检测算法,获得特征差值;同时,对T<subgt;Boi(x,y,t)</subgt;和G<subgt;Boi(x,y,t)</subgt;实施接触点亮度较高特征检测算法,获得特征差值Δtip<subgt;x</subgt;=T<subgt;pipette(x,t0)</subgt;×e<supgt;‑λt</supgt;‑R<subgt;pipette(x,t)</subgt;;若特征差值∑D<subgt;(x,y,t)</subgt;或Δtip中任一超过阈值,判断探针与细胞接触。本发明具有探测精确等优点。
技术研发人员:闻路红,陈安琪,闫明月,甘剑勤,洪欢欢
受保护的技术使用者:宁波华仪宁创智能科技有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!