定位方法、多相机系统、电子设备及存储介质与流程
本申请属于设备定位,具体涉及一种定位方法、多相机系统、电子设备及存储介质。
背景技术:
1、相关技术中,手术机器人在执行手术时,要对人体位姿及手术部位做精准的定位,现有的定位手段一般是采用多个反光球组合定位的方法,在实施中存在以下缺点:
2、1.多个反光球放在一个固定的支架上,体积较大,有时需要特殊的夹具辅助才能实现定位。
3、2.抗遮挡抗干扰能力较差,在手术过程中,反光球定位支架很容易被医护人员遮挡,导致实时的定位丢失。
技术实现思路
1、鉴于此,本申请的目的在于提供一种定位方法、多相机系统、电子设备及存储介质,以解决目标相机被部分遮挡,导致目标相机定位失败的问题。
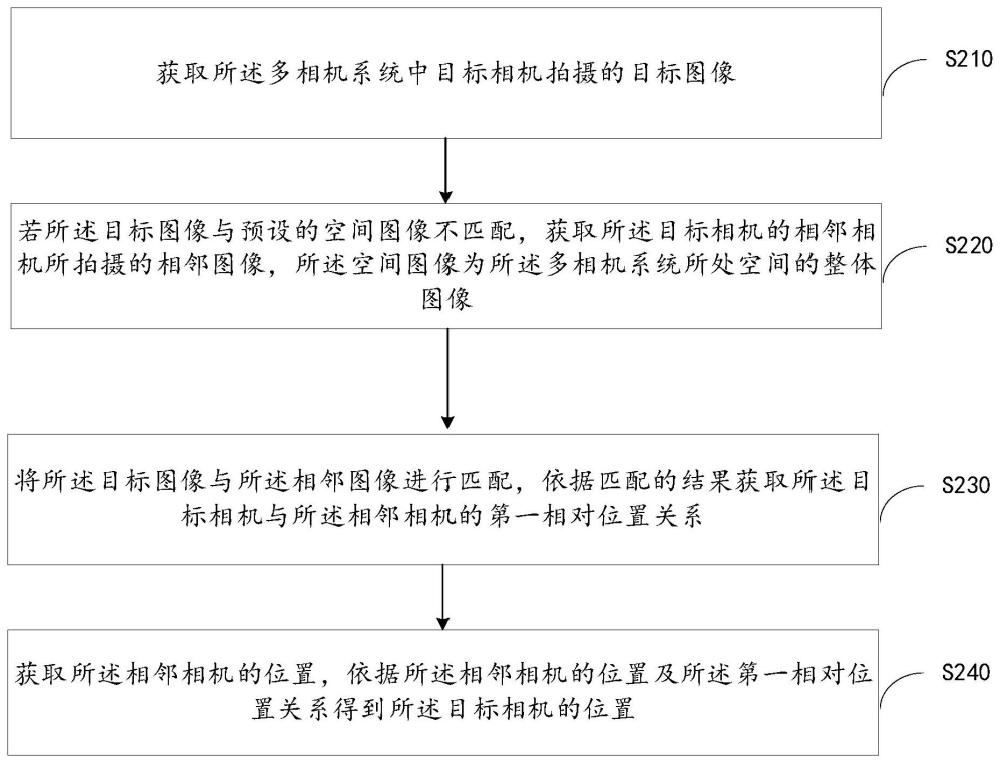
2、第一方面,本申请实施例提供了一种定位方法,所述方法应用于多相机系统,所述多相机系统包括多个不同视场的相机,每一所述相机的视场存在部分重叠,所述方法包括:获取所述多相机系统中目标相机拍摄的目标图像;若所述目标图像与预设的空间图像不匹配,获取所述目标相机的相邻相机所拍摄的相邻图像,所述空间图像为所述多相机系统所处空间的整体图像;将所述目标图像与所述相邻图像进行匹配,依据匹配的结果获取所述目标相机与所述相邻相机的第一相对位置关系;获取所述相邻相机的位置,依据所述相邻相机的位置及所述第一相对位置关系得到所述目标相机的位置。
3、上述定位方法引入了重叠视场,当目标图像与空间图像不匹配时,通过重叠特征,计算出目标相机与相邻相机的相对位置关系,依据相对位置关系实现目标相机的定位,避免了目标相机被部分遮挡,导致定位失败的问题。
4、在本申请一个可选实施例中,所述方法还包括:依据所述目标相机的位置,计算出所述目标相机的视场中手术部位的位置。
5、在本申请一个可选实施例中,所述空间图像包括所述空间内的多个特征及每一特征的绝对位置,所述方法还包括:将所述目标图像中的特征与所述空间图像中的特征进行匹配,得到多个匹配特征对;若所述多个匹配特征对满足预设的匹配条件时,则所述目标图像与所述空间图像匹配;若所述目标图像与所述空间图像匹配,获取所述多个匹配特征对中所述目标图像的特征在所述目标图像中的图像位置;依据所述目标图像的特征的图像位置及所述多个匹配特征对中所述空间图像的特征的绝对位置,计算得到所述目标相机的位置。
6、上述实施例中,依据目标图像与空间图像中配对的特征,可以快速、准确的计算出目标相机在空间中的绝对位置。
7、在本申请一个可选实施例中,所述将所述目标图像与所述相邻图像进行匹配,依据匹配的结果获取所述目标相机与所述相邻相机的第一相对位置关系,包括:将所述目标图像中的特征与所述相邻图像中的特征进行匹配,得到多个匹配特征对;获取所述多个匹配特征对中所述相邻图像的特征在所述相邻图像中的第一相对位置及所述多个匹配特征对中所述目标图像的特征在所述目标图像中的第二相对位置;依据每一匹配特征对的第一相对位置和第二相对位置,计算得到所述目标相机与所述相邻相机的第一相对位置关系。
8、在本申请一个可选实施例中,所述方法还包括:通过基准相机获取所述空间中指定区域的图像,生成所述空间图像,所述指定区域由用户设置,所述指定区域大于或等于所述多相机系统的视场;获取所述基准相机在所述空间中的绝对位置;依据所述基准相机的绝对位置,计算出所述空间图像中每一特征的绝对位置。
9、上述实施例提供了一种空间图像的建立方法,可以快速、简单的建立空间图像。
10、在本申请一个可选实施例中,所述获取所述相邻相机的位置,包括:将所述相邻图像中的特征与所述空间图像中的特征进行匹配,得到多个匹配特征对;若所述多个匹配特征对满足预设的匹配条件时,则所述目标图像与所述空间图像匹配;若所述相邻图像与所述空间图像匹配,获取所述多个匹配特征对中所述相邻图像的特征在所述相邻图像中的图像位置;依据所述目标图像的特征的图像位置及所述多个匹配特征对中所述空间图像的特征的绝对位置,计算得到所述相邻相机的位置。
11、在本申请一个可选实施例中,若所述相邻图像与所述空间图像不匹配,所述方法还包括:获取与所述相邻相机临近的临近相机所拍摄的临近图像;将所述临近图像与所述相邻图像进行匹配,依据匹配的结果获取所述临近相机与所述相邻相机的第二相对位置关系;获取所述临近相机的位置,依据所述临近相机的位置及所述第二相对位置关系得到所述临近相机的位置。
12、第二方面,本申请实施例提供了一种多相机系统,所述多相机系统包括多个不同视场的相机,每一所述相机的视场存在部分重叠,所述多相机系统还包括:第一获取模块,用于获取所述多相机系统中目标相机拍摄的目标图像;第二获取模块,用于若所述目标图像与预设的空间图像不匹配,获取所述目标相机的相邻相机所拍摄的相邻图像,所述空间图像为所述多相机系统所处空间的整体图像;匹配模块,用于将所述目标图像与所述相邻图像进行匹配,依据匹配的结果获取所述目标相机与所述相邻相机的第一相对位置关系;计算模块,用于获取所述相邻相机的位置,依据所述相邻相机的位置及所述第一相对位置关系得到所述目标相机的位置。
13、第三方面,本申请实施例提供了一种电子设备,包括:存储器和处理器,所述处理器与所述存储器连接;所述存储器,用于存储程序;所述处理器,用于调用存储于所述存储器中的程序,以执行第一方面中任一项所述的方法。
14、第四方面,本申请实施例提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器运行时,执行第一方面中任一项所述的方法。
15、本申请的其他特征和优点将在随后的说明书阐述。本申请的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
技术特征:
1.一种定位方法,其特征在于,所述方法应用于多相机系统,所述多相机系统包括多个不同视场的相机,每一所述相机的视场存在部分重叠,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,所述空间图像包括所述空间内的多个特征及每一特征的绝对位置,所述方法还包括:
4.根据权利要求1所述的方法,其特征在于,所述将所述目标图像与所述相邻图像进行匹配,依据匹配的结果获取所述目标相机与所述相邻相机的第一相对位置关系,包括:
5.根据权利要求1所述的方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,所述获取所述相邻相机的位置,包括:
7.根据权利要求6所述的方法,其特征在于,若所述相邻图像与所述空间图像不匹配,所述方法还包括:
8.一种多相机系统,其特征在于,所述多相机系统包括多个不同视场的相机,每一所述相机的视场存在部分重叠,所述多相机系统还包括:
9.一种电子设备,其特征在于,包括:存储器和处理器,所述处理器与所述存储器连接;
10.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,所述计算机程序被处理器运行时,执行如权利要求1-7中任一项所述的方法。
技术总结
本申请提供一种定位方法、多相机系统、电子设备及存储介质,其中,所述方法包括:获取所述多相机系统中目标相机拍摄的目标图像;若所述目标图像与预设的空间图像不匹配,获取所述目标相机的相邻相机所拍摄的相邻图像,所述空间图像为所述多相机系统所处空间的整体图像;将所述目标图像与所述相邻图像进行匹配,依据匹配的结果获取所述目标相机与所述相邻相机的第一相对位置关系;获取所述相邻相机的位置,依据所述相邻相机的位置及所述第一相对位置关系得到所述目标相机的位置,引入了重叠视场,通过重叠特征,计算出目标相机与相邻相机的相对位置关系,依据相对位置关系实现目标相机的定位,避免了目标相机被部分遮挡,导致定位失败的问题。
技术研发人员:苏至钒,潘晶,夏知拓
受保护的技术使用者:上海钛米机器人股份有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!