解码方法、编码方法、解码装置及编码装置与流程
本公开涉及解码方法、编码方法、解码装置及编码装置。
背景技术:
1、在用于汽车或者机器人自主动作的计算机视觉、地图信息、监视、基础设施查点或者影像分发等广泛的领域中,有效利用三维数据的装置或者服务预计在今后得到普及。通过测距仪等距离传感器、立体相机或者多个单目相机的组合等各种方法来取得三维数据。
2、作为三维数据的表现方法之一,有通过三维空间内的点群来表现三维构造的形状的被称为点云的表现方法。在点云中,存放有点群的位置和颜色。点云虽然预想会成为三维数据的表现方法的主流,但点群的数据量非常大。因此,在三维数据的积蓄或者传送中,与二维的动态图像(作为一例有通过mpeg进行了标准化的mpeg-4avc或者hevc等)同样,需要通过编码对数据量进行压缩。
3、另外,关于点云的压缩,通过进行与点云关联的处理的公开库(点云库(pointcloud library))等提供了部分的支持。
4、另外,已知使用三维的地图数据对位于车辆周边的设施进行检索并显示的技术(例如参照专利文献1)。
5、在先技术文献
6、专利文献
7、专利文献1:国际公布第2014/020663号
技术实现思路
1、发明所要解决的课题
2、在三维数据的编码处理及解码处理中,希望提高编码效率以及减少由解码装置处理的数据量。
3、本公开的目的在于,提供能够提高编码效率或者减少由解码装置处理的数据量的解码方法、编码方法、解码装置或者编码装置。
4、用于解决课题的手段
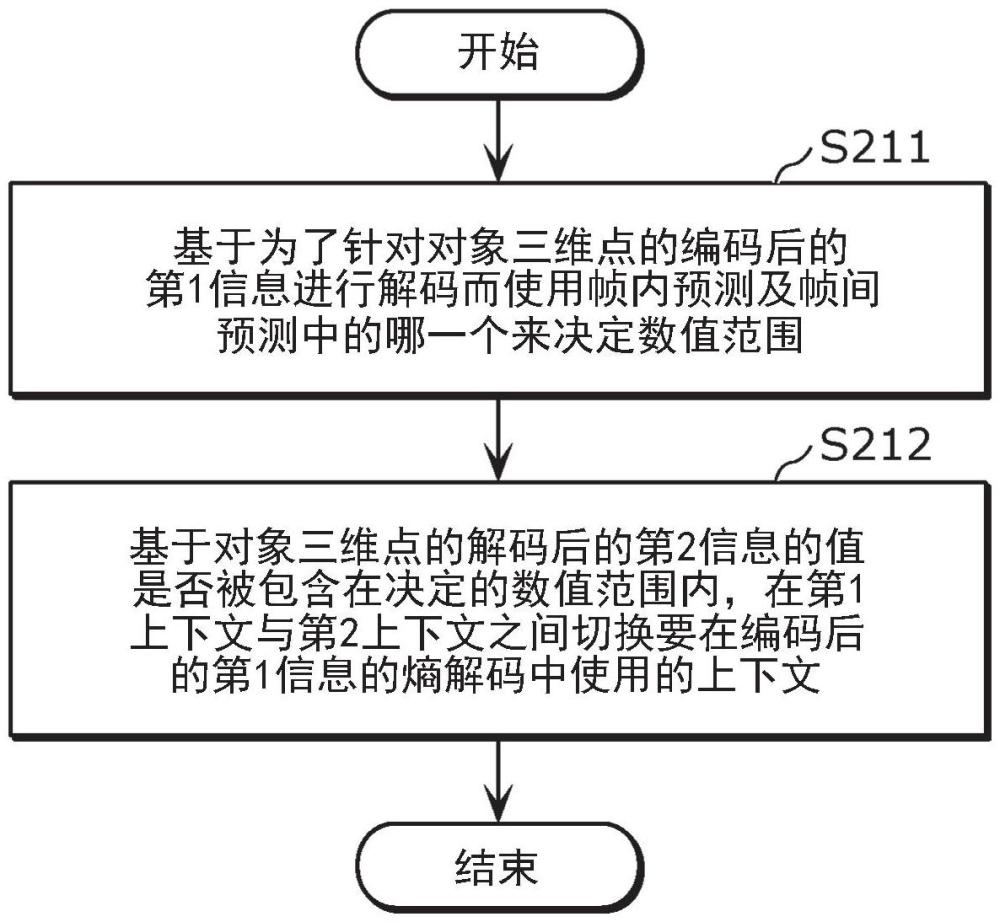
5、在本公开的一个方式所涉及的三维数据解码方法中,基于为了针对对象三维点的编码后的第1信息进行解码而使用帧内预测及帧间预测中的哪一个,来决定数值范围,基于所述对象三维点的解码后的第2信息的值是否被包含在决定的所述数值范围内,在第1上下文与第2上下文之间切换要在所述编码后的第1信息的熵解码中使用的上下文。
6、在本公开的一个方式所涉及的三维数据编码方法中,基于为了针对对象三维点的第1信息进行编码而使用帧内预测及帧间预测中的哪一个,来决定数值范围,基于所述对象三维点的第2信息的值是否被包含在决定的所述数值范围内,在第1上下文与第2上下文之间切换要在所述第1信息的熵编码中使用的上下文。
7、发明效果
8、本公开能够提供能够提高编码效率或者减少由解码装置处理的数据量的解码方法、编码方法、解码装置或者编码装置。
技术特征:
1.一种解码方法,
2.如权利要求1所述的解码方法,
3.如权利要求2所述的解码方法,
4.如权利要求3所述的解码方法,
5.如权利要求1所述的解码方法,
6.如权利要求1所述的解码方法,
7.如权利要求6所述的解码方法,
8.如权利要求3所述的解码方法,
9.一种编码方法,
10.如权利要求9所述的编码方法,
11.如权利要求10所述的编码方法,
12.如权利要求11所述的编码方法,
13.如权利要求9所述的编码方法,
14.如权利要求9所述的编码方法,
15.如权利要求14所述的编码方法,
16.如权利要求11所述的编码方法,
17.一种解码装置,具备:
18.一种编码装置,具备:
技术总结
解码方法基于为了针对对象三维点的编码后的第1信息进行解码而使用帧内预测及帧间预测中的哪一个,来决定数值范围(S211),基于对象三维点的解码后的第2信息的值是否被包含在决定的数值范围内,在第1上下文与第2上下文之间切换要在编码后的第1信息的熵解码中使用的上下文(S212)。例如也可以是,在决定(S211)中,决定用于确定数值范围的上限值及下限值的阈值,在切换(S212)中,将决定的阈值与解码后的第2信息的绝对值比较,来切换要在编码后的第1信息的熵解码中使用的上下文。
技术研发人员:西孝启,杉尾敏康,井口贺敬
受保护的技术使用者:松下电器(美国)知识产权公司
技术研发日:
技术公布日:2024/10/10
- 还没有人留言评论。精彩留言会获得点赞!