一种基于村落特征描述的几何拓扑匹配定位方法与流程
本发明涉及景象匹配定位,尤其涉及一种基于村落特征描述的几何拓扑匹配定位方法。
背景技术:
1、近年来,卫星遥感技术和计算机视觉技术取得了重大进展。景象匹配定位技术利用地面景象唯一性的特点,匹配无人机航拍图像和卫星遥感图像来获取无人机位置。该技术不依赖外部系统,具备更高的自主性和克服累计误差的能力。
2、无人机航拍图像和卫星遥感图像具备两个显著特点,一是图像实际覆盖尺寸差异巨大,二是成像机理不同会导致图像的内容、清晰度、颜色等具有较大差别。现有技术的景象匹配定位方法针对无人机航拍图像实际覆盖尺寸小,与覆盖尺寸大的遥感图像进行匹配会导致运算量大、效率低的问题,提出了基于区域特征的粗匹配、基于运动特性的图像切片等算法。但是,可能因为预选数据错误导致最终定位失败。另外,图像成像机理不同会导致两种图像中同一位置提取特征的表现也有较大差别,现有方法中特征提取方法趋于复杂化,使算法适应性降低。综上所述,现有的景象匹配技术存在一定的局限性,影响无人机定位的效率和准确性。
技术实现思路
1、为了解决上述问题,本发明提供了一种基于村落特征描述的几何拓扑匹配定位方法,该方法利用环境中的建筑、道路等要素具有相对稳定的特性,设计村落特征描述并构建村落与路网交点的几何拓扑关系,能够实现快速定位。
2、为实现上述目的,本发明采用的技术方案如下:
3、一种基于村落特征描述的几何拓扑匹配定位方法,包括以下步骤:
4、步骤1,以遥感图像中的村落为目标,形成包含村落几何特征描述、村落与路网交点几何拓扑关系的底图文件;
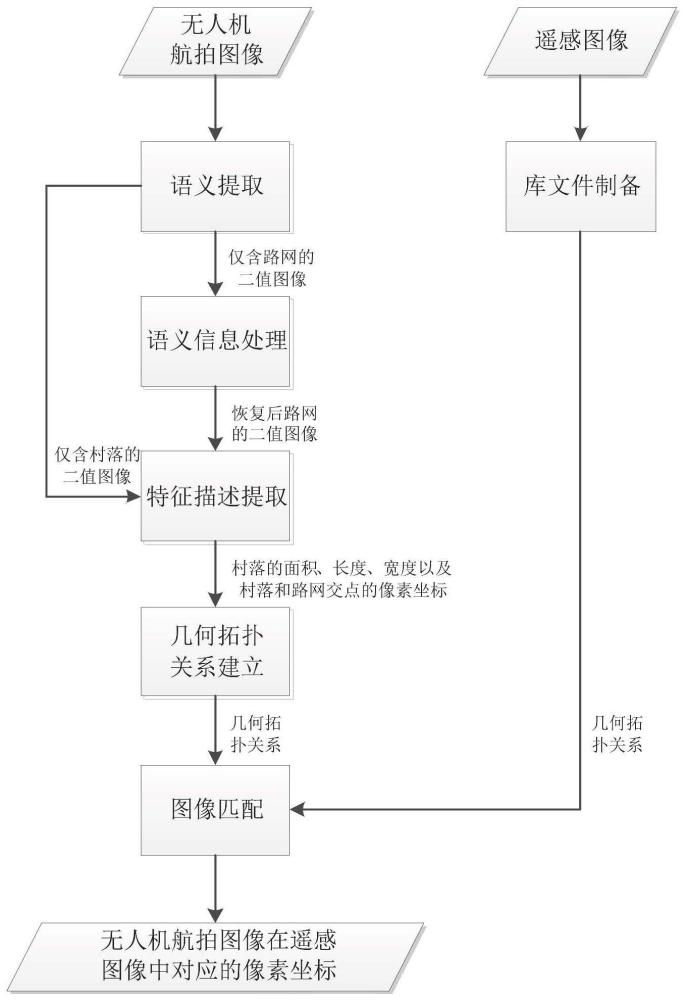
5、步骤2,使用语义提取算法在无人机航拍图像中标记出村落、路网,分别得到仅含村落和仅含路网的二值图像,并采用路网还原算法恢复路网信息;
6、步骤3,识别路网交点,并提取路网交点像素坐标;
7、步骤4:计算无人机航拍图像中的村落几何特征及其中心像素坐标,并形成每个村落的特征描述及其几何拓扑关系;
8、步骤5:基于每个村落的特征描述及其几何拓扑关系和底图文件,采用几何拓扑匹配算法进行匹配,最终得到无人机航拍图像像素中心在遥感图像中的像素坐标。
9、进一步地,步骤1的具体方式为:
10、步骤1.1,使用labelme标注工具在遥感图像中标记出村落和路网交点;
11、步骤1.2,基于opencv库提取村落、路网交点的边缘,在此基础上计算得到村落的像素面积、像素长度、像素宽度和村落中心及路网交点的像素坐标,并根据图像分辨率计算得到村落的实际几何尺寸;
12、步骤1.3,根据无人机航拍图像对应的实际视野范围确定几何拓扑的范围阈值ε,并计算村落与村落间、村落与路网交点之间的几何拓扑关系,包括距离和角度,其中,距离根据像素距离和图像分辨率计算得到,角度以北偏东为正,取值范围为0°~360°。
13、进一步地,步骤2中,采用路网还原算法恢复路网信息的具体方式为:
14、步骤2.1,基于已得到的仅含路网信息的二值图像,采用膨胀腐蚀算法将断开的路网交点重新连接;
15、步骤2.2,采用像素图像骨架提取算法细化路网。
16、进一步地,步骤3中提取路网交点像素坐标的具体方式为:
17、步骤3.1,基于harris角点检测算法得到路网图像中的路网交点;
18、步骤3.2,针对全部路网交点进行dbscan聚类,将各类别的聚类中心坐标定义为路网交点的像素坐标。
19、进一步地,步骤4中,形成每个村落的特征描述及其几何拓扑关系的具体方式为:
20、步骤4.1,基于已得到的仅含村落信息的二值图像,使用opencv实现边缘提取后,计算得到村落中心像素坐标,并结合图像分辨率计算得到每个村落对应的实际面积、长度和宽度;
21、步骤4.2,计算当前视野范围内的每个村落与其它村落间的几何拓扑;
22、步骤4.3,计算当前视野范围内的每个村落与每个路网交点间的几何拓扑。
23、进一步地,步骤5的具体方式为:
24、步骤5.1,将无人机航拍图像中的村落按村落中心像素坐标与图像像素中心的距离由小到大的顺序排列,形成无人机航拍图像村落队列;
25、步骤5.2,遍历无人机航拍图像村落队列,选取村落tk(n);
26、步骤5.3,遍历底图中的村落,找到与村落tk(n)面积差、长度差、宽度差均小于第一阈值的村落tt(k);
27、步骤5.4,将村落tk(n)与其它村落间的几何拓扑关系、村落tk(n)与每个路网交点间的几何拓扑关系分别和村落tt(k)对应的几何拓扑关系进行比对,若距离关系和角度关系均在第二阈值范围内,则判断村落/路网交点成功匹配;
28、步骤5.5,若村落/路网交点成功匹配对数大于第三阈值,则认为村落tk(n)和tt(k)已成功匹配,并获得村落tk(n)在遥感图像中的像素坐标,若未成功匹配,则返回步骤5.3;
29、步骤5.6,遍历底图中的所有村落后若均未匹配成功,则返回步骤5.2,选取下一个村落;
30、步骤5.7,遍历无人机航拍图像村落队列后若均未匹配成功,则匹配失败,更新当前无人机航拍图像,进行下次匹配。
31、与现有技术相比,本发明的有益效果在于:
32、1、本发明利用村落特征描述可以实现快速筛选符合条件的村落,利用几何拓扑关系作为约束可以进一步快速实现无人机在遥感地图上的像素定位。
33、2、本发明利用建筑、道路具有相对稳定特性的要素,避免了因图像成像机理不同带来的问题,提高了算法的适应性。
34、3、本发明针对语义提取算法提取路网数据不完整的情况,提出路网恢复及交点提取算法,避免了语义提取算法复杂化。
技术特征:
1.一种基于村落特征描述的几何拓扑匹配定位方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种基于村落特征描述的几何拓扑匹配定位方法,其特征在于,步骤1的具体方式为:
3.如权利要求1所述的一种基于村落特征描述的几何拓扑匹配定位方法,其特征在于,步骤2中,采用路网还原算法恢复路网信息的具体方式为:
4.如权利要求1所述的一种基于村落特征描述的几何拓扑匹配定位方法,其特征在于,步骤3中提取路网交点像素坐标的具体方式为:
5.如权利要求1所述的一种基于村落特征描述的几何拓扑匹配定位方法,其特征在于,步骤4中,形成每个村落的特征描述及其几何拓扑关系的具体方式为:
6.如权利要求1所述的一种基于村落特征描述的几何拓扑匹配定位方法,其特征在于,步骤5的具体方式为:
技术总结
本发明公开了一种基于村落特征描述的几何拓扑匹配定位方法,涉及景象匹配定位技术领域。本发明包括:形成包含村落特征描述、村落与路网交点几何拓扑关系的底图文件,在无人机航拍图像中标记出村落、路网,分别得到仅含村落和仅含路网的二值图像,采用路网还原算法恢复路网信息,计算无人机航拍图像中村落面积、长度、宽度及其中心像素坐标,形成每个村落的特征描述及其几何拓扑关系,采用几何拓扑匹配算法进行匹配,最终得到无人机航拍图像像素中心在遥感图像中的像素坐标。本发明可以实现快速筛选符合条件的村落,快速实现无人机在遥感地图上的像素定位,避免了因图像成像机理不同带来的问题,提高了算法的适应性。
技术研发人员:张宁,邸成良,杨建永,柴兴华,陈彦桥,李晨阳,蔡迎哲,张泽勇,李森磊,李雅,郝亦豪,张秋阳
受保护的技术使用者:中国电子科技集团公司第五十四研究所
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!