基于多源数据融合的智能设备手势识别方法与流程
本发明涉及图像增强,具体涉及一种基于多源数据融合的智能设备手势识别方法。
背景技术:
1、手势识别是指通过智能设备对用户的手部动作进行感知和理解,从而实现与设备的交互。传统的手势识别方法通常只依靠单一的数据源进行手势分析,存在识别准确性低、容易受到环境干扰等问题,故为了提高手势识别准确性,需要从多个设备传感器的多源数据中提取有效特征进行手势分析。
2、手势识别需要从多源的图像数据中提取有用的特征进行分析,但在现实的复杂环境中可能难以提取有效的特征进行手势识别,导致识别准确率降低,故需要对图像进行增强处理;直方图均衡化是一种现有传统的图像增强方法,该图像增强方法是针对全局进行增强的,可能会出现过曝或降低有效特征的对比度的情况,使得图像增强效果不佳;导致图像中部分重要信息丢失,影响手势识别的准确性。
技术实现思路
1、为了解决上述现有图像增强方法可能导致图像重要信息丢失,影响手势识别的准确性的技术问题,本发明的目的在于提供一种基于多源数据融合的智能设备手势识别方法,所采用的技术方案具体如下:
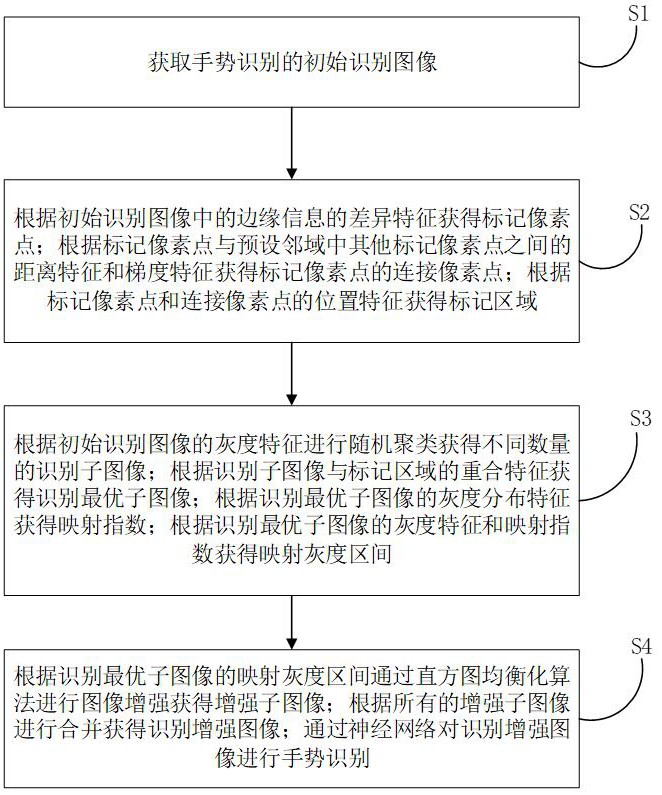
2、获取手势识别的初始识别图像;
3、根据所述初始识别图像中的边缘信息的差异特征获得标记像素点;根据所述标记像素点与预设邻域中其他标记像素点之间的距离特征和梯度特征获得标记像素点的连接像素点;根据所述标记像素点和所述连接像素点的位置特征获得标记区域;
4、根据所述初始识别图像的灰度特征进行随机聚类获得不同数量的识别子图像;根据所述识别子图像与所述标记区域的重合特征获得识别最优子图像;根据所述识别最优子图像的灰度分布特征获得映射指数;根据所述识别最优子图像的灰度特征和所述映射指数获得映射灰度区间;
5、根据所述识别最优子图像的所述映射灰度区间通过直方图均衡化算法进行图像增强获得增强子图像;根据所有的增强子图像进行合并获得识别增强图像;通过神经网络对所述识别增强图像进行手势识别。
6、进一步地,所述根据所述初始识别图像中的边缘信息的差异特征获得标记像素点的步骤包括:
7、通过canny边缘检测算法与预设阈值区间对所述初始识别图像进行不同程度的边缘检测,获得不同的边缘检测图像;计算所述初始识别图像中的任意像素点在所有边缘检测图像中作为边缘像素点的频率,获得标记指数;当所述任意像素点的标记指数超过预设标记阈值时,所述任意像素点为标记像素点。
8、进一步地,所述根据所述标记像素点与预设邻域中其他标记像素点之间的距离特征和梯度特征获得标记像素点的连接像素点的步骤包括:
9、计算所述标记像素点与预设邻域内的任意其他标记像素点之间的欧氏距离并负相关映射,获得紧凑表征值;计算所述标记像素点与预设邻域内的任意其他标记像素点之间的梯度方向的余弦相似度并归一化,获得夹角表征值;计算所述紧凑表征值和所述夹角表征值的乘积,获得所述任意其他标记像素点的连接特征值;将数值最大的连接特征值对应的所述任意其他标记像素点作为所述标记像素点的连接像素点。
10、进一步地,所述根据所述标记像素点和所述连接像素点的位置特征获得标记区域的步骤包括:
11、将所述初始识别图像中所有标记像素点和对应的连接像素点进行连接,连接后组成不同的闭合区域作为所述标记区域。
12、进一步地,所述根据所述初始识别图像的灰度特征进行随机聚类获得不同数量的识别子图像的步骤包括:
13、根据初始识别图像中像素点的灰度值通过k-means聚类算法进行不同k值的聚类,所述k值为聚类中心的数量,k值的范围为预设聚类中心数量区间,对于任意k值的聚类结果,根据所述聚类结果中任意聚类簇的像素点以及像素点的位置获得识别子图像,所述聚类结果对应的识别子图像的数量为k值。
14、进一步地,所述根据所述识别子图像与所述标记区域的重合特征获得识别最优子图像的步骤包括:
15、计算所述聚类结果中所述识别子图像与所述标记区域的平均交并比,获得所述聚类结果的聚类效果表征值,将最大的聚类效果表征值对应的聚类结果的识别子图像作为所述识别最优子图像。
16、进一步地,所述根据所述识别最优子图像的灰度分布特征获得映射指数的步骤包括:
17、根据所述识别最优子图像中像素点的灰度值计算信息熵并负相关映射,获得所述识别最优子图像的映射指数。
18、进一步地,所述根据所述识别最优子图像的灰度特征和所述映射指数获得映射灰度区间的步骤包括:
19、计算所述识别最优子图像的灰度最大值与灰度最小值的差值,获得灰度范围值;计算常数256与所述灰度范围值的差值,获得调节范围值;计算所述调节范围值与所述映射指数的乘积,获得映射范围值;计算所述映射范围值与常数2的比值,获得映射调整值;
20、计算所述识别最优子图像的灰度最大值与所述映射调整值的和值并向下取整,获得区间最大值;当所述区间最大值不超过常数255时,所述映射灰度区间的最大值为所述区间最大值,否则为常数255;
21、计算所述识别最优子图像的灰度最小值与所述映射调整值的差值并向下取整,获得区间最小值;当所述区间最小值不低于常数0时,所述映射灰度区间的最小值为所述区间最小值,否则为常数0。
22、本发明具有如下有益效果:
23、在本发明中,获得标记像素点和对应连接像素点能够将初始识别图像中表示不同特征的区域进行划分;获得的标记区域能够表征初始识别图像中不同的特征区域,进而为初始识别图像的聚类效果进行评估;根据识别子图像和标记区域能够基于初始识别图像中的灰度分布特征和区域相似特征获得识别最优子图像,基于识别最优子图像进行图像增强能够提高增强效果。获得映射指数能够表征识别最优子图像中的灰度分布的均匀程度,从而更准确地获得直方图均衡化需要映射的灰度区间;获得映射灰度区间能够更准确地对识别最优子图像进行直方图均衡化,提高图像增强效果,避免图像过曝或降低有效特征的对比度;根据增强子图像获得识别增强图像能够提高手势识别的准确性。
技术特征:
1.一种基于多源数据融合的智能设备手势识别方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的一种基于多源数据融合的智能设备手势识别方法,其特征在于,所述根据所述初始识别图像中的边缘信息的差异特征获得标记像素点的步骤包括:
3.根据权利要求1所述的一种基于多源数据融合的智能设备手势识别方法,其特征在于,所述根据所述标记像素点与预设邻域中其他标记像素点之间的距离特征和梯度特征获得标记像素点的连接像素点的步骤包括:
4.根据权利要求1所述的一种基于多源数据融合的智能设备手势识别方法,其特征在于,所述根据所述标记像素点和所述连接像素点的位置特征获得标记区域的步骤包括:
5.根据权利要求1所述的一种基于多源数据融合的智能设备手势识别方法,其特征在于,所述根据所述初始识别图像的灰度特征进行随机聚类获得不同数量的识别子图像的步骤包括:
6.根据权利要求5所述的一种基于多源数据融合的智能设备手势识别方法,其特征在于,所述根据所述识别子图像与所述标记区域的重合特征获得识别最优子图像的步骤包括:
7.根据权利要求1所述的一种基于多源数据融合的智能设备手势识别方法,其特征在于,所述根据所述识别最优子图像的灰度分布特征获得映射指数的步骤包括:
8.根据权利要求1所述的一种基于多源数据融合的智能设备手势识别方法,其特征在于,所述根据所述识别最优子图像的灰度特征和所述映射指数获得映射灰度区间的步骤包括:
技术总结
本发明涉及图像增强技术领域,具体涉及一种基于多源数据融合的智能设备手势识别方法;根据初始识别图像中的边缘信息的差异特征获得标记像素点;根据标记像素点之间的距离特征和梯度特征获得标记区域;根据初始识别图像的灰度特征进行随机聚类获得识别子图像;根据识别子图像与标记区域的重合特征获得识别最优子图像;根据识别最优子图像的灰度分布特征获得映射指数和映射灰度区间。本发明根据识别最优子图像的映射灰度区间通过直方图均衡化获得增强子图像和识别增强图像,通过神经网络对识别增强图像进行手势识别;提高了图像增强效果和手势识别的准确性。
技术研发人员:徐杰,张威,张贤,张小平,蔡晓平,蔡鸿辉
受保护的技术使用者:深圳市阿龙电子有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!