基于任务理解的人-智能体集群协同与交互控制系统及方法与流程
本发明涉及人机协作领域,尤其涉及一种基于任务理解的人-智能体集群协同与交互控制系统及方法。
背景技术:
0、技术背景
1、当前,战争模式逐渐转向机器模式。高自主水平高能力的机器人可以显著提高效率在对敌毁伤、态势构建、敌情监视方面展示出巨大的应用潜力。
2、目前,单个智能体具有能力不足的缺陷,同时针对这种高动态、高复杂、高信息不确定的任务,智能体的自主水平依旧较低,无法自主完成整个任务。同时,操作员在过程中的过于密集的出现将会成为地方的重点打击区域。因此,如何实现更少的操作员控制更多的装备将会显著的降低过程中操作员的伤亡率,同时大量机械化、自主化的装备的使用将会大大提高军队战斗力,对于降低成本,提高效率具有重要意义。
技术实现思路
1、鉴于此,本发明提出一种基于任务理解的人-智能体集群协同与交互控制系统及方法,将融合人脑智能在抽象概念、意图推断和机器智能在信息存储、计算方面的优势,充分发挥智能体的参与水平和比重,将操作员从基础任务中解放出来,降低操作员在战场中的伤亡风险,提高操作员的效率。
2、本发明可以通过以下技术方案实现:
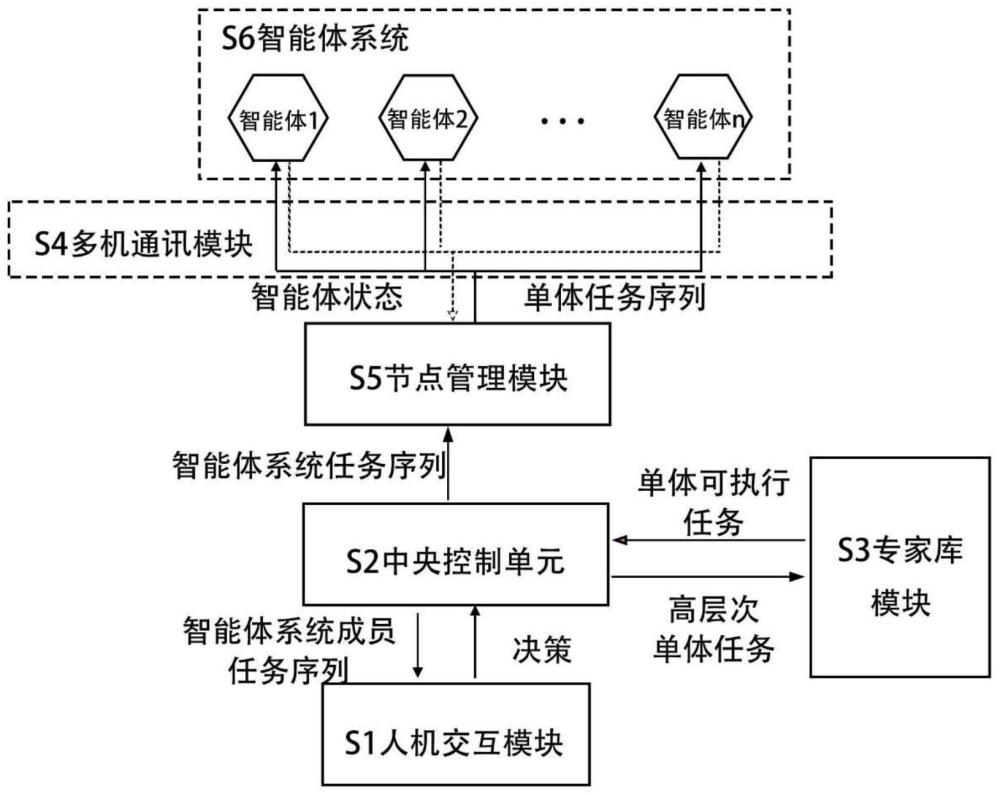
3、一种基于任务理解的人-智能体集群协同与交互控制系统,包括人机交互模块、中央控制单元、专家库模块、多机通讯模块、智能体节点管理模块和智能体系统;其中,
4、所述人机交互模块用于实现操作人员高层次任务指令的下发、临机决策调整和智能体状显示;
5、所述中央控制单元基于专家库模块,将人机交互模块下发的指令进行理解并自动分解成智能体可执行的任务序列,发送至智能体节点管理模块;
6、所述专家库模块为向中央控制单元提供面向场景的任务序列的专家库;
7、所述多机通讯模块用于智能体系统与智能体节点管理模块的信息互通;
8、所述智能体节点管理模块用于对智能体系统中的每个智能体状态进行管理,下发可执行的任务序列至智能体系统;
9、所述智能体系统包括多个智能体,用于执行任务指令。
10、进一步地,所述人机交互模块包括区域划分模块、任务下发模块、人在回路模块和安全状态识别模块,
11、所述区域划分模块显示地图,用于操作员在地图上进行区域划分;
12、所述任务下发模块提供任务指令框,用于任务和临机决策指令下发;
13、所述人在回路模块显示中央控制单元的任务序列和智能体成员组织结构以及每个智能体当前任务执行状态,通过人在回路模块对当前的计划进行优化;
14、所述安全状态识别模块对操作员下发的指令和位置进行判别,防止智能体再执行危险任务时误伤操作员。
15、进一步地,所述中央控制单元包括成员组织模块和任务分解模块;
16、所述成员组织模块基于人机交互模块下发的指令和区域对智能体系统中的成员进行组织,按照智能体的作业能力构建任务执行小组,并发送至人机交互模块;
17、所述任务分解模块理解人机交互模块下发的指令和区域,调用专家库模块,将决策拆分成智能体能够执行的元任务,并构建元任务的任务序列,其中元任务包含多个子任务。
18、进一步地,所述多机通讯模块包括以redis为媒介的rso-to-redis通道和redis-to-ros通道,所述ros-to-redis通道用以将ros中的话题、消息、服务转换成redis数据格式存储并通过redis通道发布出;所述redis-to-ros通道用于读出redis通道中的数据并转化成自定义的ros话题、消息、服务格式以供订阅者进行订阅。
19、进一步地,所述智能体节点管理模块包括智能体状态监管模块和智能体任务管理模块;
20、所述智能体状态监管模块通过redis-to-ros通道订阅执行任务的每个智能体的当前任务执行状态,并将该信息反馈至人机交互模块以供操作员实时监管并及时调整策略;
21、所述智能体任务管理模块通过redis-to-ros通道将任务分解模块划分的任务序列逐个下发给智能体小组的每个成员,通过智能体状态监管模块实时获取智能体任务执行的状态,当智能体完成当前的子任务后将通过redis-to-ros通道发送新的子任务。
22、进一步地,所述智能体的当前任务执行状态包括位姿、续航时长、功能完整性和任务执行结果信息。
23、进一步地,所述智能体系统包括空中系统和地面系统。
24、进一步地,所述空中系统包含多类型固定翼和旋翼无人机;所述地面系统包含轮式、腿足式实现爆破、搜索、运输自主车辆。
25、进一步地,所述任务包括抵近勘察、目标作业、物资运输和目标搜索。
26、一种基于任务理解的人-智能体集群协同与交互控制方法,包括步骤:
27、步骤1,通过人机交互模块下发指令;
28、步骤2,中央控制单元基于专家库模块,将人机交互模块下发的指令进行理解并自动分解成智能体可执行的任务序列,并反馈至人机交互模块进行任务序列确认;
29、步骤3,如果人机交互模块确认任务序列合理,中央控制单元将任务序列发送至智能体节点管理模块,执行步骤4;如果人机交互模块确认任务序列不合理,通过人机交互模块调整任务序列,执行步骤3,或者执行步骤2重新制定任务序列;
30、步骤4,智能体节点管理模块通过多机通讯模块与智能体系统进行信息互通,下发可执行的任务序列至智能体系统,同时对智能体系统中的每个智能体状态进行监控管理,并将智能体状态反馈至人机交互模块;
31、步骤5,智能体系统根据任务序列执行任务。
32、与现有技术相比,本发明具有以下增益效果:
33、1.本发明通过人机交互模块,将人脑智能在抽象概念、意图推断方面的优势融合至智能体系统中,改善了智能体信息非结构化、不确定性高的环境中高水平决策不收敛的问题,提升了真能体系统应对复杂环境复杂任务的鲁棒性对于提升智能体的参与比重具有重要作用;
34、2.本发明提出了一种集中式的智能体系统组织方法,针对传统单一智能体在载荷作业续航等方面的局限性,该组织方法将基于任务需求合理组织参与任务的智能体实现能力互补满足需求,具体来说,中央管理单元对复杂任务进行理解并分解,随后在智能体系统中组织执行任务的小组并规划每个参与智能体的任务序列。
技术特征:
1.一种基于任务理解的人-智能体集群协同与交互控制系统,其特征在于,包括人机交互模块、中央控制单元、专家库模块、多机通讯模块、智能体节点管理模块和智能体系统;其中,
2.根据权利要求1所述的基于任务理解的人-智能体集群协同与交互控制系统,其特征在于,所述人机交互模块包括区域划分模块、任务下发模块、人在回路模块和安全状态识别模块,
3.根据权利要求2所述的基于任务理解的人-智能体集群协同与交互控制系统,其特征在于,所述中央控制单元包括成员组织模块和任务分解模块;
4.根据权利要求3所述的基于任务理解的人-智能体集群协同与交互控制系统,其特征在于,所述多机通讯模块包括以redis为媒介的rso-to-redis通道和redis-to-ros通道,所述ros-to-redis通道用以将ros中的话题、消息、服务转换成redis数据格式存储并通过redis通道发布出;所述redis-to-ros通道用于读出redis通道中的数据并转化成自定义的ros话题、消息、服务格式以供订阅者进行订阅。
5.根据权利要求4所述的基于任务理解的人-智能体集群协同与交互控制系统,其特征在于,所述智能体节点管理模块包括智能体状态监管模块和智能体任务管理模块;
6.根据权利要求5所述的基于任务理解的人-智能体集群协同与交互控制系统,其特征在于,所述智能体的当前任务执行状态包括位姿、续航时长、功能完整性和任务执行结果信息。
7.根据权利要求5所述的基于任务理解的人-智能体集群协同与交互控制系统,其特征在于,所述智能体系统包括空中系统和地面系统。
8.根据权利要求7所述的基于任务理解的人-智能体集群协同与交互控制系统,其特征在于,所述空中系统包含多类型固定翼和旋翼无人机;所述地面系统包含轮式、腿足式实现爆破、搜索、运输自主车辆。
9.根据权利要求1所述的基于任务理解的人-智能体集群协同与交互控制系统,其特征在于,所述任务包括抵近勘察、目标作业、物资运输和目标搜索。
10.一种基于任务理解的人-智能体集群协同与交互控制方法,其特征在于,包括步骤:
技术总结
本发明涉及一种基于任务理解的人‑智能体集群协同与交互控制系统及方法,包括人机交互模块、中央控制单元、专家库模块、多机通讯模块、智能体节点管理模块和智能体系统;人机交互模块用于实现操作人员高层次任务指令的下发、临机决策调整和智能体状显示;中央控制单元基于专家库模块,将人机交互模块下发的指令进行理解并自动分解成智能体可执行的任务序列,发送至智能体节点管理模块;多机通讯模块用于智能体系统与智能体节点管理模块的信息互通;智能体节点管理模块用于对智能体系统中的每个智能体状态进行管理,下发可执行的任务序列至智能体系统。本发明提高了智能体系统对复杂任务的适应能力,同时降低了操作员的危险程度。
技术研发人员:何龙,王建伟,吴疆,黄聪聪,钱剑勇,李唯一,牛春阳,那英超
受保护的技术使用者:杭州智元研究院有限公司
技术研发日:
技术公布日:2024/5/27
- 还没有人留言评论。精彩留言会获得点赞!