基于多源重力数据融合的重力扰动获取方法
本申请涉及重力辅助惯性导航,特别是涉及一种基于多源重力数据融合的重力扰动获取方法。
背景技术:
1、惯性导航系统由于其导航参数全面、输出稳定连续、信号无源隐蔽的特征,是各类海洋载体导航系统的基础。对于大型水面舰艇、水下潜航器以及潜艇等载体,惯性导航系统的性能支撑起了其导航能力的下限。尤其是对于水下载体,可靠的自主导航技术能够提升载体导航定位精度,从而延长载体浮起校正时间间隔,以极大地提升载体作业效率及隐蔽性能。在卫星拒止环境下,海洋导航方式主要包括:协同导航、地形辅助导航、地磁辅助导航、重力匹配导航等。上述海洋导航方式中,协同导航无法实现完全自主,且隐蔽性差,容易使载体安全受到威胁;基于水声技术的地形辅助导航因其隐蔽性差、测深声呐受水下环境影响大、直接探测海底地形难度大等因素而难以应用于水面舰艇;地磁辅助导航虽然可以提供全天候全海域的信息,但是磁环境易受干扰,从而引入更多误差;相比而言,重力场比地形和地磁场在海洋环境中更加适用,重力匹配导航在地磁辅助导航优点的基础上,改善了信号的稳定性,可以提供更加可靠的特征信息以修正载体导航参数。此外,随着惯性导航器件精度的提升,单纯依靠惯性导航系统提供导航参数已成为可能,如何在配备高精度惯性器件的基础上,进一步提升船用惯性导航系统的精度,成为了亟需解决的现实问题。当载体搭载的惯性器件精度较高时,重力扰动作为海洋惯性导航系统的重要误差源,随海洋载体较长任务周期的累积而产生无法忽略的导航参数误差,当考虑重力扰动时,重力扰动自身的误差与惯性导航误差成正比,因此获取高精度重力扰动是开展重力辅助惯性导航研究的有效保障。
2、然而,目前的获取重力扰动的方法主要是直接求差法或者重力场球谐模型提取的方法,其中直接求差法由于惯性导航无法区分重力加速度和载体加速度,因此需要高精度的外部观测提供载体运动状态参考,而惯性器件与重力扰动耦合,直接求差法得到的重力扰动精度受到重力仪中惯性器件精度的限制。重力扰动测量结果在未经过修正的情况下可靠性将极大的降低。基于球谐模型的重力提取方法对于高阶数据的计算效率低,实时性较差,直接提取的方式难以满足重力补偿或重力匹配的需求,且重力扰动信息的高频特征不够明显,部分区域的精度难以保证。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够获取高精度的重力扰动数据的基于多源重力数据融合的重力扰动获取方法。
2、一种基于多源重力数据融合的重力扰动获取方法,所述方法包括:
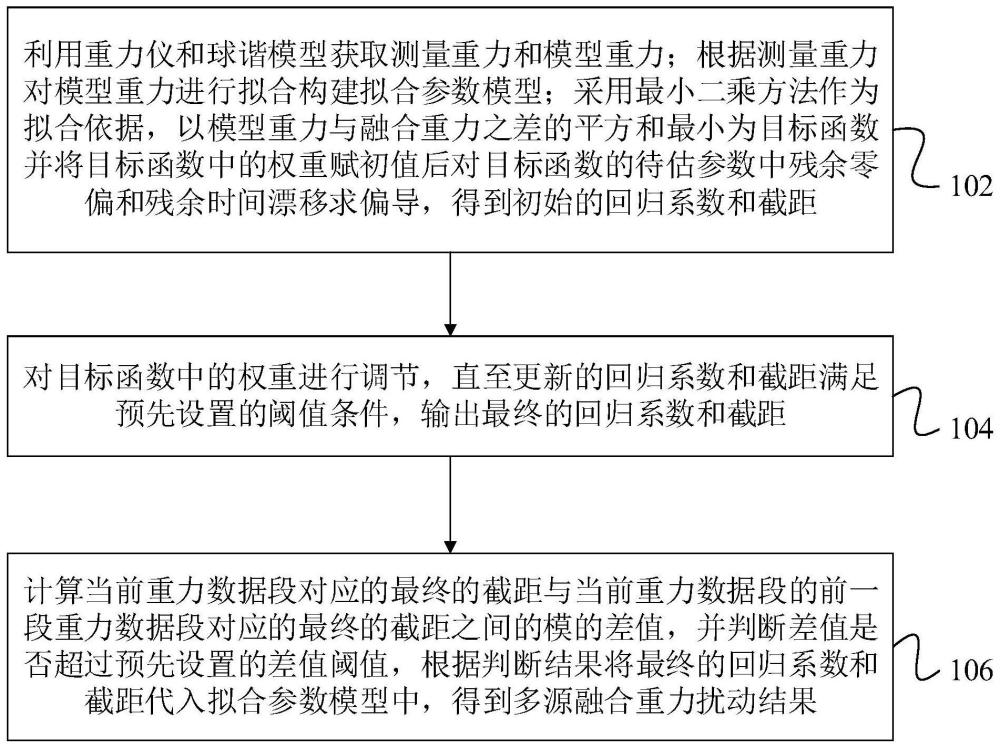
3、利用重力仪和球谐模型获取测量重力和模型重力;
4、根据测量重力对模型重力进行拟合构建拟合参数模型;采用最小二乘方法作为拟合依据,以模型重力与融合重力之差的平方和最小为目标函数并将目标函数中的权重赋初值后对目标函数的待估参数中残余零偏和残余时间漂移求偏导,得到初始的回归系数和截距;
5、对目标函数中的权重进行调节,直至更新的回归系数和截距满足预先设置的阈值条件,输出最终的回归系数和截距;
6、计算当前重力数据段对应的最终的截距与当前重力数据段的前一段重力数据段对应的最终的截距之间的模的差值,并判断差值是否超过预先设置的差值阈值,根据判断结果将最终的回归系数和截距代入拟合参数模型中,得到多源融合重力扰动结果。
7、在其中一个实施例中,根据测量重力对模型重力进行拟合构建拟合参数模型,包括:
8、根据测量重力对模型重力进行拟合,将测量重力作为样本,模型重力作为标签,则拟合过程近似为机器学习领域中的回归问题,则构建拟合参数模型为
9、
10、其中,δg表示多源融合重力扰动,表示残余零偏和kat表示残余时间漂移。
11、在其中一个实施例中,采用最小二乘方法作为拟合依据,以模型重力与融合重力之差的平方和最小为目标函数,包括:
12、采用最小二乘方法作为拟合依据,以模型重力与融合重力之差的平方和最小为目标函数为
13、
14、其中,ωi表示权重,i表示重力数据段的序号,n表示重力数据段的总数,表示模型重力异常,表示天向重力扰动,表示初始的回归系数,表示测量重力异常,表示初始的截距。
15、在其中一个实施例中,将目标函数中的权重赋初值后对目标函数的待估参数中残余零偏和残余时间漂移求偏导,得到初始的回归系数和截距,包括:
16、将目标函数中的权重赋初值ωi=1后对目标函数的待估参数中残余零偏和残余时间漂移求偏导,得到初始的回归系数和截距分别为
17、
18、
19、其中,为数据集中测量重力异常δgc的均值,为数据集中模型重力异常δgm的均值。
20、在其中一个实施例中,对目标函数中的权重进行调节,直至更新的回归系数和截距满足预先设置的阈值条件,输出最终的回归系数和截距,包括:
21、调节权重ωi,对于离拟合曲线远的点减小权重值,离拟合曲线近的点增大权重值;使用逐点调节权重后的结果进行最小二乘法,得到更新的回归系数katk和截距
22、判断与是否同时成立,其中tl=0.0001为容差,如果同时成立,则输出对应的回归系数kat(i)和截距否则使i=i+1,重新调节权重计算回归系数和截距。
23、在其中一个实施例中,判断差值是否超过预先设置的差值阈值,根据判断结果将最终的回归系数和截距代入拟合参数模型中,得到多源融合重力扰动结果,包括:
24、判断差值是否超过预先设置的差值阈值,如果没有超过阈值,则继续使用第i-1段数据的最终的截距和最终的回归系数kat(i-1)代入拟合参数模型,得到第i(i=1,2,3...)段的多源融合重力扰动结果;
25、如果超过阈值,使用第1段到当前第i(i=1,2,3...)段全部的测量重力和模型重力重新进行拟合构建拟合参数模型。
26、上述基于多源重力数据融合的重力扰动获取方法,首先根据测量重力对模型重力进行拟合构建拟合参数模型;采用最小二乘方法作为拟合依据,以模型重力与融合重力之差的平方和最小为目标函数并将目标函数中的权重赋初值后对目标函数的待估参数中残余零偏和残余时间漂移求偏导,得到初始的回归系数和截距,对目标函数中的权重进行调节,直至更新的回归系数和截距满足预先设置的阈值条件,输出最终的回归系数和截距,计算当前重力数据段对应的最终的截距与当前重力数据段的前一段重力数据段对应的最终的截距之间的模的差值,并判断差值是否超过预先设置的差值阈值,根据判断结果将最终的回归系数和截距代入拟合参数模型中,得到多源融合重力扰动结果,本申请通过将测量重力与模型重力分别作为输入对真实重力扰动结果进行预测,以模型结果为基准,使用实测数据对模型重力进行拟合,在保证高频信息不丢失的情况下进行低频修正,补偿了测量重力的等效误差并提高了融合重力精度,得到细节丰富趋势可靠的重力扰动。
技术特征:
1.一种基于多源重力数据融合的重力扰动获取方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,根据所述测量重力对所述模型重力进行拟合构建拟合参数模型,包括:
3.根据权利要求1所述的方法,其特征在于,采用最小二乘方法作为拟合依据,以模型重力与融合重力之差的平方和最小为目标函数,包括:
4.根据权利要求3所述的方法,其特征在于,将目标函数中的权重赋初值后对所述目标函数的待估参数中残余零偏和残余时间漂移求偏导,得到初始的回归系数和截距,包括:
5.根据权利要求3所述的方法,其特征在于,对所述目标函数中的权重进行调节,直至更新的回归系数和截距满足预先设置的阈值条件,输出最终的回归系数和截距,包括:
6.根据权利要求1所述的方法,其特征在于,判断所述差值是否超过预先设置的差值阈值,根据判断结果将最终的回归系数和截距代入所述拟合参数模型中,得到多源融合重力扰动结果,包括:
技术总结
本申请涉及一种基于多源重力数据融合的重力扰动获取方法。所述方法包括:根据测量重力对模型重力进行拟合构建拟合参数模型;采用最小二乘方法设计目标函数并将目标函数中的权重赋初值后对目标函数的待估参数中残余零偏和残余时间漂移求偏导,对权重进行调节,直至更新的回归系数和截距满足预先设置的阈值条件,输出最终的回归系数和截距;计算当前重力数据段对应的最终的截距与前一段重力数据段对应的最终的截距之间的模的差值,并判断差值是否超过预先设置的差值阈值,根据判断结果将最终的回归系数和截距代入拟合参数模型中,得到多源融合重力扰动结果。采用本方法能够获取高精度的重力扰动数据。
技术研发人员:郭妍,罗凯鑫,于瑞航,吴美平,曹聚亮,熊志明,蔡劭琨,杨柏楠,范颖,张恒瑜
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!