毫米波雷达点云的虚假目标去除方法
本发明涉及的是一种自动驾驶领域的技术,具体是一种用于自动驾驶场景的毫米波雷达点云的虚假目标去除系统。
背景技术:
1、在实际应用中,毫米波雷达由于多径效应产生虚假目标,使得信号到达传感器接收端时存在多个时延和相位不同的副本,导致传感器接收到失真的信号。
技术实现思路
1、本发明针对现有技术存在的上述不足,提出一种毫米波雷达点云的虚假目标去除方法,利用激光雷达收集的点云数据,只使用一个毫米波雷达传感器的一个测量周期的雷达数据,并使用深度学习算法实现基于毫米波雷达点云的虚假目标识别,实现在自动驾驶过程中去除虚假目标。
2、本发明是通过以下技术方案实现的:
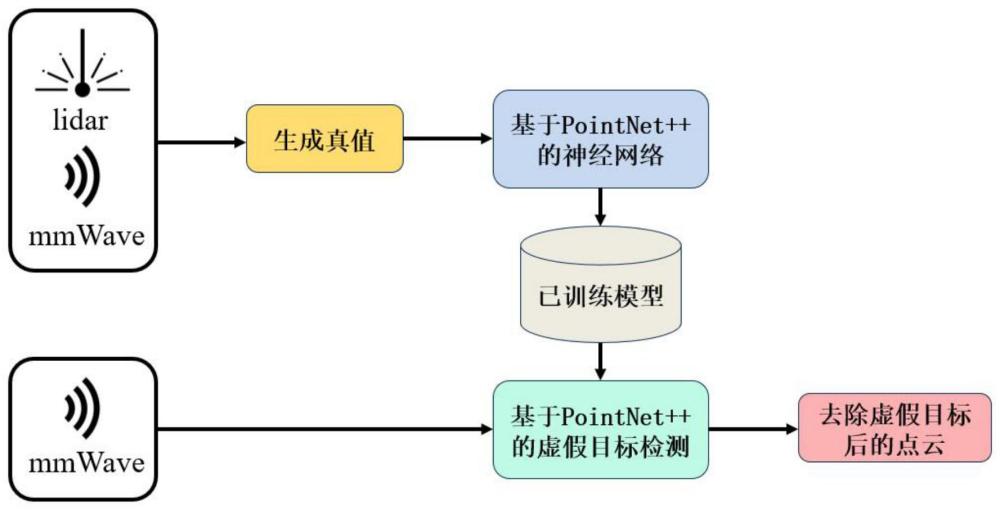
3、本发明涉及一种毫米波雷达点云的虚假目标去除方法,在离线阶段通过比较激光雷达和毫米波雷达的点云数据获得毫米波雷达点云中的真实点,以此为训练集对构建得到的神经网络进行训练;在识别阶段使用训练后的神经网络根据毫米波雷达点云数据实时生成虚假目标的检测结果。
4、所述的神经网络为基于pointnet++神经网络,通过皮尔森相关性计算得出除了三维坐标之外的与点云真实性相关度较高的点云速度、距离和角度信息,作为额外输入,与三维坐标的特征聚合,共同作为依据判断点云的真实性,从而适应对自动驾驶场景中毫米波雷达点云真实性的识别。
5、所述的训练是指:利用激光雷达点云作为参考,以毫米波雷达点的周边范围内有无激光雷达的点作为依据,判断毫米波雷达点云中的点是否为真实点,生成训练标签,以该标签为依据进行有监督学习。
6、技术效果
7、本发明通过在pointnet++神经网络中添加了额外的与点云真实性相关度高的输入,并通过多层神经网络逐步提取点云的特征。将动静点分离后进行训练模型,对数据进行总体观察,归纳推理出其中静止点几乎都为真实值,虚假值主要集中在动态点中,将动静点分离再进行训练,可以将虚假目标分离工作集中,提高训练样本准确度;对与激光雷达比照标记后的毫米波雷达数据进行皮尔森相关性计算,发现点云速度、距离和角度与点的真实性相关度较高,将其作为训练参数加入到训练模型中进行训练,提高预测精度。与现有技术相比,本发明能够实现毫米波雷达点云多特征融合,虚假点的高准确率识别与去除,性能优于其他研究的方法。显著提升了miou与虚假目标识别率,在多种复杂环境中,该方法相较于现有方法在虚假目标去除方面表现出更高的精度和稳定性,特别是动态虚假目标和大车杂波去除。
技术特征:
1.一种毫米波雷达点云的虚假目标去除方法,其特征在于,在离线阶段通过比较激光雷达和毫米波雷达的点云数据获得毫米波雷达点云中的真实点,以此为训练集对构建得到的神经网络进行训练;在识别阶段使用训练后的神经网络根据毫米波雷达点云数据实时生成虚假目标的检测结果;
2.根据权利要求1所述的毫米波雷达点云的虚假目标去除方法,其特征是,所述的训练是指:利用激光雷达点云作为参考,以毫米波雷达点的周边范围内有无激光雷达的点作为依据,判断毫米波雷达点云中的点是否为真实点,生成训练标签,以该标签为依据进行有监督学习。
3.根据权利要求1所述的毫米波雷达点云的虚假目标去除方法,其特征是,所述的毫米波雷达点云中的真实点是指:将激光雷达和毫米波雷达在同一时刻接收的数据分别处理为点云后,以激光雷达点云为基准,对毫米波雷达点云中所有点进行遍历,当该点周围存在有激光雷达的点,则将其判定为真实目标,否则判定为虚假目标;
4.根据权利要求1所述的毫米波雷达点云的虚假目标去除方法,其特征是,所述的神经网络为基于pointnet++神经网络,具体包括:采样单元、聚类单元、点网络单元以及跳跃连接单元,其中:采样单元在接受的n个点中,根据度量函数,挑选m个互相之间距离最远的点;聚类单元对于m个中心点对应的局部区域,找到每个区域内的点;点网络单元对于m个区域,使用pointnet++技术得到m个新点,空间坐标为原本的中心点;跳跃连接单元将单个点的特征与全局特征进行综合,组合成规模更大的特征。
5.根据权利要求1或2所述的毫米波雷达点云的虚假目标去除方法,其特征是,所述的神经网络,具体通过以下步骤进行训练:
技术总结
一种毫米波雷达点云的虚假目标去除方法,在离线阶段通过比较激光雷达和毫米波雷达的点云数据获得毫米波雷达点云中的真实点,以此为训练集对构建得到的神经网络进行训练;在识别阶段使用训练后的神经网络根据毫米波雷达点云数据实时生成虚假目标的检测结果。本发明利用激光雷达收集的点云数据,只使用一个毫米波雷达传感器的一个测量周期的雷达数据,并使用深度学习算法实现基于毫米波雷达点云的虚假目标识别,实现在自动驾驶过程中去除虚假目标。
技术研发人员:俞嘉地,曹健,曹皓然
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!