一种人体姿态检测方法与流程
本申请涉及人体检测,具体涉及一种人体姿态检测方法。
背景技术:
1、随着人机交互的不断发展,人体的手势,肢体动作等信息也在很多场景辅助人类协同工作,因此,现代智能技术也致力于使机器理解人类姿态和动作所表达的具体含义。随着深度学习的广泛研究,基于计算机视觉和神经网络算法的人体姿态检测和识别已经有了长足的发展。
2、目前关于人体姿态检测的多数研究都是基于计算机视觉,虽然通过图像识别技术可以捕捉更多人体姿态信息,但这种方式下用户隐私的保护性很差,用户的私密性和隐私性得不到充分保护。同时,多数研究的数据采集都是基于实验室环境,且多种人体姿态的数据天然是不均衡的,比如跌倒动作日常发生的频率肯定会比坐下或者站立低很多,在这种情况下少数类的信息得不到充分的利用,跌倒等少数类样本姿态的分类效果难以保证,类不平衡问题无处不在,如网络入侵检测、情感分析、欺诈检测、医疗疾病诊断检测和故障诊断等领域。大多数标准分类算法往往表现出对多数类的偏倚,因此类的不平衡性往往会损害标准分类器的性能,尤其是对少数类的分类性能。但往往少数类样本被错误分类的代价要比多数类样本错误分类造成的损失更大,很难实现超过两种姿态的多分类识别。
技术实现思路
1、本申请旨在解决现有人体姿态检测方式存在隐私保护性以及准确性较差的问题,提出另一种人体姿态检测方法。
2、本申请解决上述技术问题所采用的技术方案是:
3、一种人体姿态检测方法,所述方法包括:
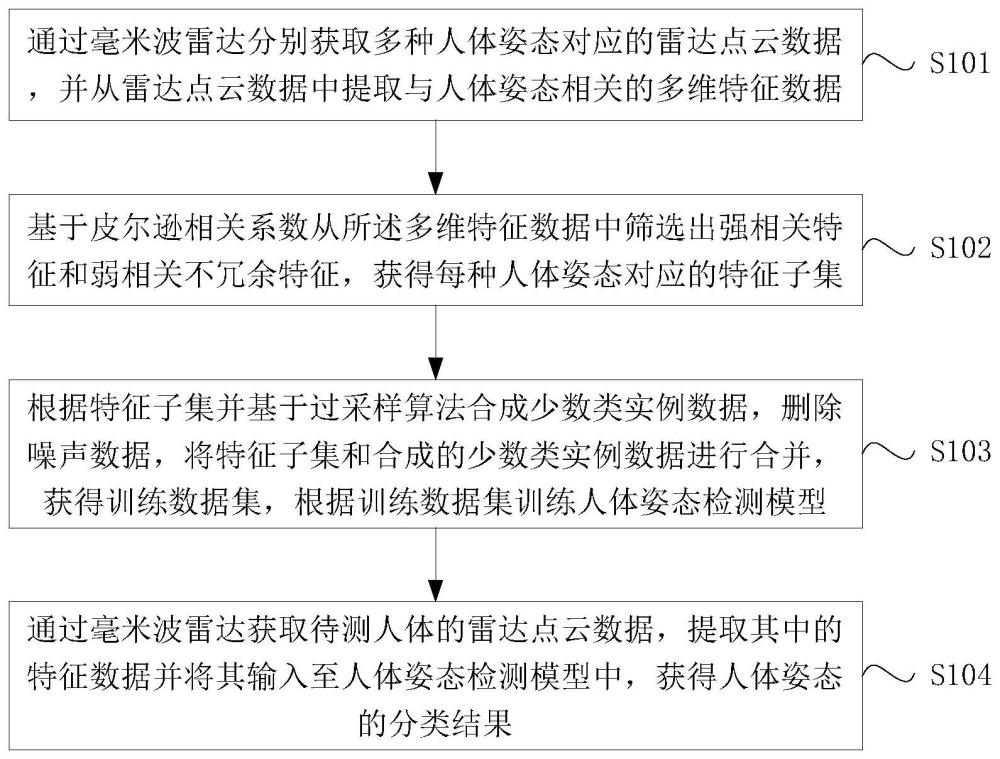
4、通过毫米波雷达分别获取多种人体姿态对应的雷达点云数据,并从所述雷达点云数据中提取与人体姿态相关的多维特征数据;
5、基于皮尔逊相关系数从所述多维特征数据中筛选出强相关特征和弱相关不冗余特征,获得每种人体姿态对应的特征子集;
6、根据所述特征子集并基于过采样算法合成少数类实例数据,删除噪声数据,将特征子集和合成的少数类实例数据进行合并,获得训练数据集,根据所述训练数据集训练人体姿态检测模型;
7、通过毫米波雷达获取待测人体的雷达点云数据,提取其中的特征数据并将其输入至所述人体姿态检测模型中,获得人体姿态的分类结果。
8、进一步地,获取多种人体姿态对应的雷达点云数据,具体包括:
9、分别选择人体参数各不相同的多个测试人员在同一空间内重复多种人体姿态,同时毫米波雷达向该空间发射线性调频连续波信号,毫米波雷达接收端对回波信号进行混频处理,分别获得每种人体姿态对应的雷达点云数据,所述人体参数至少包括身高、体重、年龄和性别,所述人体姿态的种类至少包括坐下、蹲下、跌倒和站立。
10、进一步地,所述毫米波雷达包括三个发射天线和四个接收天线,支持60-64ghz的调频带宽,天线增益为10db,水平方向视场角为±60°,垂直方向为±15°,雷达高度设置为1.8m。
11、进一步地,从所述雷达点云数据中提取与人体姿态相关的多维特征数据,具体包括:
12、持续获取毫米波雷达的单帧雷达点云数据,单帧雷达点云数据表示为:[d1,d2,…,dn],其中,dn表示第n帧雷达点云数据,n表示每帧雷达点云数据的数量;
13、当持续获取的雷达点云数据的帧数达到预设窗口长度,则启动滑窗,按预设步长截取数据矩阵,并基于所述数据矩阵进行多维特征数据提取,多维特征数据表示为:[f1,f2,…,fm],其中,fm表示第m个特征,m表示特征数量。
14、进一步地,所述多维体征数据至少包括窗口内目标的位置坐标、最大高度、最小高度、多普勒极限频率值、多普勒热力图外包络曲线的峰度、峭度和最大斜率。
15、进一步地,基于皮尔逊相关系数从所述多维特征数据中筛选出强相关特征和弱相关不冗余特征,具体包括:
16、计算多维特征数据中任意两个特征对应的皮尔逊相关系数,并根据所述皮尔逊相关系数对多维特征数据进行筛选,所述皮尔逊相关系数的计算公式如下:
17、
18、
19、其中,ρx,y表示特征x和特征y之间的皮尔逊相关系数,cov(x,y)表示特征x和特征y之间的协方差,e(x)表示特征x的方差,e(y)表示特征y的方差,xi表示特征x的第i个样本,yi表示特征y的第i个样本,表示特征x所有样本的平均值,表示特征y所有样本的平均值,t表示特征中的样本数量。
20、进一步地,根据所述特征子集并基于过采样算法合成少数类实例数据,具体包括:
21、在每种人体姿态对应的特征子集中确定少数类样本和多数类样本,少数类样本表示为:n=[n1,n2,…,nb],多数类样本表示为:p=[p1,p2,…,pa],其中,nb表示第b个样本,b表示少数类样本的样本数量,pb表示第a个样本,a表示多数类样本的样本数量;
22、计算少数类中的每个样本与所有的少数类样本的欧氏距离,得到样本点的k近邻,并根据样本采样率在k近邻之间进行线性插值,
23、合成少数类样本的新样本,获得少数类实例数据,合成公式如下:n′i=ni+rj*dj,其中,n′i表示新样本,ni表示少数类样本的第i个样本,rj表示0到1之间的随机数,dj表示样本ni与其k近邻之间的欧式距离。
24、进一步地,在训练人体姿态检测模型之前,所述方法还包括:
25、对训练数据集中的数据进行归一化处理,公式如下:
26、
27、其中,f′表示归一化处理之后的数据,f表示归一化之前的数据,fmax表示对应特征的最大值,fmin表示对应特征的最小值。
28、进一步地,根据所述训练数据集训练人体姿态检测模型,具体包括:
29、将所述训练数据集分为训练集和测试集,根据所述训练集及其对应的人体姿态种类训练adaboost分类模型,获得人体姿态检测模型;
30、将测试集输入人体姿态检测模型中进行测试,确定人体姿态检测模型的准确率,判断准确率是否大于预设准确率,若是则完成训练,否则重新训练。
31、进一步地,所述方法还包括:
32、根据人体姿态的分类结果以及待测人体的空间位置,激活相应的智能家居控制指令。
33、本申请的有益效果是:本申请提供的人体姿态检测方法,使用毫米波雷达采集人体姿态数据,不仅保护用户的私密性,而且成本低廉,安全性强,对光照环境不敏感。对于不均衡的姿态数据,使用过采样算法,删除原始数据的噪声数据,并合成少数类实例,以平衡数据集,训练人体姿态检测模型,以实现人体姿态多分类的效果,进而提高人体姿态检测的准确性。
技术特征:
1.一种人体姿态检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的人体姿态检测方法,其特征在于,获取多种人体姿态对应的雷达点云数据,具体包括:
3.根据权利要求1或2所述的人体姿态检测方法,其特征在于,所述毫米波雷达包括三个发射天线和四个接收天线,支持60-64ghz的调频带宽,天线增益为10db,水平方向视场角为±60°,垂直方向为±15°,雷达高度设置为1.8m。
4.根据权利要求1所述的人体姿态检测方法,其特征在于,从所述雷达点云数据中提取与人体姿态相关的多维特征数据,具体包括:
5.根据权利要求4所述的人体姿态检测方法,其特征在于,所述多维体征数据至少包括窗口内目标的位置坐标、最大高度、最小高度、多普勒极限频率值、多普勒热力图外包络曲线的峰度、峭度和最大斜率。
6.根据权利要求1所述的人体姿态检测方法,其特征在于,基于皮尔逊相关系数从所述多维特征数据中筛选出强相关特征和弱相关不冗余特征,具体包括:
7.根据权利要求1所述的人体姿态检测方法,其特征在于,根据所述特征子集并基于过采样算法合成少数类实例数据,具体包括:
8.根据权利要求1所述的人体姿态检测方法,其特征是在于,在训练人体姿态检测模型之前,所述方法还包括:
9.根据权利要求1所述的人体姿态检测方法,其特征在于,根据所述训练数据集训练人体姿态检测模型,具体包括:
10.根据权利要求9所述的人体姿态检测方法,其特征在于,所述方法还包括:
技术总结
本申请涉及人体检测技术领域,公开了一种人体姿态检测方法,旨在解决现有人体姿态检测方式存在隐私保护性以及准确性较差的问题,方案主要包括:分别获取多种人体姿态对应的雷达点云数据,并提取与人体姿态相关的多维特征数据;基于皮尔逊相关系数筛选出强相关特征和弱相关不冗余特征,获得每种人体姿态对应的特征子集;基于过采样算法合成少数类实例数据,删除噪声数据,将特征子集和合成的数据进行合并,获得训练数据集,根据训练数据集训练人体姿态检测模型;获取待测人体的雷达点云数据,提取其中的特征数据并将其输入至人体姿态检测模型中,获得人体姿态的分类结果。本申请提高了人体姿态检测的隐私性和准确性,特别适用于跌倒检测。
技术研发人员:李阳,李俊潇,王阳宣,彭世伟,李晓冬
受保护的技术使用者:四川启睿克科技有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!