一种煤矿井下场景重建系统及方法与流程
本申请涉及煤矿开采,具体涉及一种煤矿井下场景重建系统及方法。
背景技术:
1、随着井下电气、传感、通信、控制技术的深入研发应用,部分煤矿井下场景,已经部署轮式或轨道式移动装置进行场景数字化扫描与重建等工作任务。然而,我国煤矿采场地质条件复杂多样,现有的井下场景数字化扫描与重建方法与系统不具备灵活、通过性强的移动载体,在煤矿井下复杂环境中存在大量不可达场景,无法完成煤矿井下复杂场景全面、准确的动态数字化扫描与重建。
技术实现思路
1、本申请旨在提供一种煤矿井下场景重建系统及方法,以解决传统现有技术无法对煤矿井下复杂场景进行全面、准确数字化重建,额外增加人工劳动强度等技术问题。
2、为了解决上述技术问题,本申请实施例提供一种煤矿井下场景重建系统,包括:
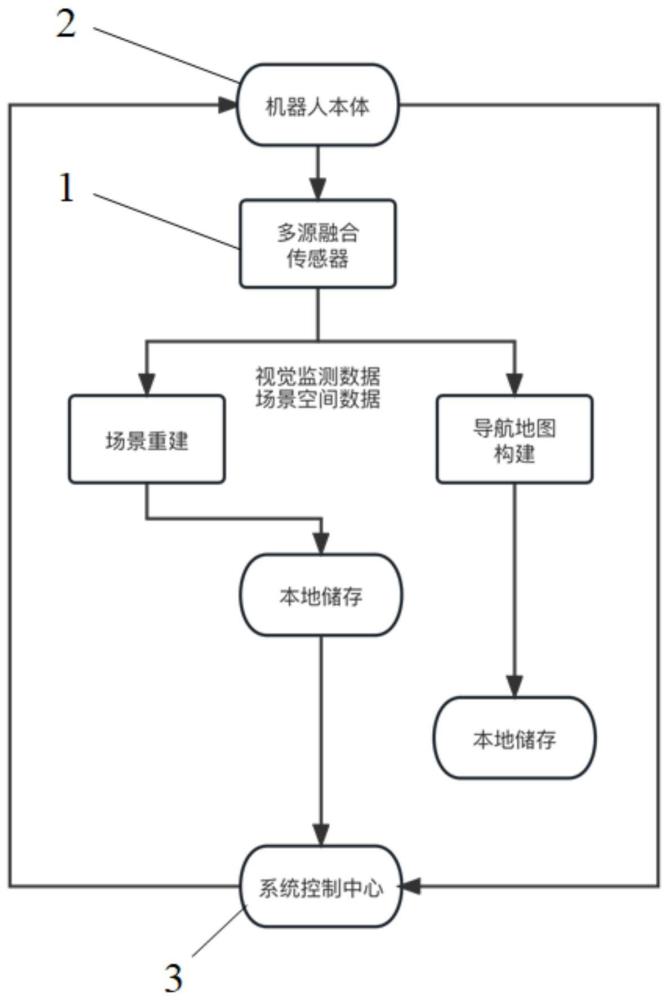
3、多源融合传感器,安装于足式机器人,用于在所述足式机器人沿预设行进路线行进时,采集井下作业场景的场景空间数据和视觉监测数据,其中,所述场景空间数据包括所述足式机器人周围的环境数据,所述视觉监测数据包括所述井下作业场景中的作业设备及其运行数据;
4、边缘智能计算终端,与所述多源融合传感器连接,用于根据所述空间数据和视觉监测数据构建导航地图,并基于所述导航地图和所述场景空间数据进行煤矿井下场景数字化重建。
5、在一些实施例中,所述边缘智能计算终端用于在所述足式机器人返回至起始限位停机标靶的位置时,生成场景重建结果,所述起始限位停机标靶的位置预先设定。
6、在一些实施例中,所述煤矿井下场景重建系统还包括控制器,所述控制器安装于所述足式机器人,用于在所述足式机器人的行进参数和/或电源参数不满足预设条件时,控制所述足式机器人返回至起始限位停机标靶。
7、在一些实施例中,还包括存储模块,用于存储和更新所述导航地图以及所述场景重建结果。
8、在一些实施例中,所述边缘智能计算终端包括报警模块,用于在所述足式机器人无法完成场景重建时进行报警处理。
9、在一些实施例中,所述边缘智能计算终端安装于所述足式机器人,或者所述边缘智能计算终端为远程系统控制中心。
10、本申请实施例还提供一种煤矿井下场景重建方法,用于煤矿井下场景重建系统,所述煤矿煤矿井下场景重建系统包括多源融合传感器和边缘智能计算终端,所述多源融合传感器安装于足式机器人,所述边缘智能计算终端与所述多源融合传感器连接,所述方法包括:
11、所述多源融合传感器在所述足式机器人沿预设行进路线行进时,采集井下作业场景的场景空间数据和视觉监测数据,其中,所述场景空间数据包括所述足式机器人周围的环境数据,所述视觉监测数据包括所述井下作业场景中的作业设备及其运行数据;
12、所述边缘智能计算终端根据所述场景空间数据和视觉监测数据构建导航地图,并基于所述导航地图和所述场景空间数据进行煤矿井下场景数字化重建。
13、在一些实施例中,所述煤矿井下场景重建系统还包括安装于所述足式机器人的控制器,所述方法还包括:
14、所述控制器在所述足式机器人的行进参数和/或电源参数不满足预设条件时,控制所述足式机器人返回至起始限位停机标靶。
15、在一些实施例中,所述控制器在所述足式机器人的行进参数和/或电源参数不满足预设条件时,控制所述足式机器人返回至起始限位停机标靶,包括:
16、所述控制器在所述足式机器人长时间未检测到行进方向存在可通行道路,且所述足式机器人未到达预设终点时,控制所述足式机器人返回至所述起始限位停机标靶;或
17、所述控制器在所述足式机器人的续航里程无法完成场景重建任务时,控制所述足式机器人返回至所述起始限位停机标靶。
18、在一些实施例中,所述煤矿井下作业场景包括煤矿井下巷道、采煤工作面、掘进工作面中的至少一个场景。
19、本申请实施例还提供一种电子设备,至少包括存储器和处理器,所述存储器上存储有计算机程序,所述处理器在执行所述存储器上的计算机程序时实现上述任一方法的步骤。
20、本申请实施例还提供一种计算机可读存储介质,所述计算机可读介质存储有计算机程序,所述计算机程序被处理器执行时实现上述任一方法的步骤。
21、本申请提供的煤矿井下场景重建系统及方法,通过利用安装于足式机器人的多源融合传感器,在所述足式机器人沿预设行进路线行进时,采集井下作业场景的场景空间数据和视觉监测数据,然后,利用与所述多源融合传感器连接的边缘智能计算终端,根据所述场景空间数据和视觉监测数据构建导航地图,并基于所述导航地图和所述场景空间数据进行煤矿井下场景数字化重建,即以足式机器人作为井下作业移动载体,结合煤矿井下实际工况,进行多场景实时重建,能够充分利用足式机器人复杂地形适应能力,协助进行煤矿井下多场景数字化重建工作,对煤矿井下场景进行全面、准确的数字化重建,有效推动透明矿井建设,减轻人工劳动强度。
技术特征:
1.一种煤矿井下场景重建系统,其特征在于,包括:
2.根据权利要求1所述的煤矿井下场景重建系统,其特征在于,所述边缘智能计算终端还用于在所述足式机器人返回至起始限位停机标靶的位置时,生成场景重建结果,所述起始限位停机标靶的位置预先设定。
3.根据权利要求2所述的煤矿井下场景重建系统,其特征在于,所述煤矿井下场景重建系统还包括控制器,所述控制器安装于所述足式机器人,用于在所述足式机器人的行进参数和/或电源参数不满足预设条件时,控制所述足式机器人返回至所述起始限位停机标靶。
4.根据权利要求2所述的煤矿井下场景重建系统,其特征在于,还包括存储模块,用于存储和更新所述导航地图以及所述场景重建结果。
5.根据权利要求1所述的煤矿井下场景重建系统,其特征在于,所述边缘智能计算终端包括报警模块,用于在所述足式机器人无法完成场景重建时进行报警处理。
6.根据权利要求1所述的煤矿井下场景重建系统,其特征在于,所述边缘智能计算终端安装于所述足式机器人,或者所述边缘智能计算终端为远程系统控制中心。
7.一种煤矿井下场景重建方法,用于煤矿井下场景重建系统,其特征在于,所述煤矿煤矿井下场景重建系统包括多源融合传感器和边缘智能计算终端,所述多源融合传感器安装于足式机器人,所述边缘智能计算终端与所述多源融合传感器连接,所述方法包括:
8.根据权利要求7所述的方法,其特征在于,所述煤矿井下场景重建系统还包括安装于所述足式机器人的控制器,所述方法还包括:
9.根据权利要求8所述的方法,其特征在于,所述控制器在所述足式机器人的行进参数和/或电源参数不满足预设条件时,控制所述足式机器人返回至起始限位停机标靶,包括:
10.根据权利要求7所述的方法,其特征在于,所述煤矿井下作业场景包括煤矿井下巷道、采煤工作面、掘进工作面中的至少一个场景。
技术总结
本申请公开了一种煤矿井下场景重建系统及方法,该煤矿井下场景重建系统包括:多源融合传感器,安装于足式机器人,用于在所述足式机器人沿预设行进路线行进时,采集井下作业场景的场景空间数据和视觉监测数据;边缘智能计算终端,与所述多源融合传感器连接,用于根据所述场景空间数据和视觉监测数据构建导航地图,并基于所述导航地图和所述场景空间数据进行煤矿井下场景数字化重建。本申请能够充分利用足式机器人复杂地形适应能力,协助进行煤矿井下多场景数字化重建,对煤矿井下场景进行全面、准确智能监测,有效推动透明矿井建设,并减轻人工劳动强度。
技术研发人员:吴江伟,南柄飞,韩默渊,郭志杰,叶晨曦,滕贷宇,巩文鹏
受保护的技术使用者:北京天玛智控科技股份有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!