基于相机响应模型的双优化低照度图像增强算法
本发明涉及遥感图像处理,特别涉及一种基于相机响应模型的双优化低照度图像增强算法。
背景技术:
1、不论是在日常生活中,还是空间遥感成像中,所获的图像均有成像设备与成像环境光强弱等多方面因素影响从而造成所获图像像质下降。所获图像呈现低灰度、低对比度,场景细节无法有效呈现,难以满足应用需求。
2、增强图像中的有用信息,它可以是一个失真的过程,其目的是要改善图像的视觉效果,针对给定图像的应用场合。遥感图像处理时,现有的增强技术不可避免的会引入颜色和亮度失真,并且噪声影响较大。
技术实现思路
1、本发明要有效解决现有图像的低照度技术问题,提供一种基于相机响应模型的双优化低照度图像增强算法。
2、为了解决上述技术问题,本发明的技术方案具体如下:
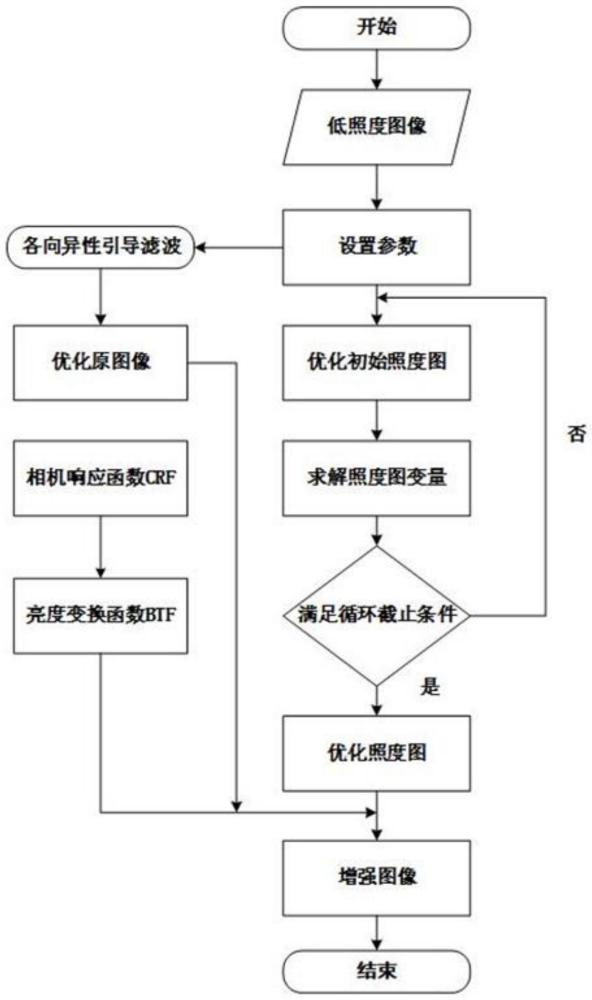
3、一种基于相机响应模型的双优化低照度图像增强算法,包括以下步骤:
4、步骤i:对原图像进行各向异性引导滤波;
5、步骤ii:通过建立lf-l1范数约束的照度优化方程;
6、步骤iii:通过利用相机响应函数求得图像。
7、在上述技术方案中,步骤i具体包括:
8、step1,读取低照度图像;
9、step2,优化原图像。
10、在上述技术方案中,步骤ii具体包括:
11、step3,建立优化照度图的约束模型;
12、step4,设置权重参数。
13、在上述技术方案中,步骤iii具体包括:
14、step5,求解的step3约束模型:
15、
16、
17、
18、ωi+1=ωiρ,ρ>1
19、step6,更新循环执行step5,直到满足循环终止条件;
20、step7,利用对step2结果的p和优化2结果的l,得到增强图像:
21、p1=g(p,k)
22、
23、其中,g表示亮度变换函数,k表示曝光比,p表示曝光时间短图像的像素值,p1表示曝光时间长图像的像素值,表示元素除法,l表示环境照度分量。
24、在上述技术方案中,step2中:
25、约束优化照度方程如下:
26、
27、其中,α表示正则化参数;表示初始照度图;l表示优化后的照度图;表示lf范数;||·||表示l1范数;为梯度算子;g为权重因子;
28、初始照度图则采用引导滤波进行3个层次的卷积;
29、对于权重g,采用中权重g包含水平方向的垂直方向的
30、
31、采用辅助变量k替换将上式改写为:
32、
33、通过构建如下的拉格朗日函数:
34、
35、其中其中<·,·>表示元素乘法,ω为惩罚因子。
36、在上述技术方案中,l的子问题求解:
37、
38、对上式求导并等于0,得:
39、
40、
41、其中,d包含了dx、dy,二者分别是水平方向与垂直方向具有正向差分的离散梯度算子的拓普利兹矩阵;
42、通过假设圆形边界条件,采用2d fft技术快速求解方程,得:
43、
44、其中表示2d fft、表示2d fft的共轭计算方式、表示2d fft逆计算方式。
45、在上述技术方案中,k的子问题求解:
46、
47、对上式进行求导并等于0,得:
48、
49、
50、对上式采用收缩方式得到:
51、
52、在上述技术方案中,z和ω的子问题求解:
53、
54、ωi+1=ωiρ,ρ>1
55、相机响应函数crf为:
56、
57、亮度变换函数btf为:
58、
59、本发明具有以下有益效果:
60、本发明的基于相机响应模型的双优化低照度图像增强算法,在相机响应模型的基础上采用双优化的方式增强图像。首先,采用各项异性引导滤波对原图像进行优化旨在保留图像细节信息的同时减少噪声。其次,通过建立lf-l1范数约束的照度图优化方程,优化初始照度图和权重的方式旨在保留照度图的结构信息并使其更加平滑。
61、本发明的基于相机响应模型的双优化低照度图像增强算法,采用交替方向乘子法(alternating direction method of multipliers,admm)依次求解所需变量。本发明可以实现有效增强图像的同时减少噪声的影响,对于提高遥感图像质量以及在后期的实际应用具有重要意义。
技术特征:
1.一种基于相机响应模型的双优化低照度图像增强算法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于相机响应模型的双优化低照度图像增强算法,其特征在于,步骤i具体包括:
3.根据权利要求2所述的基于相机响应模型的双优化低照度图像增强算法,其特征在于,步骤ii具体包括:
4.根据权利要求3所述的基于相机响应模型的双优化低照度图像增强算法,其特征在于,步骤iii具体包括:
5.根据权利要求2所述的基于相机响应模型的双优化低照度图像增强算法,其特征在于,step2中:
6.根据权利要求5所述的基于相机响应模型的双优化低照度图像增强算法,其特征在于,
7.根据权利要求5所述的基于相机响应模型的双优化低照度图像增强算法,其特征在于,
8.根据权利要求5所述的基于相机响应模型的双优化低照度图像增强算法,其特征在于,
技术总结
本发明涉及一种基于相机响应模型的双优化低照度图像增强算法,涉及遥感图像处理技术领域,为了有效解决现有的图像低照度问题。一种基于相机响应模型的双优化低照度图像增强算法,包括以下步骤:对原图像进行各向异性引导滤波;通过建立L<subgt;F</subgt;‑L<subgt;1</subgt;范数约束的照度优化方程;通过利用相机响应函数求得图像。本发明的基于相机响应模型的双优化低照度图像增强算法,采用交替方向乘子法(Alternating Direction Method of Multipliers,ADMM)依次求解所需变量。本发明可以实现有效增强图像的同时减少噪声的影响,对于提高遥感图像质量以及在后期的实际应用具有重要意义。
技术研发人员:郑亮亮,杨彪,朴永杰,冯汝鹏,陶淑苹
受保护的技术使用者:中国科学院长春光学精密机械与物理研究所
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!