基于深度神经网络自监督学习的环境声学反演方法与流程
本发明涉及一种海洋环境声学反演技术,是一种基于深度神经网络自监督学习的环境声学反演方法。
背景技术:
1、海水声速剖面、海表面、海底底质特性、海底地形地貌等是影响水下声传播的重要环境因素。声源跟踪定位和阵列信号处理等都依赖于对海洋环境参数的准确估计。通常,海洋环境参数可以由直接测量和反演两种方法得到。声波在传播过程中可以覆盖很大范围的海域,从而可以携带大量的海洋信息,使得反演海洋环境参数成为可能。传统反演方法通过bartlett滤波器构造代价函数,从而在参数空间寻找一组代价函数的最优解。由于该方法需要多次进行预报场的估计,当所处理观测数据的数据量较大、或待反演参数的维度较高时,全局搜索算法的计算量也将非常大。
2、利用深度学习的方法可以减小计算量,提高计算速度和精度。本发明将水声传播物理模型引入深度学习模型构建和训练过程形成自监督学习机制。水声传播物理模型构建是一个正向预测过程,描述复杂海洋声场环境变化、耦合规律,对观测信号进行模拟预测;深度学习模型是一个反向感知过程,以接收的水声场表达信息为基础,通过目标激发的声场实现目标深度和距离的感知。利用实际观测信息和网络预测信息的误差,通过正向预测和反向感知过程形成闭环,物理模型正向预测与反向感知迭代协同自监督学习的方式进行深度神经网络模型训练。这种学习方法引入知识约束目标参数求解空间。在观测信息有限的情况下,为实现稳健的环境感知提供了可能。
技术实现思路
1、本发明的目的是提供一种基于深度神经网络自监督学习的环境声学反演方法,该学习过程是一种在少量实际观测样本甚至无实际观测样本情况下的自学习模式,能为复杂环境下水声目标感知定位建立模型基础,极大增强模型的环境适应性和推广性。
2、本发明的技术方案为:
3、一种基于深度神经网络自监督学习的环境声学反演方法,包括如下步骤:
4、1)构建物理模型:根据实际声纳阵列类型,构建水声环境与声纳阵列耦合的声场物理模型;
5、2)生成仿真数据:利用步骤1)构建的物理模型,生成不同水声环境和不同声源参数下的仿真数据;
6、3)构建并进行深度神经网络预训练:构建深度神经网络,并利用步骤2)仿真生成的数据预训练深度神经网络;
7、4)构建自监督深度学习模型:利用步骤1)构建的物理模型与步骤3)预训练的深度神经网络构建自监督深度学习模型;
8、5)自监督深度学习模型的迭代训练:将水声场观测数据输入到步骤4)构建的自监督深度学习模型中,迭代训练深度神经网络模型;
9、6)停止训练及获取反演结果:设置判决准则,使深度神经网络停止迭代,并获得反演的环境参数。
10、本发明的特点为:
11、1.以深度神经网络模型和水声传播物理模型为核心,以声场观测、声源和环境感知结果为输入构建水声传播物理模型驱动的自监督深度学习模型;
12、2.以物理模型重构的声场观测值为训练数据,以深度神经网络的估计值为监督,实现自监督深度学习模型的迭代训练;
13、3.引入闭环自监督深度学习模型的判停准则,当模型停止迭代时,深度神经网络的输出即为目标声源的距离和深度。
14、本发明通过正向预测和反向感知过程形成闭环,以正向预测与反向感知迭代协同自监督学习的方式进行深度神经网络模型训练,是一种在少量实际观测样本甚至无实际观测样本情况下的自学习模式,增强了深度神经网络模型的环境适应性和推广性,并提高复杂环境下环境反演的精度。
技术特征:
1.一种基于深度神经网络自监督学习的环境声学反演方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于深度神经网络自监督学习的环境声学反演方法,其特征在于:所述步骤1)中,声传播模型包括射线模型、简正波模型、抛物方程模型,水声传播模型的输入包括声源距离、声源深度、接收深度、信号频率、声速剖面、水深、水底质声速、水底底质密度,水声传播模型的输出为频域声压。
3.根据权利要求1所述的基于深度神经网络自监督学习的环境声学反演方法,其特征在于:所述步骤1)中,在浅海和低频条件下,与距离无关选择简正波模型,与距离有关选择抛物方程模型;在浅海和高频条件下,与距离无关选择简正波模型,与距离有关选择射线模型;在深海和低频条件下,与距离无关选择简正波模型,与距离有关选择抛物方程模型;在深海和高频条件下,与距离无关或有关均选择射线模型。
4.根据权利要求1至3任一项所述的基于深度神经网络自监督学习的环境声学反演方法,其特征在于:所述步骤1)中,设阵列中第n个阵元的传递函数(频域)为fn,则
5.根据权利要求1所述的基于深度神经网络自监督学习的环境声学反演方法,其特征在于:所述步骤2)中,利用步骤1)构建的物理模型生成大量不同声源距离、声源深度、接收深度、信号频率、声速剖面、水深、水底质声速、水底质密度的仿真声纳阵元域声压信号,同时保存对应仿真声压信号的环境信息。
6.根据权利要求1所述的基于深度神经网络自监督学习的环境声学反演方法,其特征在于:所述步骤3)中,所述深度神经网络为卷积神经网络或循环神经网络,并且所构建的网络为监督学习网络,以及设计的神经网络为单输出的神经网络或多输出的神经网络,其中单输出的神经网络根据估计的参数个数构建多个网络。
7.根据权利要求1所述的基于深度神经网络自监督学习的环境声学反演方法,其特征在于:所述步骤3)中,构建的深度神经网络的输入为预处理后的声纳阵列阵元信号,输入到网络之前首先进行归一化处理,
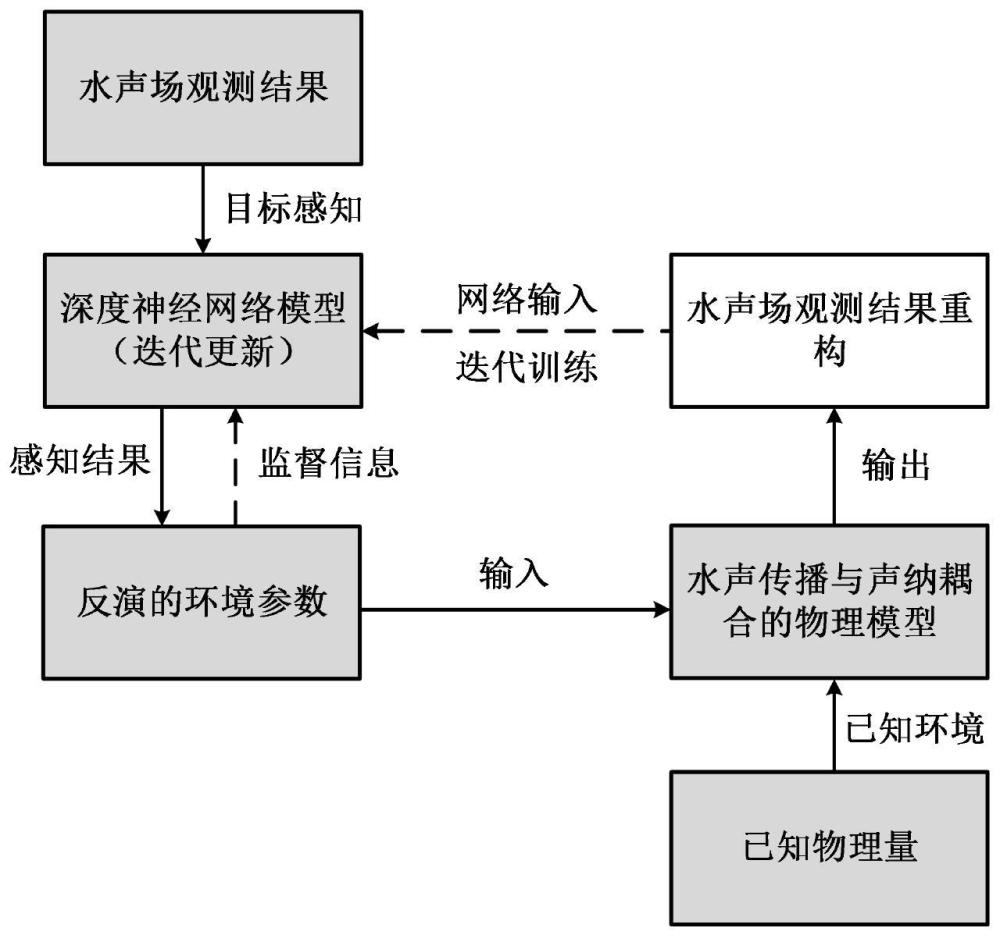
8.根据权利要求1所述的基于深度神经网络自监督学习的环境声学反演方法,其特征在于:所述步骤4)中,构建的自监督深度学习模型核心为深度神经网络模型和水声传播物理模型,深度神经网络模型的输入包括水声场观测结果和水声场观测重构结果,水声环境反演结果为深度神经网络模型参数估计状态下的输出,是水声传播物理模型的输入,也是训练状态下深度神经网络的监督标签;水声传播物理模型的输入参数包括声源距离、声源深度、接收深度、信号频率、声速剖面、水深、水底质密度,这些输入参数在自监督学习中作为已知物理量,这些已知物理量与深度神经网络输出的水声环境反演参数一并输入到水声传播物理模型中,重构的声场观测结果既作为训练状态下深度神经网络的输入,也用来评价深度神经网络训练的完成程度。
9.根据权利要求1所述的基于深度神经网络自监督学习的环境声学反演方法,其特征在于:所述步骤5)中,先将声场观测结果输入到预训练的深度神经网络模型中,网络输出反演的环境参数,再将网络估计结果与步骤4)的已知物理量一同输入到水声传播与声纳耦合的物理模型中得到重构的声场观测值,将此重构的声场观测值作为深度神经网络模型的输入,将深度神经网络输出的反演环境参数作为监督标签对预训练深度神经网络进行训练更新;训练完成后,将声场观测结果输入到再训练的深度神经网络中,重复上述过程,完成又一轮的迭代更新。
10.根据权利要求1所述的基于深度神经网络自监督学习的环境声学反演方法,其特征在于:所述步骤6)中,判断深度神经网络训练完成的评价标准包括声场观测结果与声场观测重构结果相似度或其部分特征达到一定标准或者迭代轮数达到设定值两种,训练停止后深度神经网络的输出即为反演的环境参数。
技术总结
本发明公开了一种基于深度神经网络自监督学习的环境声学反演方法,包括构建物理模型、生成仿真数据、构建并进行深度神经网络预训练、构建自监督深度学习模型、自监督深度学习模型的迭代训练、停止训练及获取反演结果等步骤。本发明通过正向预测和反向感知过程形成闭环,以正向预测与反向感知迭代协同自监督学习的方式进行深度神经网络模型训练,是一种在少量实际观测样本甚至无实际观测样本情况下的自学习模式,增强了深度神经网络模型的环境适应性和推广性,并提高复杂环境下环境反演的精度。
技术研发人员:曹怀刚,潘悦,王强,吴玺宏,曲天书
受保护的技术使用者:中国船舶集团有限公司第七一五研究所
技术研发日:
技术公布日:2024/6/11
- 还没有人留言评论。精彩留言会获得点赞!