一种基于局部迭代策略的大场景SAR影像配准的方法及装置与流程
本发明属于合成孔径雷达(synthetic aperture radar,dssar)影像数据处理领域,具体涉及一种基于局部迭代策略的大场景sar影像配准的方法及装置。
背景技术:
1、数字高程模型(digital elevation model,dem)是描述裸地球高程的三维数字模型。高分辨率、高精度dem在经济建设、军事国防等方面发挥重大作用。干涉合成孔径雷达(interferometry synthetic aperture radar,insar)由于具备全天候、高精度、大区域成像等优势已经成为获取dem的重要手段。在使用insar手段生产dem时,insar影像配准是其最基础及关键的一个步骤,其配准精度通常要达到亚像素级别,实际中一般要求其配准精度达到八分之一像素以上。对于小场景sar数据,通过全局分级的策略进行配准一般能达到八分之一像素以上,但是由于在大场景insar成像中,受系统和观测地物影响,不同图像区域像素失配往往不同且变化复杂,该策略无法保证若干局部区域配准精度满足要求,进而配准精度的不达标会影响dem的质量甚至造成dem生产失败。
技术实现思路
1、针对上述问题,本发明提供一种基于局部迭代策略的大场景sar影像配准的方法及装置,可以提升大场景sar影像配准质量。一种基于局部迭代策略的大场景sar影像配准方法,所述方法包括:
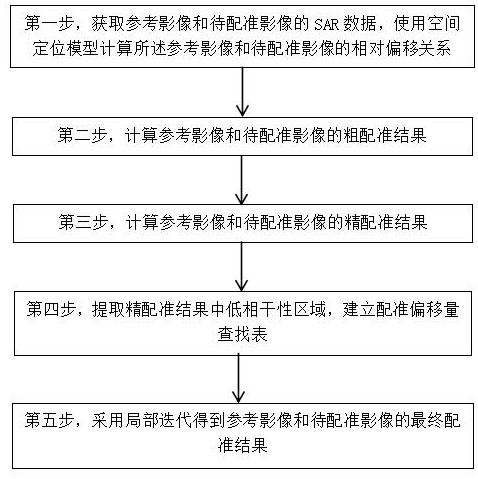
2、获取参考影像和待配准影像的sar数据,使用空间定位模型计算所述参考影像和待配准影像的相对偏移关系。
3、计算参考影像和待配准影像的粗配准结果,在所述参考影像上随机选取一个控制点,在所述相对偏移关系基础上对选取的控制点采用基于傅里叶变换的相关系数法计算,得到参考影像和待配准影像的粗配准结果。
4、计算参考影像和待配准影像的精配准结果,在所述参考影像上均匀选取多个控制点,在所述粗配准结果基础上对选取的控制点采用基于傅里叶变换的相关系数法计算得到各控制点的相对偏移关系并计算各控制点的相对偏移关系周围像素的相关系数,根据所述相关系数构建二元二次曲面,对所述曲面进行极大值求解,得到各控制点精确相对偏移关系,基于所述各控制点精确相对偏移关系建立所述参考影像和待配准影像之间的映射关系,根据所述映射关系采用双线性插值法重采样得到所述参考影像和待配准影像的精配准结果。
5、提取精配准结果中低相干性区域,建立配准偏移量查找表,计算精配准结果的相干性并制作相干性掩模图,采用八邻域联通法提取所述相干性掩模图中低相干性区域。
6、采用局部迭代得到参考影像和待配准影像的最终配准结果,对低相干性区域循环迭代进行精配准计算、更新配准偏移量查找表及低相干性区域提取,当低相干性区域的大小满足预先设置的判断条件停止迭代,得到参考影像和待配准影像的最终配准结果。
7、优选的,所述使用空间定位模型计算所述参考影像和待配准影像的相对偏移关系,包括:首先,计算参考影像中心点对应地面点的空间直角坐标,
8、,
9、其中 x p 、y p 、z p分别为地面点的空间直角坐标, b、l、h分别为大地纬度、经度、高, n为地面点的参考椭球卯酉圈曲率半径;
10、然后,获取待配准影像的卫星对所述地面点成像时的雷达瞬时位置,
11、,
12、,
13、,
14、其中和 分别表示地面点和卫星的空间直角坐标,表示待配准影像卫星的速度矢量, t表示卫星成像时间,是电磁波波长,是多普勒频率,待配准影像卫星到地面点的斜距,a和b分别表示wgs-84参考椭球的长、短半轴,h为地面点的大地高,为拟合的多项式系数,采用牛顿迭代法进行求解。
15、计算所述地面点在待配准影像中的像素坐标,得到所述参考影像和待配准影像的相对偏移关系;
16、,
17、式中, r 0为卫星成像的近斜距, t 0为成像时间, ∆r和 ∆t分别为距离向每列斜距长度和方位相每行成像时间, r s和 c s分别为参考影像中心点在待配准影像的行列号。
18、优选的,所述基于傅里叶变换的相关系数法为:
19、,
20、其中, fft表示傅里叶正变换, fft -1表示傅里叶逆变换, s1和 s2分别表示参考影像的小块和待配准影像的小块, c( r0, c0)为参考影像和待配准影像的粗配准结果。
21、优选的,所述基于所述各控制点精确相对偏移关系建立所述参考影像和待配准影像之间的映射关系,包括:
22、将各控制点精确相对偏移关系带入多项式通过最小二乘得到多项式系数,建立参考影像和待配准影像之间的映射关系,所述多项式为
23、
24、其中, ∆cs, ∆rs分别表示控制点在待配准影像上相对参考影像的列、行偏移量,cm,rm分别表示参考影像上控制点的列号和行号,b0,b1,b2,b3,b4,b5和a0,a1,a2,a3,a4,a5均为偏移多项式系数。
25、优选的,所述配准偏移量查找表大小与所述参考影像大小一致,实部和虚部都为0的复数矩阵,实部为方位向的偏移量,虚部为距离向的偏移量。
26、优选的,所述制作相干性掩模图具体是先设置相干性阈值,然后利用二值化公式对相干性图进行二值化得到相干性掩模图,所述低相干性区域具体为取值为0的区域。
27、为了实现上述基于局部迭代策略的大场景sar影像配准方法,本发明还相应提供一种基于局部迭代策略的大场景sar影像配准装置,所述装置包括:
28、概略配准模块,用于获取参考影像和待配准影像的sar数据,使用空间定位模型计算所述参考影像和待配准影像的相对偏移关系。
29、粗配准模块,用于计算参考影像和待配准影像的粗配准结果,在所述参考影像上随机选取一个控制点,在所述相对偏移关系基础上对选取的控制点采用基于傅里叶变换的相关系数法计算,得到参考影像和待配准影像的粗配准结果。
30、精配准模块,用于计算参考影像和待配准影像的精配准结果,在所述参考影像上均匀选取多个控制点,在所述粗配准结果基础上对选取的控制点采用基于傅里叶变换的相关系数法计算得到各控制点的相对偏移关系并计算各控制点的相对偏移关系周围像素的相关系数,根据所述相关系数构建二元二次曲面,对所述曲面进行极大值求解,得到各控制点精确相对偏移关系,基于所述各控制点精确相对偏移关系建立所述参考影像和待配准影像之间的映射关系,根据所述映射关系采用双线性插值法重采样得到所述参考影像和待配准影像的精配准结果。
31、基于局部迭代的配准模块,用于提取精配准结果中低相干性区域及采用局部迭代得到参考影像和待配准影像的最终配准结果,建立配准偏移量查找表,计算精配准结果的相干性并制作相干性掩模图,采用八邻域联通法提取所述相干性掩模图中低相干性区域,对低相干性区域循环迭代进行精配准计算、更新配准偏移量查找表及低相干性区域提取,当低相干性区域的大小满足预先设置的判断条件停止迭代,得到参考影像和待配准影像的最终配准结果。
32、本发明还提供一种电子设备,包括存储器及处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器实现如上述中任一项所述的方法。
33、本发明还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述中任一项所述的方法。
34、本发明考虑了大场景sar成像中受系统和观测地物影响导致不同图像区域的像素失配,单一的全局分级策略无法保证若干局部区域配准精度满足要求,在全局分级策略的基础上通过局部迭代来对若干局部区域的配准质量进行控制能够满足要求的精度,本发明为探索大场景sar影像高精度配准提供了一种新的思路和手段,未来可以广泛应用于国产卫星的大场景sar影像高精度配准研究等方面。
- 还没有人留言评论。精彩留言会获得点赞!