一种基于高精定位的植物空间格局标定方法与流程
本发明属于生态调查评估,具体涉及一种基于高精定位的植物(树木)空间格局标定方法。
背景技术:
1、植物的空间格局主要包括均匀型分布、随机型分布和聚集型分布等三种类型。当前,在生态调查评估领域,植物空间格局调查评估主要采取人工样方调查的方法,即在野外调查区域用样方绳建立一定面积的正方形或长方形样方,定义样方的一个角为原点,与原点相连的样方边框为x轴和y轴,用皮尺或钢卷尺量取样方内植株在x轴和y轴上的相对于原点的坐标位置。然而,此方法操作繁琐,需要花费大量时间,且在样方面积较大的情况下获得的植株坐标位置误差很大。
2、现有方案中,文献cn110036863b公开了一种喀斯特石漠化地区地形和植物群落空间结构测定方法,包括步骤:选取样方地,划分亚样方;准备仪器;测定样方地,并延伸测量喀斯特地区独有的石沟、石缝、石槽和石洞等微地形以及山脊、山谷等特征地形;对胸径≥1cm的林木进行空间坐标测定;计算两林木间距离;判定植物群落的空间分布特征。然鹅,该方法依然需要操作人员逐个在样方内测定植物参数,实施效率依然很低。
3、更关键地是,由于很多地区的相邻植物(林木)生长得比较茂密,且枝叶交叉生长的情况也不少,即使借助于现有的高清摄像终端和图像识别系统,在植物空间格局标定过程中依然面临无法快速、准确地进行标定的技术难点。
技术实现思路
1、至少为了解决背景技术中提到的技术问题,本发明目的在于提供一种基于高精定位的植物空间格局标定方法。
2、本发明采用了如下技术方案。
3、一种基于高精定位的植物空间格局标定方法,步骤包括:
4、步骤1,根据需求确定样方区域;
5、步骤2,根据样方区域的边界构建数字围栏;
6、步骤3,结合所得数字围栏构建三维坐标系,数字围栏的两个相邻边界作为三维坐标系的x轴、y轴,三维坐标系的z轴自数字围栏所在平面向下延伸;
7、步骤4,在三维坐标系中生成参照线,横向参照线与x轴或y轴平行,竖向参照线与z轴平行,并将数字围栏范围内划分为若干区域,每间隔n米设置一条参照线;
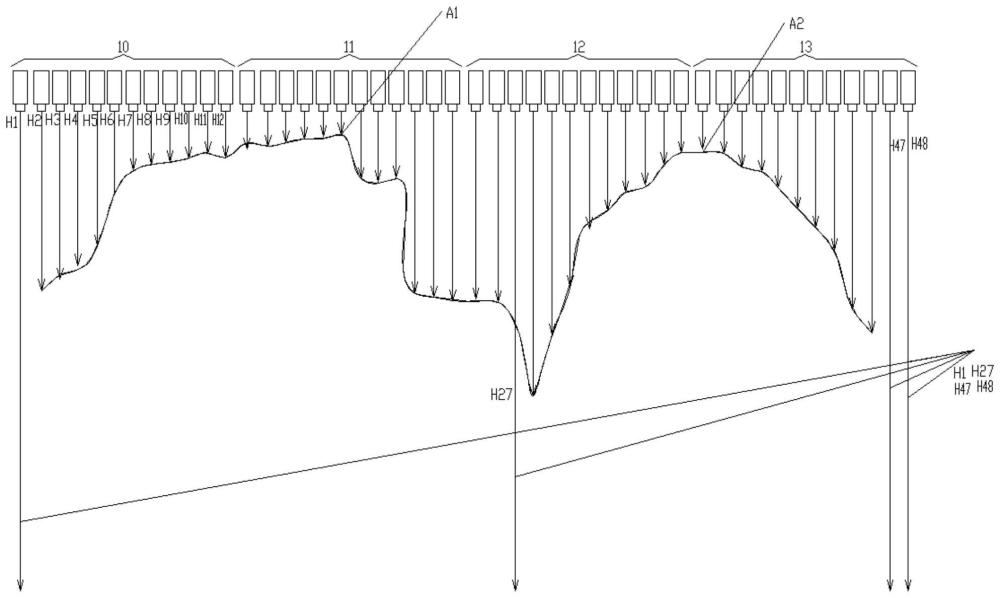
8、步骤5,沿着数字围栏的边界和横向参照线设定无人机飞行线路,并结合定位系统,将该飞行线路与样方区域对应的点位进行匹配;无人机上搭载有多个直线、紧挨排列的测距传感器,测距传感器的光路竖直向下;
9、步骤6,控制无人机按照设定路径在样方区域上方匀速飞行,并实时获取测定的距离数据;
10、步骤7,将所得距离数据导入数字围栏中,并生成所得距离数据对应的竖直线条;
11、步骤8,将所有竖直线条的下端点拟合,形成曲面;
12、步骤9,将所得曲面上的“伞状”结构定义为一个单元,作为一株虚拟植物,由所有虚拟植物共同构成样方模型,并标定“伞状”结构顶点处的坐标作为该植物的空间位置。
13、本发明中,测定距离数据的过程中,无人机飞行路径包括若干平行排列的直线路径。
14、作为优选方案,无人机上搭载有10-30个直线、紧挨排列的测距传感器,相邻测距传感器的光路间距不大于15cm。
15、进一步地优选方案之一,在无人机上还搭载有用于识别植物种类的多光谱相机,在获取测定距离数据的过程中,同步获取植物种类信息。
16、进一步地优选方案之二,在无人机上还搭载有用于识别植物种类的多光谱相机;将步骤9中所有“伞状”结构顶点处设为目标点,在步骤9实施后,控制无人机再次飞行至各目标点对应的样方区域内植物所在位置正上方,用于获取“伞状”结构对应的植物种类,并将所得植物种类信息标定在相应位置。
17、进一步地,还包括步骤10:从所得距离数据中筛选出数值最大的数据组,然后以数值最大的数据组的平均值作为x轴、y轴所在平面距离地面的高度,然后从“伞状”结构顶点处往地面延伸生成虚拟植物主干。
18、有益效果:采用本发明的方案,不仅大幅降低了植物空间格局标定的操作难度,而且显著缩短了植物空间格局标定所需的时间,提高了实施效率,便于快速、准确地进行标定,更关键地是,在无需操作人员去现场逐个标定的情况下能够针对大面积(面积不小于100m*100m)样方内的植物进行精确地标定。
技术特征:
1.一种基于高精定位的植物空间格局标定方法,其特征在于,步骤包括:
2.根据权利要求1所述的植物空间格局标定方法,其特征在于:测定距离数据的过程中,无人机飞行路径包括若干平行排列的直线路径。
3.根据权利要求2所述的植物空间格局标定方法,其特征在于:无人机上搭载有10-30个直线、紧挨排列的测距传感器,相邻测距传感器的光路间距不大于15cm。
4.根据权利要求3所述的植物空间格局标定方法,其特征在于:在无人机上还搭载有用于识别植物种类的多光谱相机,在获取测定距离数据的过程中,同步获取植物种类信息。
5.根据权利要求3所述的植物空间格局标定方法,其特征在于:在无人机上还搭载有用于识别植物种类的多光谱相机;将步骤9中所有“伞状”结构顶点处设为目标点,在步骤9实施后,控制无人机再次飞行至各目标点对应的样方区域内植物所在位置正上方,用于获取“伞状”结构对应的植物种类,并将所得植物种类信息标定在相应位置。
6.根据权利要求1-5任一项所述的植物空间格局标定方法,其特征在于,还包括步骤10:从所得距离数据中筛选出数值最大的数据组,然后以数值最大的数据组的平均值作为x轴、y轴所在平面距离地面的高度,然后从“伞状”结构顶点处往地面延伸生成虚拟植物主干。
技术总结
本发明提供了一种基于高精定位的植物空间格局标定方法,步骤包括:根据样方区域的边界构建数字围栏、三维坐标系,设定无人机飞行线路,并结合定位系统,将该飞行线路与样方区域对应的点位进行匹配,控制无人机按照设定路径在样方区域上方飞行并实时获取测定的距离数据,将所得距离数据导入数字围栏中,并生成所得距离数据对应的竖直线条,将所有竖直线条的下端点拟合形成曲面;将所得曲面上的“伞状”结构定义为一个单元,作为一株虚拟植物,并标定“伞状”结构顶点处的坐标作为该植物的空间位置。本发明不仅大幅降低了植物空间格局标定的操作难度,而且显著缩短了植物空间格局标定所需的时间,提高了实施效率,便于快速、准确地进行标定。
技术研发人员:司洪涛,刘江,李成,朱冬雪,马磊,王科,王琛,李惠敏,严有龙,毛铮,徐召雷,徐泽铭
受保护的技术使用者:重庆地质矿产研究院
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!