一种基于改进正交匹配跟踪重构算法的时延估计方法
本发明涉及信号处理,具体为一种基于改进正交匹配跟踪重构算法的时延估计方法。
背景技术:
1、时延估计被广泛应用于雷达、声纳和无线定位等领域,复杂环境下的时延估计算法研究是该领域的研究重点.现有时延估计方法可分为五类:相关法、高阶累积量法、自适应法、最大似然法和子空间法、相关法原理简单、工程实现容易,但要求信号与噪声之间互不相关;高阶累积量法消除了高斯噪声的影响,但计算复杂度较高;自适应法能够调整滤波器参数跟踪时变的时延,但估计精度受初值影响容易陷入局部收敛;最大似然类方法作为理论最优算法,性能在低信噪比下依旧可以逼近克拉美罗界(cramér-rao bound,crb),但该方法需要网格搜索复杂度较高;子空间法具有超分辨能力,但在小样本、低信噪比的条件下性能大大下降。
2、压缩感知理论的提出突破了奈奎斯特采样定理的限制,仅需信号满足稀疏性,就可以远低于奈奎斯特采样定理要求的频率进行采样,再利用重构算法就可以准确重构出原始信号或信号的相关参数。稀疏信号的重构是压缩感知研究的关键内容,但该方法在选取原子的过程中有一定概率选择次优原子导致估计结果的不准确。导致存在精度不高甚至失效以及运算速度慢的问题。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于改进正交匹配跟踪重构算法的时延估计方法,解决了现有时延估计方法大都存在精度不高以及运算速度慢的问题。
3、(二)技术方案
4、本发明为了实现上述目的具体采用以下技术方案:
5、一种基于改进正交匹配跟踪重构算法的时延估计方法,包括以下步骤,
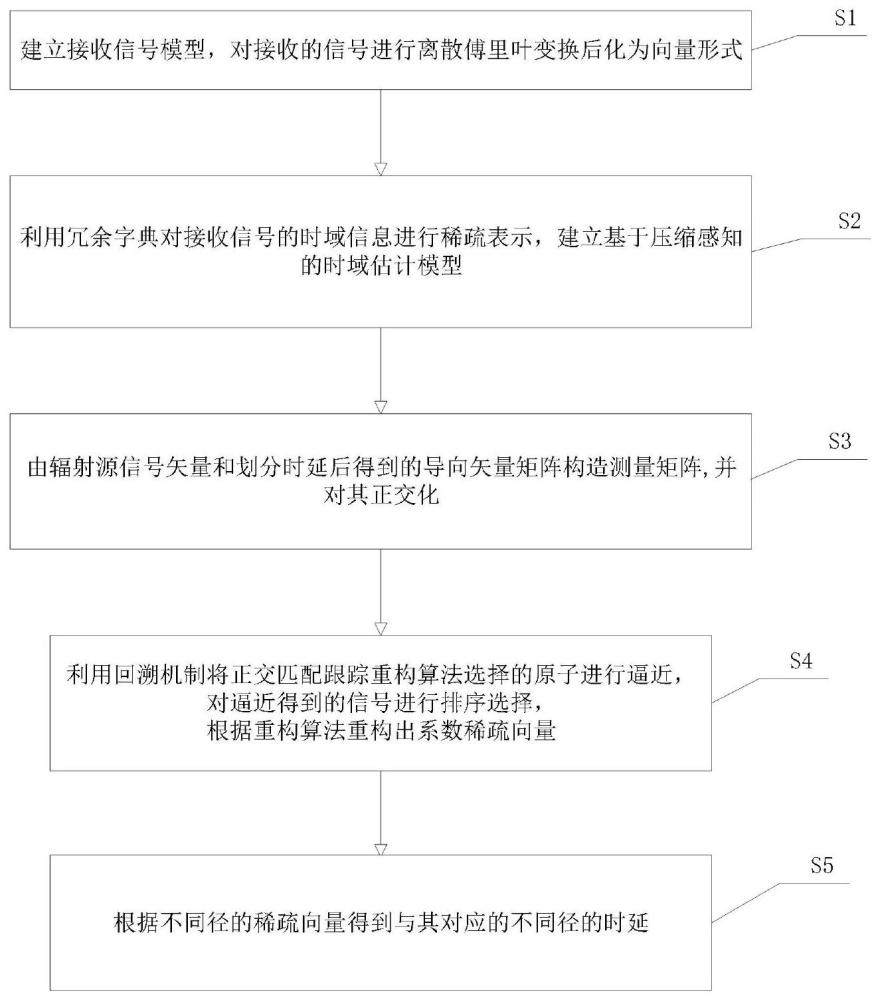
6、s1:建立接收信号模型,对接受的信号进行离散傅里叶变换后化为向量形式;
7、s2:利用冗余字典对接收信号的时域信息进行稀疏表示,建立基于压缩感知的时延估计模型;
8、s3:由辐射源信号矢量s和划分时延后得到的导向矢量矩阵构造测量矩阵并对其正交化得到正交化测量矩阵φ;
9、s4:利用回溯机制将正交匹配跟踪重构算法选择的原子进行逼近,对逼近得到的信号进行排序选择,;
10、s5:使用重构算法重构出系数稀疏向量,根据不同径的稀疏向量得到与其对应的不同径的时延。
11、进一步地,所述步骤s1中,建立接收信号模型,其中为测量矩阵,其维度为m×k,为压缩感知时延估计在测量矩阵下的观测信号,l为快拍数,为冗余字典,维度为k×n,n为时域划分的时延数,为感知矩阵,维度为m×n,为待估计的稀疏向量,其中每列均与具有相同的形式,包含了时延的位置信息,w为观测噪声。
12、进一步地,所述步骤s3中,将测量矩阵φ0的第一行向量根据进行单位化,得到第一行正交结果,由u={uj|uj=|<y,φj>|,j=1,2,…,n}计算φ0第二行向量在第一行向量正交化结果向量上的投影u,并由计算第二行向量与这个投影的差值,对差值进行单位化得到第二行向量正交化的结果,依次类推,直到计算出所有k行向量的正交化结果得到正交化测量矩阵φ。
13、进一步地,所述步骤s5中,利用u={uj|uj=|<y,φj>|,j=1,2,…,n}计算投影值u,并对u排序,选择2lp个最大值对应的索引值存入第t次迭代的索引集集合λt,更新索引集以及索引集对应的测量矩阵中的原子集合,利用逼近信号,并对信号集合排序选择前lp个最大元素,将对应原子存入矩阵,lp为多径数。
14、(三)有益效果
15、与现有技术相比,本发明提供了一种基于改进正交匹配跟踪重构算法的时延估计方法,具备以下有益效果:
16、本发明改善了传统时延估计方法在小样本、低信噪比下精度下降与复杂度较高等问题,同时改善了对噪声敏感的问题。
17、本发明提出的改进正交匹配跟踪重构算法的时延估计方法,改善了现有基于压缩感知的时延估计算法存在估计准确度不高的问题。所提算法采用一种自然对数复合函数近似范数,将求解范数问题转化为近似函数的最优化问题。最后通过优化求解获得目标时延的估计值。与传统范数时延估计算法相比具有更好的估计性能。
技术特征:
1.一种基于改进正交匹配跟踪重构算法的时延估计方法,其特征在于:包括以下步骤,
2.根据权利要求1所述的一种基于改进正交匹配跟踪重构算法的时延估计方法,其特征在于:所述步骤s1中,建立接收信号模型,其中为测量矩阵,其维度为m×k,为压缩感知时延估计在测量矩阵下的观测信号,l为快拍数,为冗余字典,维度为k×n,n为时域划分的时延数,为感知矩阵,维度为m×n,为待估计的稀疏向量,其中每列均与具有相同的形式,包含了时延的位置信息,w为观测噪声。
3.根据权利要求1所述的一种基于改进正交匹配跟踪重构算法的时延估计方法,其特征在于:所述步骤s3中,将测量矩阵φ0的第一行向量根据进行单位化,得到第一行正交结果,由u={uj|uj=|<y,φj>|,j=1,2,…,n}计算φ0第二行向量在第一行向量正交化结果向量上的投影u,并由计算第二行向量与这个投影的差值,对差值进行单位化得到第二行向量正交化的结果,依次类推,直到计算出所有k行向量的正交化结果得到正交化测量矩阵φ。
4.根据权利要求1所述的一种基于改进正交匹配跟踪重构算法的时延估计方法,其特征在于:所述步骤s4中,利用u={uj|uj=|<y,φj>|,j=1,2,…,n}计算投影值u,并对u排序,选择2lp个最大值对应的索引值存入第t次迭代的索引集集合λt,更新索引集以及索引集对应的测量矩阵中的原子集合,利用逼近信号,并对信号集合排序选择前lp个最大元素,将对应原子存入矩阵,lp为多径数。
技术总结
本发明属于信号处理技术领域,尤其为一种基于改进正交匹配跟踪重构算法的时延估计方法,包括以下步骤,S1:建立接收信号模型,对接受的信号进行快速傅里叶变换后化为向量形式;S2:利用冗余字典对接收信号的时域信息进行稀疏表示,建立基于压缩感知的时延估计模型;S3:由辐射源信号矢量S和划分时延后得到的导向矢量矩阵构造测量矩阵并对其正交化得到Φ;S4:利用回溯机制将正交匹配跟踪重构算法选择的原子进行逼近,对逼近得到的信号进行排序选择;S5:根据重构算法重构出系数稀疏向量S6:根据不同径的稀疏向量得到与其对应的不同径的时延本发明改善了传统时延估计方法在单快拍、低信噪比条件下精度下降等问题,改善了算法对噪声敏感的问题。
技术研发人员:刘小松,吕悦,单泽彪,刘云清
受保护的技术使用者:长春理工大学
技术研发日:
技术公布日:2024/6/2
- 还没有人留言评论。精彩留言会获得点赞!