一种地下管线路段挖掘机检测方法及系统
本发明属于地下管线检测,具体涉及一种地下管线路段挖掘机检测方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、随着社会进步与信息技术的高速发展,地下管线铺设的广度与密度都在不断增加。在城市安全运作过程中,保障地下管线的正常工作是非常重要的。若地下管线发生故障,可能会导致城市的供水、排水,运送燃气、电力等功能无法正常运作,严重影响城市资源的传输,甚至会影响到人们的日常生活及城市的稳定运行。近年来智能化、信息化发展进程加速,地下管线的智能化分析及预警系统成为新时代通信系统中的重要工具。
3、城市建设的快速发展扩大了城市地下管线的规模。在城市建设中,很多工程公司不规范,野蛮作业,会导致施工过程中地下管线的挖断;另外,有部分地下管线在最初铺设时没有预埋警示标识,或者在使用的过程中警示标识破损或消失,导致施工过程中地下管线的挖断。
4、据发明人了解,传统的地下管线保护手段智能化水平不够,只能够做到事后处理,很难做到事前防范;但是,事后处理需要消耗大量人力物力,无法保证地下管线各项功能的稳定运行。城市建设施工的过程中,一般采用挖掘机进行路面的开挖;因此,需要对开挖过程进行智能监测以免挖断地下管线。在智能监测的过程中,因监测摄像头的测距离与被监测的挖掘机大小的差异会影响检测结果,同时,在恶劣天气下摄像头的检测结果受到严重影响,这都会严重影响监测结果,造成地下管线被误挖错挖的现场,甚至会影响城市建设施工的进度。
技术实现思路
1、为了解决上述问题,本发明提出了一种地下管线路段挖掘机检测方法及系统,采用改进的yolov5算法模型构建检测模型进行检测路段挖掘机的实时监测,提高了监测精度和多种环境条件检测的适应能力。
2、根据一些实施例,本发明的第一方案提供了一种地下管线路段挖掘机检测方法,采用如下技术方案:
3、一种地下管线路段挖掘机检测方法,包括:
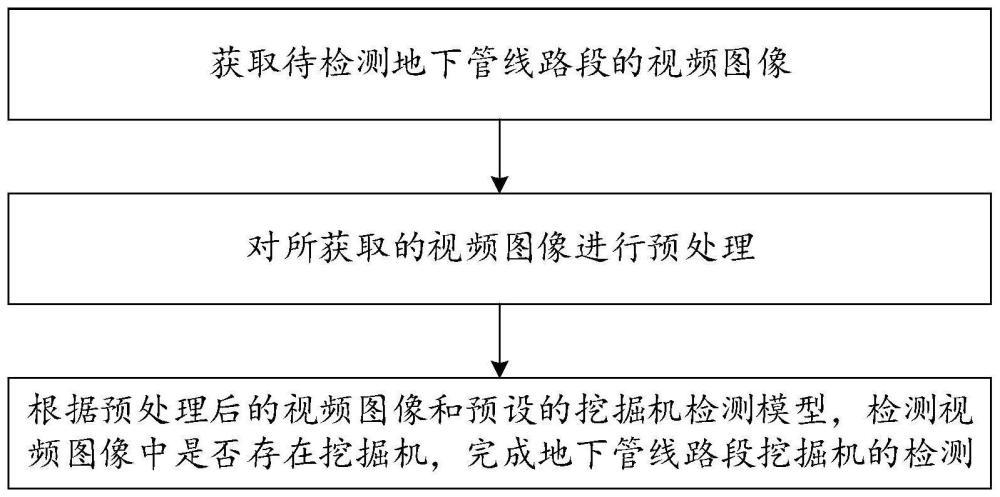
4、获取待检测地下管线路段的视频图像;
5、对所获取的视频图像进行预处理;
6、根据预处理后的视频图像和预设的挖掘机检测模型,检测视频图像中是否存在挖掘机,完成地下管线路段挖掘机的检测;
7、其中,所述挖掘机检测模型采用yolov5模型,以yolov5模型框架为主体,以c2fma网络结构代替骨干结构中的c3网络结构,以cod替换作为检测头的c3网络结构。
8、作为进一步的技术限定,所述挖掘机检测模型的训练过程为:
9、获取挖掘机图像;
10、所获取的挖掘机图像进行数据增强处理;
11、标注处理后的挖掘机图像,分割为挖掘机图像训练集、挖掘机图像验证集和挖掘机图像测试集;
12、构建待训练的挖掘机检测模型;
13、基于改进的自适应锚框算法计算锚框辅助,完成对所构建的待训练的挖掘机检测模型进行训练、验证及测试,得到训练好的挖掘机检测模型。
14、进一步的,采用改进的自适应锚框算法计算锚框辅助的过程为:
15、获取已标注的处理后挖掘机图像的宽和高;
16、根据所获取的挖掘机图片大小计算已标注的挖掘机图像的宽度和高度的比例;
17、根据所得到的宽度和高度比例进行距离的聚类,得到锚框辅助计算结果。
18、进一步的,在距离聚类的过程中,采用基于聚类相似度传播的集成聚类算法。
19、进一步的,所述数据增强至少包括图像遮挡、颜色扰动处理、图像加噪、加雾和加雨处理中的一种。
20、作为进一步的技术限定,所获取视频图像的预处理为视频图像的遮罩处理,即保留所获取视频图像中的感兴趣区域,将视频图像的尺寸大小变换到预设大小。
21、根据一些实施例,本发明的第二方案提供了一种地下管线路段挖掘机检测系统,采用如下技术方案:
22、一种地下管线路段挖掘机检测系统,包括:
23、获取模块,其被配置为获取待检测地下管线路段的视频图像;
24、预处理模块,其被配置为对所获取的视频图像进行预处理;
25、检测模块,其被配置为根据预处理后的视频图像和预设的挖掘机检测模型,检测视频图像中是否存在挖掘机,完成地下管线路段挖掘机的检测;
26、其中,所述挖掘机检测模型采用yolov5模型,以yolov5模型框架为主体,以c2fma网络结构代替骨干结构中的c3网络结构,以cod替换作为检测头的c3网络结构。
27、根据一些实施例,本发明的第三方案提供了一种计算机可读存储介质,采用如下技术方案:
28、一种计算机可读存储介质,其上存储有程序,该程序被处理器执行时实现如本发明第一方案所述的地下管线路段挖掘机检测方法中的步骤。
29、根据一些实施例,本发明的第四方案提供了一种电子设备,采用如下技术方案:
30、一种电子设备,包括存储器、处理器及存储在存储器上并在处理器上运行的程序,所述处理器执行所述程序时实现如本发明第一方案所述的地下管线路段挖掘机检测方法中的步骤。
31、根据一些实施例,本发明的第五方案提供了一种计算机程序产品,采用如下技术方案:
32、一种计算机程序产品,包括软件代码,所述软件代码中的程序执行如本发明第一方案所述的地下管线路段挖掘机检测方法中的步骤。
33、与现有技术相比,本发明的有益效果为:
34、本发明采用改进的yolov5算法模型构建挖掘机检测模型,所构建的挖掘机检测模型以yolov5模型框架为主体,以c2fma网络结构代替骨干结构中的c3网络结构,以cod替换作为检测头的c3网络结构;通过改进后的挖掘机检测模型进行检测路段挖掘机的实时监测,提高了地下管线的监测精度和多种环境条件检测的适应能力。
技术特征:
1.一种地下管线路段挖掘机检测方法,其特征在于,包括:
2.如权利要求1中所述的一种地下管线路段挖掘机检测方法,其特征在于,所述挖掘机检测模型的训练过程为:获取挖掘机图像;所获取的挖掘机图像进行数据增强处理;标注处理后的挖掘机图像,分割为挖掘机图像训练集、挖掘机图像验证集和挖掘机图像测试集;构建待训练的挖掘机检测模型;基于改进的自适应锚框算法计算锚框辅助,完成对所构建的待训练的挖掘机检测模型进行训练、验证及测试,得到训练好的挖掘机检测模型。
3.如权利要求2中所述的一种地下管线路段挖掘机检测方法,其特征在于,采用改进的自适应锚框算法计算锚框辅助的过程为:获取已标注的处理后挖掘机图像的宽和高;根据所获取的挖掘机图片大小计算已标注的挖掘机图像的宽度和高度的比例;根据所得到的宽度和高度比例进行距离的聚类,得到锚框辅助计算结果。
4.如权利要求3中所述的一种地下管线路段挖掘机检测方法,其特征在于,在距离聚类的过程中,采用基于聚类相似度传播的集成聚类算法。
5.如权利要求2中所述的一种地下管线路段挖掘机检测方法,其特征在于,所述数据增强至少包括图像遮挡、颜色扰动处理、图像加噪、加雾和加雨处理中的一种。
6.如权利要求1中所述的一种地下管线路段挖掘机检测方法,其特征在于,所获取视频图像的预处理为视频图像的遮罩处理,即保留所获取视频图像中的感兴趣区域,将视频图像的尺寸大小变换到预设大小。
7.一种地下管线路段挖掘机检测系统,其特征在于,包括:
8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现了如权利要求1-6任一项所述的地下管线路段挖掘机检测方法的步骤。
9.一种电子设备,包括存储器、处理器及存储在存储器上并在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现了如权利要求1-6任一项所述的地下管线路段挖掘机检测方法的步骤。
10.一种计算机程序产品,包括软件代码,其特征在于,所述软件代码中的程序执行如权利要求1-6任一项所述的地下管线路段挖掘机检测方法的步骤。
技术总结
本发明属于地下管线检测技术领域,具体涉及一种地下管线路段挖掘机检测方法及系统,包括:获取待检测地下管线路段的视频图像;对所获取的视频图像进行预处理;根据预处理后的视频图像和预设的挖掘机检测模型,检测视频图像中是否存在挖掘机,完成地下管线路段挖掘机的检测;其中,所述挖掘机检测模型采用Yolov5模型,以Yolov5模型框架为主体,以C2FMA网络结构代替骨干结构中的C3网络结构,以COD替换作为检测头的C3网络结构。
技术研发人员:王文宏,李晓寒
受保护的技术使用者:聊城大学
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!