一种基于BIM和物联网的智慧工地数据采集方法与流程
本发明涉及建筑施工领域,具体涉及一种基于bim和物联网的智慧工地数据采集方法。
背景技术:
1、bim技术的应用将会提升建筑工程的集成化程度,使工程从设计、施工到运营全生命周期的质量和效率都得到显著提高,可加快建筑工业化的前进步伐。bim在建筑全生命周期内,凭借可视化、模拟性、协调性、优化性、可出图性的特点,能够帮助建筑信息实现集成化,从建筑的设计、施工、运行直至建筑全寿命周期,将信息始终整合在三维模型数据库中,提高建筑工程的信息集成化程度,有助于工程项目各方主体基于bim技术进行协同工作。
2、在进行施工现场数据采集时,存在采集数据缺乏规范,录入现场数据生成的参考模型和预先建立的施工模型难以融合的问题,且生成的参考模型难以确认存在差异部位的精准坐标,无法精确的指示返工位置。
技术实现思路
1、(一)发明目的
2、为解决背景技术中存在的技术问题,本发明提出一种基于bim和物联网的智慧工地数据采集方法,具有统一采集基准点规范参考模型和参考模型和子模型融合便利方便指示待返工位置的特点。
3、(二)技术方案
4、为解决上述技术问题,本发明提供了一种基于bim和物联网的智慧工地数据采集方法,包括以下步骤:
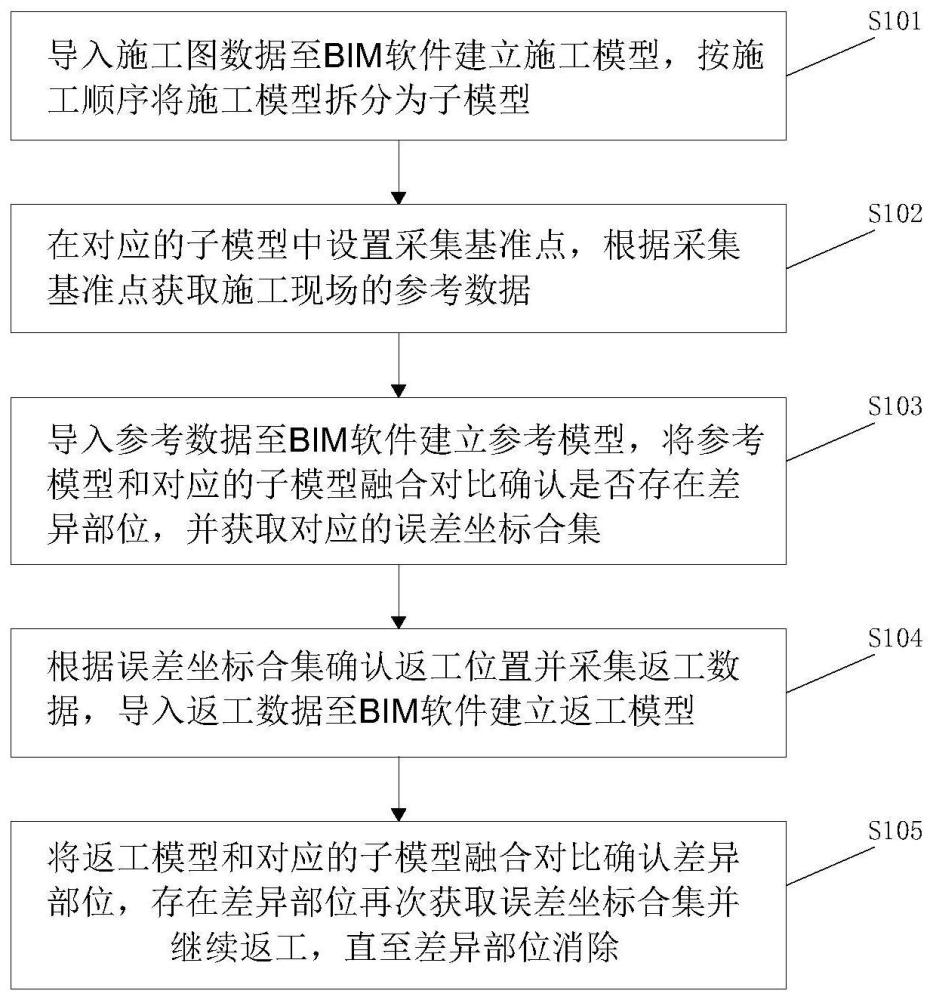
5、导入施工图数据至bim软件建立施工模型,按施工顺序将施工模型拆分为子模型;
6、在对应的子模型中设置采集基准点,根据采集基准点获取施工现场的参考数据;
7、导入参考数据至bim软件建立参考模型,将参考模型和对应的子模型融合对比确认是否存在差异部位,存在差异部位时获取对应的误差坐标合集;
8、根据误差坐标合集确认返工位置并采集返工数据,导入返工数据至bim软件建立返工模型;
9、将返工模型和对应的子模型融合对比确认差异部位,存在差异部位再次获取误差坐标合集并继续返工,直至差异部位消除。
10、优选的,施工模型按施工顺序拆分为若干个子模型,其中施工顺序在后的子模型依托在前施工顺序的子模型渲染生成。
11、优选的,采集基准点设置为子模型三维展示时x轴、y轴和z轴的起始点(x0,y0,z0),同时参考基准点对应施工现场的采集基准点,获取的参考数据应包括施工现场的全部坐标点位。
12、优选的,获取参考数据时使用的采集装置包括:传感器、摄像头、gps定位器、支架和无人机,且采集装置配置物联网模块和存储模块,获取的参考数据通过物联网模块传输和存储模块存储。
13、优选的,导入参考数据至bim软件建立参考模型,将参考模型和对应的子模型融合对比确认是否存在差异部位,不存在差异部位时按施工顺序继续施工,存在差异部位时获取对应的误差坐标合集的步骤包括:
14、依托bim软件和参考数据进行参考模型的建立;
15、参考模型和对应的子模型融合建立融合模型,融合模型同样为可视化;
16、融合模型中,重合部分满足施工标准,重影部分说明存在差异标记为待返工部位;
17、获取待返工部位在三轴上的误差坐标,根据多个误差坐标建立误差坐标合集用做返工指示。
18、优选的,待返工部位的误差坐标合集包括:待返工部位对应x轴上最大值和最小值、待返工部位对应y轴上最大值和最小值和待返工部位对应z轴上最大值和最小值。
19、优选的,待返工部位的三轴上对应误差坐标不满足整数时,最小值左移至最近整数值,最大值右移至最近整数值。
20、优选的,根据误差坐标合集确认返工位置并采集返工数据,导入返工数据至bim软件建立返工模型的步骤包括:
21、与获取参考数据的方式相同获取返工数据,区别在于获取的返工数据部分仅包括误差坐标合集部分;
22、根据返工数据和bim软件建立返工模型,建立的返工模型至少为一个。
23、优选的,将返工模型和对应的子模型融合对比确认差异部位的步骤包括:
24、在对应的子模型中对在先差异部位进行标亮;
25、返工模型和对应的子模型中标亮的在先差异部位建立返工融合模型;
26、融合模型中,重合部分满足返工标准,重影部分说明存在差异标记为再次返工部位;
27、获取在此工部位在三轴上的误差坐标,根据多个误差坐标建立再次返工坐标合集用做再次返工指示。
28、本发明的上述技术方案具有如下有益的技术效果:导入施工图数据建立施工模型,按施工顺序将施工模型拆分为子模型,在对应的子模型中设置对应施工现场的采集基准点,并获取施工现场的参考数据,根据获取的参考数据建立参考模型,将参考模型和对应的子模型融合对比确认是否存在差异部位,存在差异部位时获取对应的误差坐标合集并进行返工,在数据采集过程中,快速完成施工现场的工程验收,且对不合施工要求的位置进行标记、返工和再次验收,从实际解决施工现场验收存在的验收效果差、待返工部位不明确的问题。
技术特征:
1.一种基于bim和物联网的智慧工地数据采集方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于bim和物联网的智慧工地数据采集方法,其特征在于,施工模型按施工顺序拆分为若干个子模型,其中施工顺序在后的子模型依托在前施工顺序的子模型渲染生成。
3.根据权利要求1所述的一种基于bim和物联网的智慧工地数据采集方法,其特征在于,采集基准点设置为子模型三维展示时x轴、y轴和z轴的起始点(x0,y0,z0),同时参考基准点对应施工现场的采集基准点,获取的参考数据应包括施工现场的全部坐标点位。
4.根据权利要求1所述的一种基于bim和物联网的智慧工地数据采集方法,其特征在于,获取参考数据时使用的采集装置包括:传感器、摄像头、gps定位器、支架和无人机,且采集装置配置物联网模块和存储模块,获取的参考数据通过物联网模块传输和存储模块存储。
5.根据权利要求1所述的一种基于bim和物联网的智慧工地数据采集方法,其特征在于,导入参考数据至bim软件建立参考模型,将参考模型和对应的子模型融合对比确认是否存在差异部位,不存在差异部位时按施工顺序继续施工,存在差异部位时获取对应的误差坐标合集的步骤包括:
6.根据权利要求5所述的一种基于bim和物联网的智慧工地数据采集方法,其特征在于,待返工部位的误差坐标合集包括:待返工部位对应x轴上最大值和最小值、待返工部位对应y轴上最大值和最小值和待返工部位对应z轴上最大值和最小值。
7.根据权利要求6所述的一种基于bim和物联网的智慧工地数据采集方法,其特征在于,待返工部位的三轴上对应误差坐标不满足整数时,最小值左移至最近整数值,最大值右移至最近整数值。
8.根据权利要求1所述的一种基于bim和物联网的智慧工地数据采集方法,其特征在于,根据误差坐标合集确认返工位置并采集返工数据,导入返工数据至bim软件建立返工模型的步骤包括:
9.根据权利要求1所述的一种基于bim和物联网的智慧工地数据采集方法,其特征在于,将返工模型和对应的子模型融合对比确认差异部位的步骤包括:
技术总结
本发明属于建筑施工领域,具体涉及一种基于BIM和物联网的智慧工地数据采集方法,包括以下步骤:导入施工图数据至BIM软件建立施工模型,按施工顺序将施工模型拆分为子模型;在对应的子模型中设置对应施工现场的采集基准点,并获取施工现场的参考数据,根据获取的参考数据建立参考模型,将参考模型和对应的子模型融合对比确认是否存在差异部位,存在差异部位时获取对应的误差坐标合集并进行返工,在数据采集过程中,快速完成施工现场的工程验收,且对不合施工要求的位置进行标记、返工和再次验收,从实际解决施工现场验收存在的验收效果差、待返工部位不明确的问题。
技术研发人员:胡君宁,王学斋,王锦枢
受保护的技术使用者:海南千章智能科技有限公司
技术研发日:
技术公布日:2024/5/27
- 还没有人留言评论。精彩留言会获得点赞!