一种提取口腔种植体模型轴线的方法与流程
本发明涉及到医学影像处理,具体涉及到一种提取口腔种植体模型轴线的方法。
背景技术:
1、导航式种牙手术通过建立医学图像空间与患者所处现实空间坐标系转换关系的方式,将医生术前在医学图像(患者cbct或者口扫数据)上制定的手术规划映射于现实手术空间,进而在术中引导医生将器械或植体以规划的方式置入患者口腔,以提高手术执行的准确性。
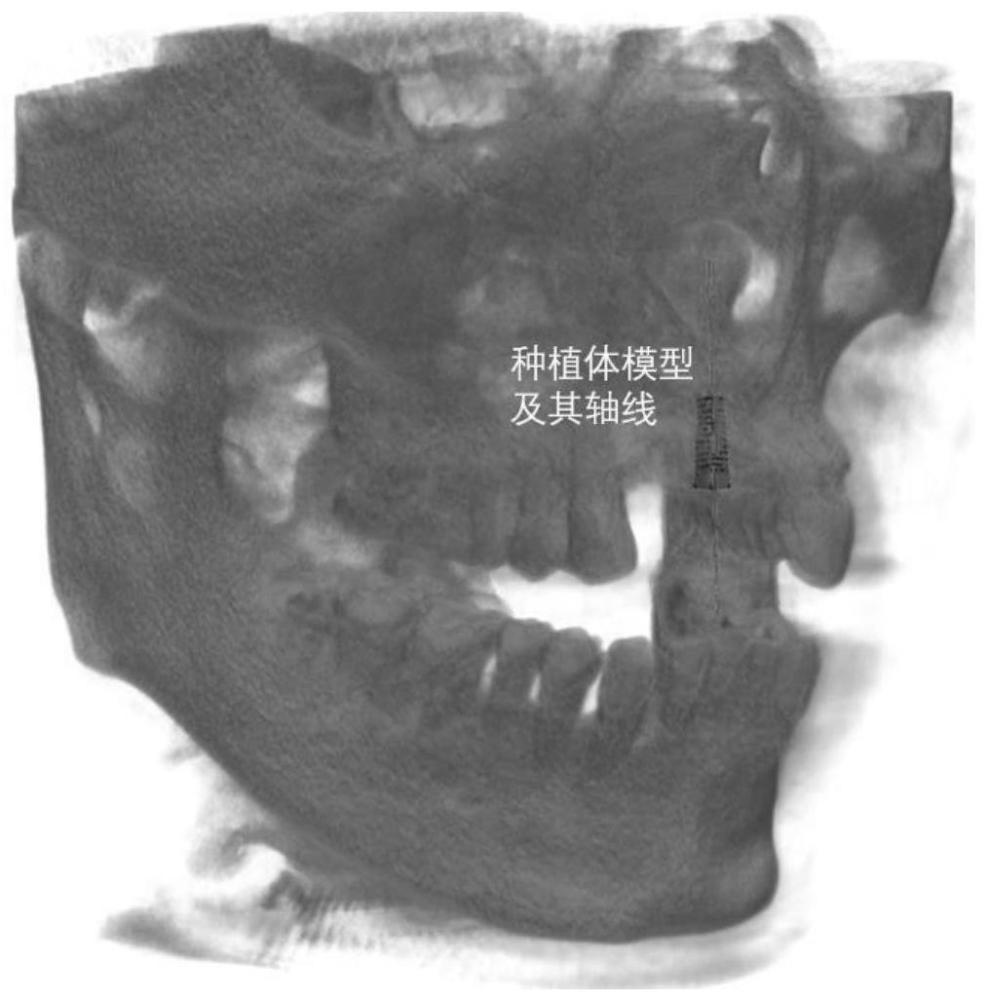
2、术前规划的重点在于确定患者术侧颌骨与种植体的相对位置关系,如图1所示,医生结合患者cbct呈现的生理状况,将种植体模型移动至图像空间中的合理位置。种植体模型的轴线决定了后续手术中钻针的钻孔方向,以及实际植体的置入角度。故准确提取手术规划中种植体模型的轴线位置十分重要。
3、对于形状规则,整体呈圆柱状且存在明显长轴的种植体模型,可以通过计算其有向包围盒(obb/oriented bounding box)的方式获取其轴线,但是对于图2所示的种植体,其大体积的深螺纹结构会严重干扰有向包围盒的建立,导致提取所得轴线并非种植体模型的实际轴线。
技术实现思路
1、本发明的目的是针对现有技术存在的问题,提供一种提取口腔种植体模型轴线的方法,适用于各种形状的种植体模型,具有较强的适应性和通用性。
2、为实现上述目的,本发明采用的技术方案是:
3、一种提取口腔种植体模型轴线的方法,包括以下步骤:
4、s1、生成空白三维影像数据,使用种植体模型作为模板填充空白三维影像数据,获得种植体三维影像数据;
5、s2、基于种植体三维影像数据,提取种植体模型内侧规则柱状部分的网格顶点集合;
6、s3、计算网格顶点集合的轴线,从而确定种植体模型的轴线。
7、进一步的,步骤s1中所述生成空白三维影像数据具体包括:
8、s1.1、遍历种植体模型的顶点,找出其在三个坐标轴上的最小和最大坐标值;
9、s1.2、由点(x_max,y_max,z_max)、(x_min,y_max,z_max)、(x_max,y_min,z_max)、(x_max,y_max,z_min)、(x_min,y_min,z_max)、(x_min,y_max,z_min)、(x_max,y_min,z_min)、(x_min,y_min,z_min)八个顶点构建的空间封闭图形即为种植体模型的轴对齐包围盒;
10、s1.3、设空白三维影像数据的体素尺寸为a,根据体素尺寸a和包围盒尺寸,计算影像在三个坐标轴上的维度数;
11、s1.4、使用vtkimagedata类初始化一个空白三维影像,设置其原点为(x_min,y_min,z_min),并设置所有体素灰度值为0。
12、进一步的,步骤s1中所述使用种植体模型作为模板填充空白三维影像数据具体包括:
13、s1.5、初始化vtkpolydatatoimagestencil对象,将种植体模型作为输入;
14、s1.6、创建vtkimagestencil过滤器,设置空白三维影像数据为输入,并设置implantstencil为模板工具;
15、s1.7、使用reversestencilon()方法设置过滤器为逆向模板提取模式,提取种植体模型内部的体素;
16、s1.8、使用setbackgroundvalue()方法设置模型外部体素的灰度值为1;
17、s1.9、执行vtkimagestencil过滤器,得到填充后的三维影像数据。
18、进一步的,步骤s2具体包括:
19、s2.1、获得种植体模型的几何重心点;
20、s2.2、遍历种植体模型上各网格顶点与点m的连接所构成的线段;
21、s2.3、在每个线段上均设置多个等距采样点;
22、s2.4、对于每个采样点,查询三维影像数据在该点的灰度值;
23、s2.5、如果线段上所有采样点的灰度值都为0,说明该线段不穿过模型,将该顶点纳入内侧网格顶点集合。
24、进一步的,步骤s2.1具体包括:
25、调用vtkcenterofmass过滤器,将种植体模型作为输入;
26、执行过滤器,得到模型的几何重心点m的坐标。
27、进一步的,步骤s3具体包括:
28、s3.1、遍历内侧网格顶点集合,计算所有顶点的坐标均值,得到的结果即为内侧网格顶点集合的几何中心c的坐标;
29、s3.2、使用主成分分析法(pca)计算网格顶点集合的方差最大的主方向,即轴线方向a;
30、s3.3、基于几何中心c与主方向,确定种植体模型轴线。
31、进一步的,步骤s3.2具体包括:
32、s3.2.1、提取内侧网格顶点集合的坐标值,构建一个n行3列的矩阵,其中每一行代表一个顶点的x、y、z坐标;
33、s3.2.2、对矩阵进行pca分析,得到主成分的方向向量;
34、s3.2.3、主成分的方向向量中,方差最大的即为所求的轴线方向a。
35、一种提取口腔种植体模型轴线的系统,包括:
36、三维影像数据生成模块,用于生成空白三维影像数据,使用种植体模型作为模板填充空白三维影像数据;
37、内侧网格顶点集合提取模块,用于基于种植体三维影像数据,提取种植体模型内侧规则柱状部分的网格顶点集合;
38、轴线计算模块,用于计算网格顶点集合的轴线,从而确定种植体模型的轴线。
39、一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行上述的方法。
40、一种存储介质,所述存储介质上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现上述的方法。
41、与现有技术相比,本发明的有益效果是:
42、利用种植体模型内侧规则柱状结构,基于顶点集合的几何特性和统计分布来确定轴线,能够避免种植体模型外部构型,如螺纹体积较大、种植体总体长度小于种植体直径等的影响,因此,本申请适用于各种形状的种植体模型,具有较强的适应性和通用性。
技术特征:
1.一种提取口腔种植体模型轴线的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种提取口腔种植体模型轴线的方法,其特征在于,步骤s1中所述生成空白三维影像数据具体包括:
3.根据权利要求1所述的一种提取口腔种植体模型轴线的方法,其特征在于,步骤s1中所述使用种植体模型作为模板填充空白三维影像数据具体包括:
4.根据权利要求1所述的一种提取口腔种植体模型轴线的方法,其特征在于,步骤s2具体包括:
5.根据权利要求4所述的一种提取口腔种植体模型轴线的方法,其特征在于,步骤s2.1具体包括:
6.根据权利要求1所述的一种提取口腔种植体模型轴线的方法,其特征在于,步骤s3具体包括:
7.根据权利要求6所述的一种提取口腔种植体模型轴线的方法,其特征在于,步骤s3.2具体包括:
8.一种提取口腔种植体模型轴线的系统,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行权利要求1至7中任意一项所述的方法。
10.一种存储介质,其特征在于,所述存储介质上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现权利要求1至7中任意一项所述的方法。
技术总结
本发明公开一种提取口腔种植体模型轴线的方法,包括以下步骤:S1、生成空白三维影像数据,使用种植体模型作为模板填充空白三维影像数据;S2、基于种植体三维影像数据,提取种植体模型内侧规则柱状部分的网格顶点集合;S3、计算网格顶点集合的轴线,从而确定种植体模型的轴线;本发明利用种植体模型内侧规则柱状结构,基于顶点集合的几何特性和统计分布来确定轴线,能够避免种植体模型外部构型,因此,本申请适用于各种形状的种植体模型,具有较强的适应性和通用性。
技术研发人员:周再望,黄志俊,刘金勇,钱坤
受保护的技术使用者:杭州柳叶刀机器人有限公司
技术研发日:
技术公布日:2024/6/2
- 还没有人留言评论。精彩留言会获得点赞!