一种基于卡尔曼滤波器的鱼类追踪方法
本发明涉及计算机视觉,具体涉及一种基于卡尔曼滤波器的鱼类追踪方法。
背景技术:
1、在水下生态学和水产养殖管理等领域,鱼类的追踪对于准确了解水下环境、判断鱼类行为和管理水产资源至关重要。在多目标跟踪领域,特别是在水下环境中,受鱼群的不规则运动的影响,目标遮挡问题一直是一个具有挑战性的难题。
2、传统的跟踪算法在遇到目标被遮挡的情况下往往表现不佳。因此,有必要提出一种新颖的、能够有效应对遮挡情况的跟踪算法,以解决传统方法在遮挡情况下的局限性,提高鱼类追踪的准确性和稳定性。
技术实现思路
1、本发明的目的在于提供一种基于卡尔曼滤波器的鱼类追踪方法,该方法提升了跟踪算法在鱼类目标被遮挡情况下的性能,可为水下环境监测和生态研究提供更为可靠的技术支持。
2、为实现上述目的,本发明采用以下技术方案:
3、一种基于卡尔曼滤波器的鱼类追踪方法,包括以下步骤:
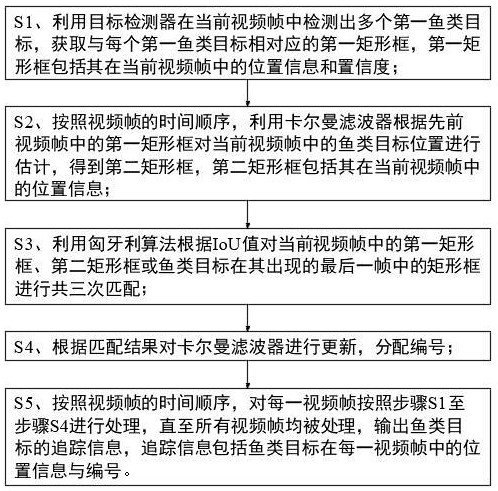
4、s1、利用目标检测器在当前视频帧中检测出多个第一鱼类目标,获取与每个第一鱼类目标相对应的第一矩形框,第一矩形框包括其在当前视频帧中的位置信息和置信度;
5、s2、按照视频帧的时间顺序,利用卡尔曼滤波器根据先前视频帧中的第一矩形框对当前视频帧中的鱼类目标位置进行估计,得到第二矩形框,第二矩形框包括其在当前视频帧中的位置信息;
6、s3、利用匈牙利算法根据iou值对当前视频帧中的第一矩形框、第二矩形框或鱼类目标在其出现的最后一帧中的矩形框进行共三次匹配;
7、s4、根据匹配结果对卡尔曼滤波器进行更新,分配编号;
8、s5、按照视频帧的时间顺序,对每一视频帧按照步骤s1至步骤s4进行处理,直至所有视频帧均被处理,输出鱼类目标的追踪信息,追踪信息包括鱼类目标在每一视频帧中的位置信息与编号。
9、优选地,步骤s3中所述iou值为两个矩形框覆盖范围的交集的像素个数和两个矩形框覆盖范围的并集的像素个数的比值,计算公式为:其中,a和b均为矩形框。
10、优选地,步骤s3的具体过程为:
11、s31、根据第一矩形框的置信度将其分为高分第一矩形框与低分第一矩形框;
12、s32、根据iou值使用匈牙利算法对高分第一矩形框与第二矩形框进行匹配,匹配失败的第二矩形框为第三矩形框,匹配失败的高分第一矩形框为第四矩形框,匹配成功的高分第一矩形框为第五矩形框;
13、s33、根据iou值使用匈牙利算法对第三矩形框与低分第一矩形框进行匹配,匹配成功的低分第一矩形框为第六矩形框,匹配失败的第三矩形框为第七矩形框;
14、s34、获取第七矩形框对应鱼类目标所出现的最后一帧的矩形框作为第八矩形框;
15、s35、根据iou值使用匈牙利算法对第四矩形框和第八矩形框进行匹配,匹配失败的第四矩形框为第九矩形框,匹配成功的第八矩形框为第十矩形框,匹配失败的第八矩形框为第十一矩形框。
16、优选地,步骤s4的具体过程为:
17、s41、使用第五矩形框、第六矩形框和第十矩形框对其对应的卡尔曼滤波器进行更新;
18、s42、使用第九矩形框初始化新的卡尔曼滤波器,并为第九矩形框对应目标分配编号。
19、采用上述技术方案后,本发明具有如下有益效果:本发明提供的基于卡尔曼滤波器的鱼类追踪方法,该方法通过卡尔曼滤波器充分融合鱼类目标运动的时空信息,在保证对视频进行实时处理的前提下,可应对水下图像背景复杂、昼夜光照条件差异大、鱼类目标尺度多变等困难,在多个鱼类目标重叠时可有效减少目标编号切换的次数,且在目标被其他目标或背景物体遮挡时仍能对其进行有效追踪,可为水下环境监测和生态研究提供更为可靠的技术支持。
技术特征:
1.一种基于卡尔曼滤波器的鱼类追踪方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种基于卡尔曼滤波器的鱼类追踪方法,其特征在于:步骤s3中所述iou值为两个矩形框覆盖范围的交集的像素个数和两个矩形框覆盖范围的并集的像素个数的比值,计算公式为:其中,a和b均为矩形框。
3.如权利要求1所述的一种基于卡尔曼滤波器的鱼类追踪方法,其特征在于,步骤s3的具体过程为:
4.如权利要求3所述的一种基于卡尔曼滤波器的鱼类追踪方法,其特征在于,步骤s4的具体过程为:
技术总结
本发明公开了一种基于卡尔曼滤波器的鱼类追踪方法,包括以下步骤:S1、利用目标检测器在当前视频帧中检测出多个第一鱼类目标,获取与每个第一鱼类目标相对应的第一矩形框;S2、按照视频帧的时间顺序,利用卡尔曼滤波器根据先前视频帧中的第一矩形框对当前视频帧中的鱼类目标位置进行估计,得到第二矩形框;S3、利用匈牙利算法根据IoU值对当前视频帧中的第一矩形框、第二矩形框或鱼类目标在其出现的最后一帧中的矩形框进行共三次匹配;S4、根据匹配结果对卡尔曼滤波器进行更新,分配编号;S5、对每一视频帧按照步骤S1至步骤S4进行处理,直至所有视频帧均被处理,输出鱼类目标的追踪信息,追踪信息包括鱼类目标在每一视频帧中的位置信息与编号。
技术研发人员:陈能汪,许顺安,陈纪新
受保护的技术使用者:厦门大学
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!