一种基于图神经网络的道路网数据匹配方法
本发明涉及路网匹配,尤其涉及一种基于图神经网络的道路网数据匹配方法。
背景技术:
1、道路网作为一种重要的交通基础设施,路网数据的及时更新对交通管理、应急救援和城市规划等领域有重要应用意义。通过路网匹配来确定不同来源的路网数据中要素间的对应关系,既是实现路网更新的重要技术途径,也为众源路网数据质量评估等任务提供技术支撑,因而备受地理信息领域学者的关注。传统的路网匹配方法主要通过路网数据的几何和拓扑属性来度量路网结构的相似性,以此确定路网要素的匹配关系。但人工设计的特征和阈值易受专家经验局限,使其在复杂路网结构下性能下降。近年来,基于图神经网络的路网数据建模成为研究热点,已在多个路网建模任务中取得优异性能。但现有方法多采用在图拓扑结构上直接进行邻域聚合的方式,学习路网结构的嵌入表示,未在这一关键步骤中考虑路网要素的空间关系,没能充分利用图神经网络的表示学习能力。
技术实现思路
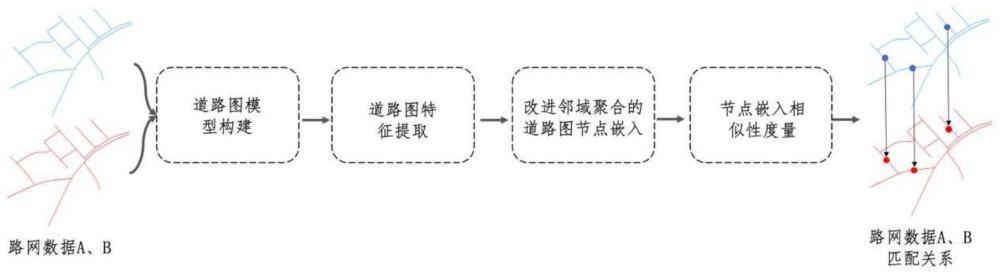
1、本发明面向路网匹配任务,采用空间显式建模的思想,提出一种基于图神经网络的道路网数据匹配方法,首先,构建路网数据的道路图模型并提取几何、语义和位置特征;然后,基于graphsage框架,提出空间、属性和混合三种邻域聚合算子,在邻域聚合操作中引入路网要素空间关系、属性类型的计算;最后,利用图节点嵌入的相似度确定路网要素的匹配关系。为验证本发明方法的有效性,利用真实路网数据开展了充分实验,本发明方法在实验区数据上的各项指标取得最优表现,比基线图神经网络方法的匹配正确率提升11%以上、召回率提升6.8%以上。
2、为了实现上述目的,本发明采用以下技术方案:
3、一种基于图神经网络的道路网数据匹配方法,包括:
4、步骤1:对路网数据进行预处理及stroke提取,利用路网数据构建描述路段关系的图模型,用图的节点表示stroke路段,图的边表示相邻路段的连接关系;
5、步骤2:对路段的几何要素进行自动编码作为路段的几何特征,采用路段的属性数据作为路段的语义特征,并使用路段的坐标和方位角度作为路段位置特征,综合几何、语义、位置三类特征作为道路图节点的初始特征描述;
6、步骤3:基于graphsage框架,以道路图节点的初始特征作为输入,利用空间邻域聚合函数、属性邻域聚合函数或混合邻域聚合函数学习路段的图节点嵌入;
7、步骤4:对不同来源的路网数据,分别学习路网数据的图节点嵌入,并利用图节点嵌入计算不同数据源之间的路段相似度,确定路段匹配关系,实现路网匹配。
8、进一步地,所述步骤1包括:
9、首先,对路网数据进行预处理,滤除路网数据中的噪声数据,并对路网数据进行stroke提取操作;
10、然后,基于处理的路网数据确定图的节点和边,构建道路图,选取stroke路段的中点作为道路图节点,根据路段间的距离关系确定每个节点的邻域节点,连接相邻节点来构建图的边。
11、进一步地,按照以下方式确定每个节点的邻域节点:
12、设置一个邻域搜索半径,然后对每个路段节点搜索邻域中豪斯多夫距离高于一定阈值的路段节点。
13、进一步地,所述步骤2中,在提取路段的几何特征时,遍历路网数据的每条路段,比较路段端点的经纬度,取经度或纬度较小者作为路段起点。
14、进一步地,所述路段的语义特征包括道路类型和道路名称。
15、进一步地,所述路段的坐标表示为路网瓦片地理范围内归一化的起始点坐标,路段的方位角度通过起始点位置到路网瓦片边界的夹角来确定。
16、进一步地,所述空间邻域聚合函数为:
17、
18、其中是空间聚合情况下节点v第k层的嵌入向量,pu和pv分别是节点u和v表示的路段中点的坐标;pu-pv表示节点间的空间关系,由节点位置欧式距离计算得到;w(k)是可学习参数;n(v)是节点v的邻居节点集合;|n(v)|是节点v的邻居节点个数;σ是激活函数。
19、进一步地,所述属性邻域聚合函数为:
20、
21、其中是属性聚合情况下节点v第k层的嵌入向量,是与节点v具有相同道路类型的邻居节点u的第k-1层的嵌入向量;w(k)是可以被训练的参数;n(v)是节点v的邻居节点集合;|n(v)|是节点v的邻居节点个数;σ是激活函数。
22、进一步地,所述混合邻域聚合函数为:
23、
24、其中是混合聚合情况下节点v第k层的嵌入向量,pu和pv分别是节点u和v表示的路段中点的坐标;pu-pv表示节点间的空间关系,由节点位置欧式距离计算得到;w(k)是可学习参数;n(v)是节点v的邻居节点集合;|n(v)|是节点v的邻居节点个数;σ是激活函数。
25、进一步地,所述步骤4包括:
26、对参与路网匹配的路网数据,分别构建各自的道路图并提取特征,然后进行道路图节点嵌入学习;
27、计算不同来源路网数据的路段相似性,通过比较路段相似性大小来寻找匹配路段,包括:首先,使用临近加权曼哈顿距离计算不同来源路网数据的节点嵌入高维向量的距离dve,然后,利用节点的连接距离d计算节点权重系数w,并对w进行归一化,得到w′,进而得到节点对应路段的相似性得分score:
28、w=d/d(1/d)
29、score=(1/(1+dve))w′
30、其中d为道路之间的豪斯多夫距离。
31、与现有技术相比,本发明具有的有益效果:
32、本发明采用空间显式建模思想,设计了新的图神经网络邻域聚合函数,在路网嵌入学习中引入空间关系运算,增强图嵌入对路网数据的学习表示,提升图神经网络在路网匹配上的应用水平,并利用真实路网数据测试验证了本发明方法的有效性:
33、(1)本发明提出一种基于图神经网络的道路网数据匹配方法,通过构建道路图并学习图节点嵌入,实现基于图节点嵌入的路网匹配。设计了空间、属性和混合三种邻域聚合函数,提升了图神经网络对路网空间结构的表示能力。
34、(2)利用真实路网数据开展了路网匹配实验,对比研究了经典路网匹配算法、多个图神经网络路网匹配算法的性能,实验验证了本发明方法的有效性。相比基线图神经网络方法,本发明方法在实验区数据上的匹配正确率提升11%以上,召回率提升6.8%以上。
技术特征:
1.一种基于图神经网络的道路网数据匹配方法,其特征在于,包括:
2.根据权利要求1所述的一种基于图神经网络的道路网数据匹配方法,其特征在于,所述步骤1包括:
3.根据权利要求2所述的一种基于图神经网络的道路网数据匹配方法,其特征在于,按照以下方式确定每个节点的邻域节点:
4.根据权利要求1所述的一种基于图神经网络的道路网数据匹配方法,其特征在于,所述步骤2中,在提取路段的几何特征时,遍历路网数据的每条路段,比较路段端点的经纬度,取经度或纬度较小者作为路段起点。
5.根据权利要求1所述的一种基于图神经网络的道路网数据匹配方法,其特征在于,所述路段的语义特征包括道路类型和道路名称。
6.根据权利要求1所述的一种基于图神经网络的道路网数据匹配方法,其特征在于,所述路段的坐标表示为路网瓦片地理范围内归一化的起始点坐标,路段的方位角度通过起始点位置到路网瓦片边界的夹角来确定。
7.根据权利要求1所述的一种基于图神经网络的道路网数据匹配方法,其特征在于,所述空间邻域聚合函数为:
8.根据权利要求1所述的一种基于图神经网络的道路网数据匹配方法,其特征在于,所述属性邻域聚合函数为:
9.根据权利要求1所述的一种基于图神经网络的道路网数据匹配方法,其特征在于,所述混合邻域聚合函数为:
10.根据权利要求1所述的一种基于图神经网络的道路网数据匹配方法,其特征在于,所述步骤4包括:
技术总结
本发明公开一种基于图神经网络的道路网数据匹配方法,包括:对路网数据进行预处理及stroke提取,利用路网数据构建描述路段关系的图模型,用图的节点表示stroke路段,图的边表示相邻路段连接关系;对路段的几何要素进行自动编码作为路段几何特征,采用路段的属性数据作为路段的语义特征,并使用路段的坐标和方位角度作为路段位置特征;基于GraphSAGE框架,以道路图节点的初始特征作为输入,利用空间、属性或混合邻域聚合函数学习路段的图节点嵌入;分别学习不同来源路网数据的图节点嵌入,并利用图节点嵌入计算不同数据源之间的路段相似度,确定路段匹配关系,实现路网匹配。本发明提升了基于图神经网络进行路网匹配的性能。
技术研发人员:杨剑,方立,杨铭,李科,贾奋励,宋国民
受保护的技术使用者:中国人民解放军战略支援部队信息工程大学
技术研发日:
技术公布日:2024/7/11
- 还没有人留言评论。精彩留言会获得点赞!