一种基于有限元仿真结果学习的路面纹理接触分布对抗生成方法、电子设备及存储介质
本发明涉及道路工程领域,尤其是涉及一种基于有限元仿真结果学习的路面纹理接触分布对抗生成方法、电子设备及存储介质。
背景技术:
1、路面纹理可以反映诸多路面表观构造特性,如构造深度、孔隙率、抗滑性能等。其中,抗滑性能是是道路行车安全的重要保障。基于路面纹理数据的抗滑性能研究目前主要是通过提取路面纹理特征进行回归预测,然而,单纯靠特征指标难以有效提取路面纹理复杂特征。部分研究采用神经网络对路面纹理数据进行预测,研究表明,选取路面纹理有效接触部分作为输入可以提升模型的预估准确率。因此,掌握路面纹理接触分布对研究路面抗滑性能有着重要的意义。由于实际的胎路接触实验的结果只适用于特定的轮胎和特定的路面纹理,研究的普适性不强,因此,现有研究大部分采用有限元仿真的方法来计算路面纹理接触分布。
2、现有技术中,公开号为cn 115774950 a的中国专利公开了一种基于路表纹理的轮胎路面声学有限元分析方法,该方法利用二维的投影恢复物体三维形状的数学过程和计算机技术来进行重构,但其识别路面表面形貌特征的准确度并不高。此外,现有的有限元仿真模型的建模过程复杂,计算时间长,难以满足大批数据的结果计算。因此,本发明采用对抗生成网络学习有限元仿真结果,从而实现快速的轮胎-橡胶仿真结果的生成,为路面抗滑性能评估、胎路接触行为分析以及路面材料设计等提供技术支持。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于有限元仿真结果学习的路面纹理接触分布对抗生成方法、电子设备及存储介质。
2、本发明的目的可以通过以下技术方案来实现:
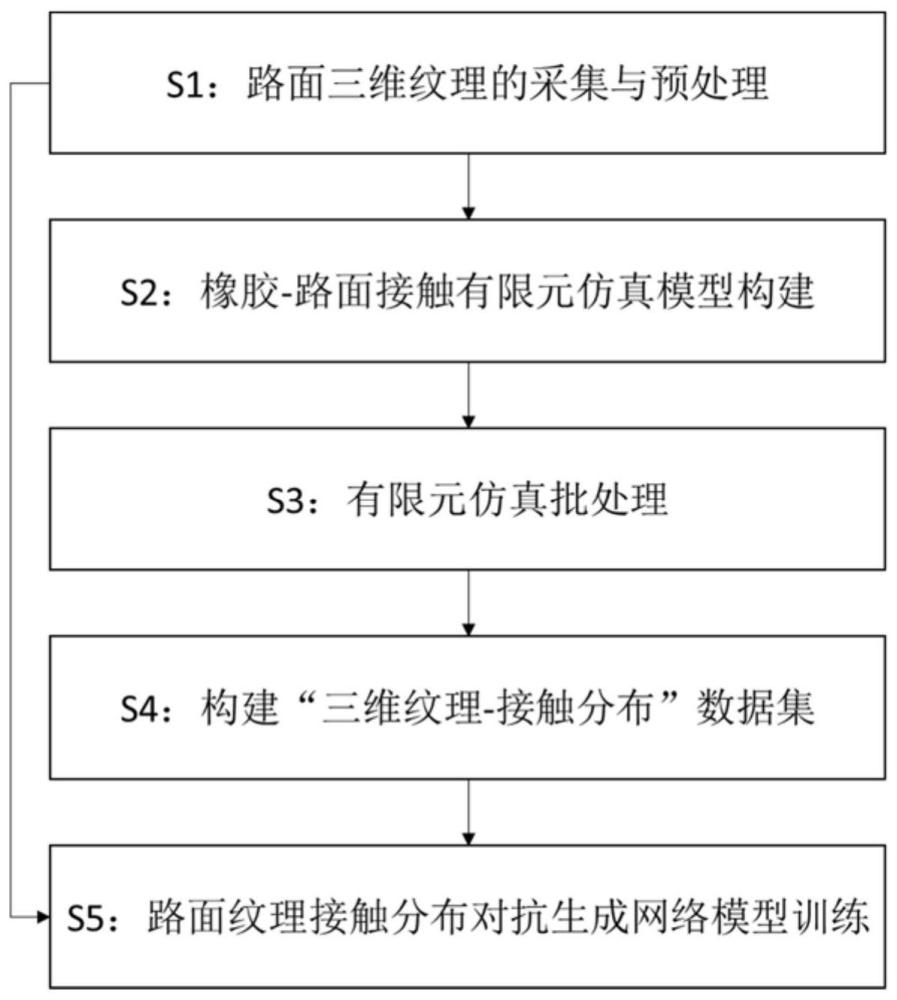
3、本发明提供一种基于有限元仿真结果学习的路面纹理接触分布对抗生成方法,包括以下步骤:
4、步骤s1,通过三维激光扫描设备采集,并进行预处理,得到路面三维纹理数据;
5、步骤s2,构建橡胶-路面接触有限元仿真模型;
6、步骤s3,对所述橡胶-路面接触有限元仿真模型进行批处理得到橡胶-路面接触分布结果;
7、步骤s4,将所述路面三维纹理数据与对应的所述橡胶-路面接触分布结果数据组成数据对,构建三维纹理-接触分布数据集;
8、步骤s5,构建并训练路面纹理接触分布对抗生成网络模型,将所述路面三维数据测试数据输入训练好的路面纹理接触分布对抗生成网络模型中,得到预测的橡胶-路面接触分布结果。
9、所述预处理包括网格化、插值、滤波降噪操作。
10、所述步骤s2具体包括部件生成、装配、属性定义、分析步设置、相互作用、边界条件、网格划分、作业设置、结果导出与处理。
11、所述部件生成包括三维路面实体和橡胶部件。
12、所述分析步设置包括两个静态通用分析步:包括在第一个分析步中,橡胶块竖直向下移动,使得路面和橡胶部分发生接触;在第二个分析步中,解除橡胶竖向的限制,橡胶可以发生竖向的位移,在所述两个静态通用分析步中,在橡胶上表面均施加均匀分布的竖向压强。
13、所述静态通用分析步中包括多个增量步,对增量步设置参数。
14、所述步骤s5中,训练路面纹理接触分布对抗生成网络模型包括:将所述路面三维纹理数据作为输入,将所述橡胶-路面接触分布结果作为训练标签,对路面纹理接触分布对抗生成网络模型进行训练。
15、优先地,采用keras框架进行训练,优化器采用adam。
16、第二方面,本发明提供一种电子设备,包括存储器、处理器,以及存储于所述存储器中的程序,所述处理器执行所述程序时实现上述任一所述方法中的步骤。
17、第三方面,本发明一种存储介质,其上存储有程序,所述程序被执行时实现上述任一所述方法中的步骤。
18、与现有技术相比,本发明具有以下有益效果:
19、1、本发明通过构建并训练路面纹理接触分布对抗生成网络模型,具有实现快速的轮胎-橡胶仿真结果的生成的效果,避免了繁琐而复杂的有限元模型构建和仿真计算的过程。
20、2、本发明可以基于路面三维纹理数据,预测橡胶-路面接触分布,为路面抗滑性能评估、胎路接触行为分析以及路面材料设计等提供技术支持。
技术特征:
1.一种基于有限元仿真结果学习的路面纹理接触分布对抗生成方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于有限元仿真结果学习的路面纹理接触分布对抗生成方法,其特征在于,所述预处理包括网格化、插值、滤波降噪操作。
3.根据权利要求1所述的一种基于有限元仿真结果学习的路面纹理接触分布对抗生成方法,其特征在于,所述步骤s2具体包括部件生成、装配、属性定义、分析步设置、相互作用、边界条件、网格划分、作业设置、结果导出与处理。
4.根据权利要求3所述的一种基于有限元仿真结果学习的路面纹理接触分布对抗生成方法,其特征在于,所述部件生成包括三维路面实体和橡胶部件。
5.根据权利要求3所述的一种基于有限元仿真结果学习的路面纹理接触分布对抗生成方法,其特征在于,所述分析步设置包括两个静态通用分析步:包括在第一个分析步中,橡胶块竖直向下移动,使得路面和橡胶部分发生接触;在第二个分析步中,解除橡胶竖向的限制,橡胶可以发生竖向的位移,在所述两个静态通用分析步中,在橡胶上表面均施加均匀分布的竖向压强。
6.根据权利要求5所述的一种基于有限元仿真结果学习的路面纹理接触分布对抗生成方法,其特征在于,所述静态通用分析步中包括多个增量步,对增量步设置参数。
7.根据权利要求1所述的一种基于有限元仿真结果学习的路面纹理接触分布对抗生成方法,其特征在于,所述步骤s5中,训练路面纹理接触分布对抗生成网络模型包括:将所述路面三维纹理数据作为输入,将所述橡胶-路面接触分布结果作为训练标签,对路面纹理接触分布对抗生成网络模型进行训练。
8.根据权利要求7所述的一种基于有限元仿真结果学习的路面纹理接触分布对抗生成方法,其特征在于,采用keras框架进行训练,优化器采用adam。
9.一种电子设备,包括存储器、处理器,以及存储于所述存储器中的程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-8中任一所述方法中的步骤。
10.一种存储介质,其上存储有程序,其特征在于,所述程序被执行时实现如权利要求1-8中任一所述方法中的步骤。
技术总结
本发明涉及道路工程领域,尤其是涉及一种基于有限元仿真结果学习的路面纹理接触分布对抗生成方法,包括以下步骤:通过三维激光扫描设备采集,并进行预处理,得到路面三维纹理数据;构建橡胶‑路面接触有限元仿真模型;对所述橡胶‑路面接触有限元仿真模型进行批处理得到橡胶‑路面接触分布结果;将所述路面三维纹理数据与对应的所述橡胶‑路面接触分布结果数据组成数据对,构建三维纹理‑接触分布数据集;构建并训练路面纹理接触分布对抗生成网络模型,将所述路面三维数据测试数据输入训练好的路面纹理接触分布对抗生成网络模型中,得到预测的橡胶‑路面接触分布结果。与现有技术相比,本发明具有实现快速的轮胎‑橡胶仿真结果的生成,为路面抗滑性能评估、胎路接触行为分析提供技术支撑等优点。
技术研发人员:刘成龙,翁梓航,杜豫川,吴荻非,李亦舜,王书玲
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/7/11
- 还没有人留言评论。精彩留言会获得点赞!