一种镜面反射条件下机器视觉拍照识别方法及其装置与流程
[]本发明涉及机器视觉识别,具体地说是一种镜面反射条件下机器视觉拍照识别方法及其装置。
背景技术:
0、[背景技术]
1、在工业现场中,存在着各种各样的仪表设备,如压力表、温度表、指针表等。随着机器视觉和物联网技术的发展,越来越多的用户开始选择使用相机定时拍照,然后通过机器视觉算法自动识别的方式来获取设备的数据。该方法对于一些老旧的仪表来说具有一定的便捷性。但是在拍摄过程中会遇到一些屏幕尤其是液晶屏在打光的过程中会产生镜面反射,一般的led光源所产生的照明排列在视野一侧会呈现出明显的不均匀性,打光效果极差,且会在仪表表面产生明显的光斑覆盖指针或者数字,使得算法无法对照片进行识别。
2、因此,需要采用特殊的设计以保证照明均有性。
技术实现思路
0、[
技术实现要素:
]
1、本发明的目的就是要解决上述的不足而提供一种镜面反射条件下机器视觉拍照识别方法,能够实现在led偏置配置的情况下,视野范围内的均匀照明,且可以消除多光源打光装置拍摄得到的照片中的光斑,以得到均匀打光下包含目标物体的完整信息的照片。
2、为实现上述目的设计一种镜面反射条件下机器视觉拍照识别方法,首先设计偏置照明装置,偏置照明装置步设有三个非球面透镜,非球面透镜为非轴对称的透镜,其折射面为非球面曲面,三个非球面透镜对led光束进行折射后,在视野范围内均匀照明;然后分别点亮不同led灯,通过多次拍摄进行合成方式以及光斑消除算法,进而实现消除反射光。
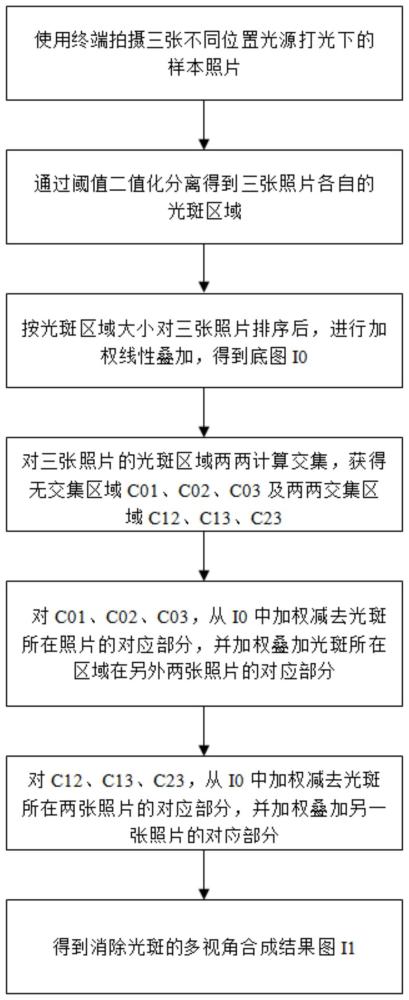
3、进一步地,所述光斑消除算法包括以下步骤:
4、1)在同一场景下,拍摄三张不同位置光源打光下的样本照片;
5、2)对三张照片分别进行二值化处理,分离得到其各自的光斑区域;
6、3)按照光斑区域的大小,对三张样本照片进行排序;
7、4)按排序结果,对三张照片进行加权线性叠加,得到底图;
8、5)对三张照片的光斑区域,两两计算交集,得到无交集的区域,及两两交集区域;
9、6)对无交集区域,从底图中加权减去其对应的光斑照片中的相应部分,再加权叠加另外两张照片中的相应部分;
10、7)对两两交集区域,从底图中加权减去其对应的两张光斑照片中的相应部分,再加权叠加另一张照片中的相应部分;
11、8)通过以上两个步骤,从底图中进一步消除光斑的影响,最终得到消除光斑的多视角合成结果图。
12、进一步地,在拍摄过程中,将三个led灯轮番点亮进行拍摄,led一灯点亮摄像头进行拍照生成照片一,照片一中光斑一的位置在图片中心偏下方,led二灯点亮摄像头进行拍照生成照片二,照片二中光斑二的位置在图片中心偏左方,led三灯点亮摄像头进行拍照生成照片三,照片三中光斑三的位置在图片中心偏下方。
13、进一步地,所述非球面透镜的非球面方程为:
14、
15、其中,r=25.54,k=-1.31。
16、本发明还提供了一种镜面反射条件下机器视觉拍照识别方法中的偏置照明装置,包括呈三角形分布的led发光面1,所述led发光面1偏置于需要照明的视野范围2的一侧,所述led发光面1的外表面采用平面设计,所述led发光面1的内表面靠近led照明上方设有非球面透镜3,所述非球面透镜3为非轴对称的透镜,所述非球面透镜3的折射面4为非球面曲面,三个非球面曲面对led光束进行偏转折射后在视野范围2内均匀照明。
17、进一步地,所述非轴对称透镜为一体成型非轴对称透镜,且由光学pc材料注塑成型。
18、进一步地,所述led发光面1设于外壳5内部的pc塑料底板上,并与pc塑料底板一体注塑成型。
19、进一步地,所述外壳5内部位于非球面透镜3处设置有图像传感器支架6,所述图像传感器支架6用于安装图像传感器。
20、进一步地,所述外壳5一侧的外表面设置有安装卡扣7,所述安装卡扣7左右对称布置有两个,所述安装卡扣7用于将外壳5安装到需要照明的位置。
21、本发明同现有技术相比,通过从照明和图像处理算法两个方面进行设计,首先设计多个照明单元,通过布设非球面透镜的方式,调整led均匀分布到整个视野,然后通过分别点亮不同照明单元,利用不同led单个点亮时,高光并不会同时出现的原理,通过多次拍摄进行合成的方式,来实现消除反射光的目的,即达到偏置照明条件下消除反射光的目的。本发明可以在led由于场景限制,只能布置在一侧,通过特殊的光学设计,实现了在led偏置配置的情况下,视野范围内的均匀照明,且可以通过光斑消除算法进行光斑消除,使得本产品适用的场景更多,且所拍摄的照片质量得到保证。综上,本发明能够消除多光源打光装置拍摄得到的照片中的光斑,以得到均匀打光下包含目标物体的完整信息的照片,值得推广应用。
技术特征:
1.一种镜面反射条件下机器视觉拍照识别方法,其特征在于:首先设计偏置照明装置,偏置照明装置步设有三个非球面透镜,非球面透镜为非轴对称的透镜,其折射面为非球面曲面,三个非球面透镜对led光束进行折射后,在视野范围内均匀照明;然后分别点亮不同led灯,通过多次拍摄进行合成方式以及光斑消除算法,进而实现消除反射光。
2.如权利要求1所述的方法,其特征在于,所述光斑消除算法包括以下步骤:
3.如权利要求1所述的方法,其特征在于:在拍摄过程中,将三个led灯轮番点亮进行拍摄,led一灯点亮摄像头进行拍照生成照片一,照片一中光斑一的位置在图片中心偏下方,led二灯点亮摄像头进行拍照生成照片二,照片二中光斑二的位置在图片中心偏左方,led三灯点亮摄像头进行拍照生成照片三,照片三中光斑三的位置在图片中心偏下方。
4.如权利要求1所述的方法,其特征在于,所述非球面透镜的非球面方程为:
5.一种如权利要求1至4中任一项所述的镜面反射条件下机器视觉拍照识别方法中的偏置照明装置,其特征在于:包括呈三角形分布的led发光面(1),所述led发光面(1)偏置于需要照明的视野范围(2)的一侧,所述led发光面(1)的外表面采用平面设计,所述led发光面(1)的内表面靠近led照明上方设有非球面透镜(3),所述非球面透镜(3)为非轴对称的透镜,所述非球面透镜(3)的折射面(4)为非球面曲面,三个非球面曲面对led光束进行偏转折射后在视野范围(2)内均匀照明。
6.如权利要求5所述的装置,其特征在于:所述非轴对称透镜为一体成型非轴对称透镜,且由光学pc材料注塑成型。
7.如权利要求5所述的装置,其特征在于:所述led发光面(1)设于外壳(5)内部的pc塑料底板上,并与pc塑料底板一体注塑成型。
8.如权利要求5所述的装置,其特征在于:所述外壳(5)内部位于非球面透镜(3)处设置有图像传感器支架(6),所述图像传感器支架(6)用于安装图像传感器。
9.如权利要求5所述的装置,其特征在于:所述外壳(5)一侧的外表面设置有安装卡扣(7),所述安装卡扣(7)左右对称布置有两个,所述安装卡扣(7)用于将外壳(5)安装到需要照明的位置。
技术总结
本发明涉及一种镜面反射条件下机器视觉拍照识别方法及其装置,为达到偏置照明条件下消除反射光的目的,本发明从照明和图像处理算法两个方面进行了创新设计,首先设计偏置照明装置,偏置照明装置步设有三个非球面透镜,非球面透镜为非轴对称的透镜,其折射面为非球面曲面,三个非球面透镜对LED光束进行折射后,在视野范围内均匀照明;然后分别点亮不同LED灯,通过多次拍摄进行合成方式以及光斑消除算法,进而实现消除反射光;本发明同现有技术相比,能够实现在LED偏置配置的情况下,视野范围内的均匀照明,且可以消除多光源打光装置拍摄得到的照片中的光斑,以得到均匀打光下包含目标物体的完整信息的照片。
技术研发人员:丁强,谭李诺,朱宏亮,丁磊鸣,柳军
受保护的技术使用者:上海智能制造功能平台有限公司
技术研发日:
技术公布日:2024/6/30
- 还没有人留言评论。精彩留言会获得点赞!