一种基于卷积神经网络的大视场高空间分辨率流场重构方法
本发明涉及桥梁风工程,特别是涉及一种基于卷积神经网络的大视场高空间分辨率流场重构方法。
背景技术:
1、粒子图像测速(piv)技术的空间分辨率与其视场范围之间存在着一种权衡关系。即增大视场范围以获取流场的大尺度信息往往会降低空间分辨率,而提高空间分辨率以更精确地捕捉局部流动特征则可能导致视野范围受限,无法完全覆盖整个流场区域。因此只能获取局部高分辨率的流场,或者为了获得更大的测量面积而牺牲精度。现有获取大视场高空间分辨率流场都是通过多台相机同步拍摄流场不同位置后进行拼接,然而高速相机价格昂贵,实验成本巨大。
技术实现思路
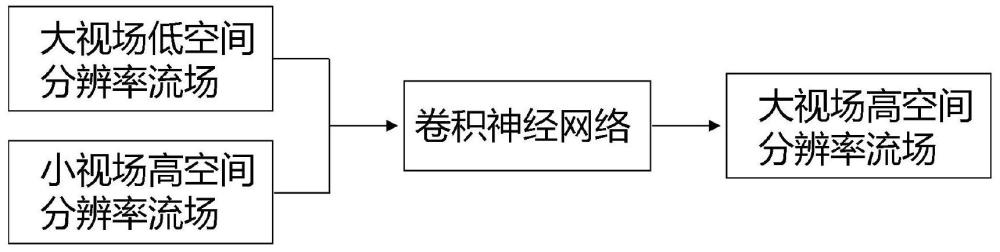
1、本发明针对现有技术中存在的不足,提出了一种基于卷积神经网络的大视场高空间分辨率流场重构方法。该方法利用大视场低空间分辨率piv测量结果和局部小视场高空间分辨率piv流场测量结果,来重构出整个流场的大视场高空间分辨率结果。
2、本发明是通过以下技术方案实现的:本发明提出一种基于卷积神经网络的大视场高空间分辨率流场重构方法,所述方法包括以下步骤:
3、步骤一,获得流场数据;采用粒子图像测速技术piv进行流场测量,同时使用两部高速相机进行拍摄,一部高速相机拍摄大视场低空间分辨率流场,另一部高速相机同时拍摄局部位置处小视场高空间分辨率流场;
4、步骤二,搭建深度卷积神经网络,将piv测量到的流场结果输入卷积神经网络中进行超分辨率重构;
5、步骤三,将未经训练的大视场低分辨率数据输入训练好的深度卷积神经网络中,即可重构出大视场高空间分辨率流场。
6、进一步地,步骤一中,风洞实验考虑的工况为雷诺数re=3.3×104,piv采样频率为10hz,两台相机分别拍摄大、小视场的流场信息,大视场具有大范围但低空间分辨率,小视场的视野范围有限但具有高空间分辨率,小视场相机需要遍历整个流场。
7、进一步地,步骤二中,深度卷积神经网络有两部分组成,前一部分为卷积层,后一部分为上采样层,使用卷积层对流场信息进行特征提取,然后使用上采样层进行分辨率提升。
8、进一步地,根据具体放大的倍数确定上采样层的层数,卷积核大小均选取为3×3,所有的激活函数均采用relu函数,如式(1):
9、f(x)=max(0,x) (1)
10、其中,f(x)表示relu函数,max(0,x)表示取0和x的最大值;
11、卷积层的操作过程如式(2):
12、
13、式中,为第l层的输出,σ为激活函数,k为卷积核的数量,h为卷积核尺寸,为第l层的权重,为第l层的偏置,i和j表示输出特征图的空间维度索引,m表示输出特征图的通道索引,表示第l-1层的输入特征图,其中s和t表示输入特征图的空间维度索引,k表示输入特征图的通道索引。
14、进一步地,深度卷积神经网络通过学习低空间分辨率流场和高空间分辨率流场之间的映射关系fθ'重构出整个流场的高空间分辨率信息,如式(3):
15、
16、式中,u(xlr)是低空间分辨率流场速度,fθ'是深度卷积神经网络学习到的低空间分辨率流场和高空间分辨率流场之间的映射函数,是卷积神经网络重构的高空间分辨率流场速度。
17、进一步地,深度卷积神经网络的损失函数为:
18、
19、式中,u(xhr)是真实高空间分辨率流场速度,是卷积神经网络重构的高空间分辨率流场速度,npic是流场快照数量。
20、进一步地,步骤三中,与真实流场进行对比,定义时间域上的误差为相对误差,定义空间域上的误差为相对重构误差:
21、
22、
23、式中,ε(t)为x位置处速度在时间域内的相对误差,u(x,t)为x位置处t时刻速度的真实值,为x位置处t时刻速度的重构值,为整个流场在时间域内相对误差的平均值,n为时间总数;
24、
25、式中,ε(x)为整个流场在空间域内的相对误差,u(xq,t)为t时刻xq位置处速度的真实值,为t时刻xq位置处速度的重构值,n为位置总数。
26、本发明提出一种基于卷积神经网络的大视场高空间分辨率流场重构系统,所述系统包括:
27、获取模块:获得流场数据;采用粒子图像测速技术piv进行流场测量,同时使用两部高速相机进行拍摄,一部高速相机拍摄大视场低空间分辨率流场,另一部高速相机同时拍摄局部位置处小视场高空间分辨率流场;
28、搭建模块:搭建深度卷积神经网络,将piv测量到的流场结果输入卷积神经网络中进行超分辨率重构;
29、重构模块:将未经训练的大视场低分辨率数据输入训练好的深度卷积神经网络中,即可重构出大视场高空间分辨率流场。
30、本发明还提出一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现所述一种基于卷积神经网络的大视场高空间分辨率流场重构方法的步骤。
31、本发明还提出一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时实现所述一种基于卷积神经网络的大视场高空间分辨率流场重构方法的步骤。
32、与现有技术相比,本发明的有益效果是:
33、本发明提出了一种基于卷积神经网络的大视场高空间分辨率流场重构方法,本发明针对piv测量流场视场范围有限的问题,建立了深度卷积神经学习局部位置处小视场高空间分辨率流场和大视场低空间分辨率流场信息之间的映射关系,以此重构出大视场高空间分辨率流场。本发明使用tensorflow深度学习框架搭建深度卷积神经网络模型,可用于进行流场的高空间分辨率重构,能够有效减少piv实验中多视场同步拼接所需的相机数量,有效降低实验成本。
技术特征:
1.一种基于卷积神经网络的大视场高空间分辨率流场重构方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,步骤一中,风洞实验考虑的工况为雷诺数re=3.3×104,piv采样频率为10hz,两台相机分别拍摄大、小视场的流场信息,大视场具有大范围但低空间分辨率,小视场的视野范围有限但具有高空间分辨率,小视场相机需要遍历整个流场。
3.根据权利要求1所述的方法,其特征在于,步骤二中,深度卷积神经网络有两部分组成,前一部分为卷积层,后一部分为上采样层,使用卷积层对流场信息进行特征提取,然后使用上采样层进行分辨率提升。
4.根据权利要求3所述的方法,其特征在于,根据具体放大的倍数确定上采样层的层数,卷积核大小均选取为3×3,所有的激活函数均采用relu函数,如式(1):
5.根据权利要求4所述的方法,其特征在于,深度卷积神经网络通过学习低空间分辨率流场和高空间分辨率流场之间的映射关系fθ'重构出整个流场的高空间分辨率信息,如式(3):
6.根据权利要求5所述的方法,其特征在于,深度卷积神经网络的损失函数为:
7.根据权利要求1所述的方法,其特征在于,步骤三中,与真实流场进行对比,定义时间域上的误差为相对误差,定义空间域上的误差为相对重构误差:
8.一种基于卷积神经网络的大视场高空间分辨率流场重构系统,其特征在于,所述系统包括:
9.一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1-7任一项所述方法的步骤。
10.一种计算机可读存储介质,用于存储计算机指令,其特征在于,所述计算机指令被处理器执行时实现权利要求1-7任一项所述方法的步骤。
技术总结
本发明提出一种基于卷积神经网络的大视场高空间分辨率流场重构方法。该方法基于局部小视场高空间分辨率粒子图像测速技术PIV测量结果和大视场低空间分辨率测量结果,采用卷积神经网络学习大视场低分辨率流场和小视场高分辨率流场之间的映射关系,通过滑动窗口遍历整个流场即可重构出大视场高空间分辨率流场。本发明无需采用多台PIV设备同时拍摄流场进行拼接,只需采用两台PIV即可较好地重构出大视场高空间分辨率流场。
技术研发人员:赖马树金,周旭曦,金晓威,金耀
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/7/23
- 还没有人留言评论。精彩留言会获得点赞!