基于离散化投影光线的面结构光三维点云重建方法及系统
本发明涉及光栅投影三维检测,尤其涉及基于离散化投影光线的面结构光三维点云重建方法及系统。
背景技术:
1、近几十年来,随着微光学、微电子学和集成技术等关键领域的不断发展,工业产品设计逐渐走向高精度化和微型化。这种趋势不仅显著影响到了电路板、微型机械、半导体设备和精密仪器等多个领域,也促使我们对高密度微型产品的自动化几何检测技术进行更深入的研究。在此背景下,新兴的基于面结构光的三维点云重建技术展现出巨大潜力,它能为复杂场景下的应用提供一种可靠的解决方案,满足现代制造业对精确度和效率的高标准要求。
2、在常规的基于光栅投影的面结构光三维重建技术现有的重建方法中,有两个主要的经典类别:相位-高度映射和立体视觉。然而,当前采用的相位-高度映射近似多项式方法并没有基于成像模型进行严格的推导,这导致了无法合理确定多项式的次数。由于多项式次数的选择与透镜畸变模型紧密相关,而透镜的畸变特性在此方法中并没有得到充分的考虑,因此,该方法在准确性上存在局限。另一种立体视觉模型考虑透镜畸变是有效的。然而,同源点搜索的过程消耗存在不可忽略的时间成本。
技术实现思路
1、本发明主要目的在于提供一种可提高三维重建的速度和精度的基于离散化投影光线的面结构光三维点云重建方法及系统。
2、本发明所采用的技术方案是:
3、提供一种基于离散化投影光线的面结构光三维点云重建方法,包括以下步骤:
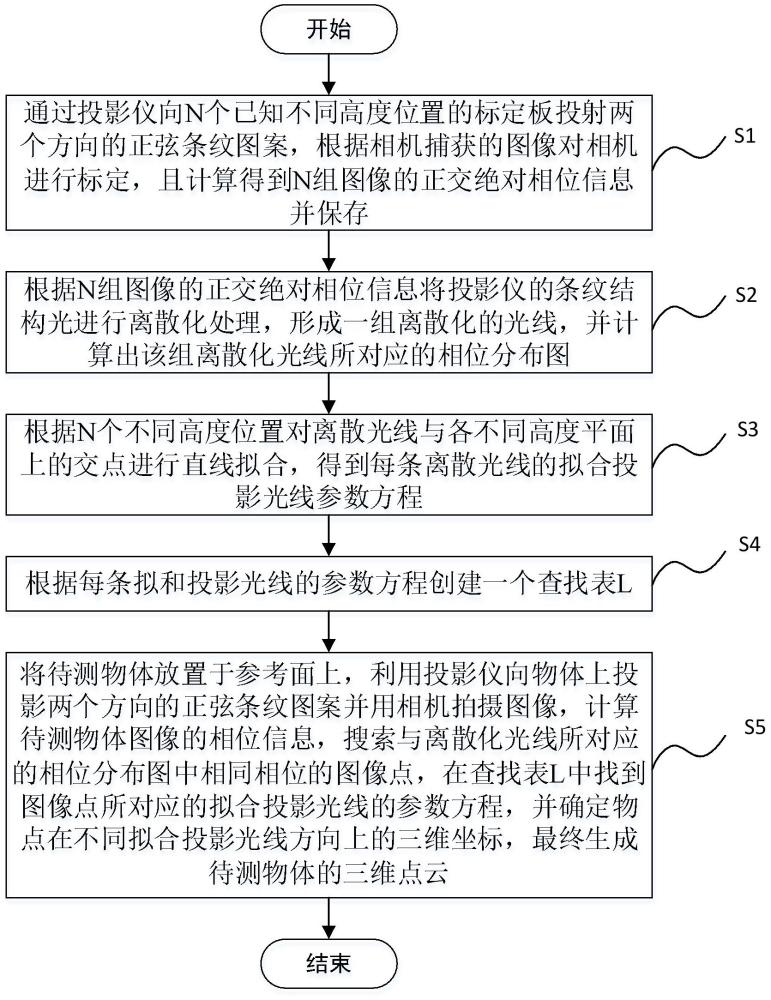
4、s1、通过投影仪向n个已知不同高度位置的标定板投射两个方向的正弦条纹图案,根据相机捕获的图像对相机进行标定,且计算得到n组图像的正交绝对相位信息并保存,其中n≥10;
5、s2、根据n组图像的正交绝对相位信息将投影仪的条纹结构光进行离散化处理,形成一组离散化的光线,并计算出该组离散化光线所对应的相位分布图;
6、s3、根据n个不同高度位置对离散光线与各不同高度平面上的交点进行直线拟合,得到每条离散光线的拟合投影光线参数方程;
7、s4、根据每条拟和投影光线的参数方程创建一个查找表l;
8、s5、将待测物体放置于参考面上,利用投影仪向物体上投影两个方向的正弦条纹图案并用相机拍摄图像,计算待测物体图像的相位信息,搜索与离散化光线所对应的相位分布图中相同相位的图像点,在查找表l中找到图像点所对应的拟合投影光线的参数方程,并确定物点在不同拟合投影光线方向上的三维坐标,最终生成待测物体的三维点云。
9、接上述技术方案,步骤s1中对计算得到的n组正交绝对相位图先去除畸变后再保存。
10、接上述技术方案,步骤s2的具体方法为:
11、在n组正交绝对相位图中检索出水平方向相位最大值和最小值,垂直方向相位最大值和最小值,假设投影仪分辨率为row·col,则水平采样间隔为,垂直采样间隔为,每条光线对应一个相位值,得到离散化光线对应的相位分布图。
12、接上述技术方案,步骤s3的具体方法为:
13、在n组正交绝对相位图中检索与离散化光线相位分布图中相同相位的图像点,通过相机标定的参数矩阵确定图像点对应的反投影光线,反投影光线与标定板平面相交获得各个交点的坐标为,,…,;对多个交点进行直线拟合。
14、接上述技术方案,查找表l中每条光线的参数被结构化的存储,以通过图像点索引直接检索到特定的光线参数。
15、接上述技术方案,标定板为圆形标定板。
16、接上述技术方案,具体通过一z轴移动平台来放置标定板并调节标定板的高度位置。
17、接上述技术方案,该方法还包括步骤:
18、s0、搭建基于离散化投影光线的面结构光三维点云重建系统,所述系统包括一台工业相机、一台投影仪、一个z轴移动平台和一块标定板,标定板通过该z轴移动平台调节n个不同高度位置。
19、本发明还提供一种基于离散化投影光线的面结构光三维点云重建系统,该系统包括一台工业相机、一台投影仪、一个z轴移动平台、一台计算机和一块标定板,通过该系统实现上述技术方案所述的基于离散化投影光线模型的面结构光三维点云重建方法。
20、本发明产生的有益效果是:本发明基于离散化投影光线的面结构光三维点云重建方法通过调节n个已知不同高度位置的标定板,得到n组图像的正交绝对相位信息,并将投影仪的条纹结构光进行离散化处理,形成一组离散化的光线,计算出该组离散化光线所对应的相位分布图;通过拟合离散光线的参数方程来检索投影光线对应的空间坐标,从而无需标定投影仪内外参数,避免了标定投影仪时同源点搜索的耗时,提升了三维重建速度和精度,使其满足高精度的物体检测的要求,实现了对精密物体缺陷的检测。
21、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种基于离散化投影光线的面结构光三维点云重建方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于离散化投影光线的面结构光三维点云重建方法,其特征在于,步骤s1中对计算得到的n组正交绝对相位图先去除畸变后再保存。
3.根据权利要求1所述的基于离散化投影光线的面结构光三维点云重建方法,其特征在于,步骤s2的具体方法为:
4.根据权利要求1所述的基于离散化投影光线的面结构光三维点云重建方法,其特征在于,步骤s3的具体方法为:
5.根据权利要求1所述的基于离散化投影光线的面结构光三维点云重建方法,其特征在于,查找表l中每条光线的参数被结构化的存储,以通过图像点索引直接检索到特定的光线参数。
6.根据权利要求1-5中任一项所述的基于离散化投影光线的面结构光三维点云重建方法,其特征在于,标定板为圆形标定板。
7.根据权利要求1-5中任一项所述的基于离散化投影光线的面结构光三维点云重建方法,其特征在于,具体通过一z轴移动平台来放置标定板并调节标定板的高度位置。
8.根据权利要求1所述的基于离散化投影光线的面结构光三维点云重建方法,其特征在于,该方法还包括步骤:
9.一种基于离散化投影光线的面结构光三维点云重建系统,其特征在于,该系统包括一台工业相机、一台投影仪、一个z轴移动平台、一台计算机和一块标定板,通过该系统实现如权利要求1-5中任一项所述的基于离散化投影光线模型的面结构光三维点云重建方法。
技术总结
本发明公开了一种基于离散化投影光线的面结构光三维点云重建方法,包括:通过投影仪向N个已知不同高度位置的标定板投射两个方向的正弦条纹图案,根据相机捕获的图像对相机进行标定,且计算得到N组图像的正交绝对相位信息并保存;将投影仪的条纹结构光进行离散化处理并计算出组离散化光线所对应的相位分布图;进行直线拟合,得到每条离散光线的拟合投影光线参数方程并创建一个查找表;将待测物体放置于参考面上,投影并计算待测物体图像的相位信息,查表找到图像点所对应的拟合投影光线的参数方程并确定物点在不同拟合投影光线方向上的三维坐标,最终生成待测物体的三维点云。本发明提高了三维重建的速度和精度。
技术研发人员:洪汉玉,杨紫文,朱映,叶亮,赵梓博,陈凌
受保护的技术使用者:武汉工程大学
技术研发日:
技术公布日:2024/5/29
- 还没有人留言评论。精彩留言会获得点赞!