点云数据的处理方法、装置、设备及存储介质与流程
本公开实施例涉及计算机,尤其涉及一种点云数据的处理方法、装置、设备及存储介质。
背景技术:
1、在智能驾驶场景中,无人车需要对感知范围内的障碍物进行检测和跟踪。检测算法需要准确地判断障碍物的类型和位置,如小汽车、卡车、行人等。跟踪算法是在一段数据序列中,给定第一帧目标物体的位置和尺寸信息(标定框)后,在后续的每一帧中对目标物体的位置和大小进行预测,对所框定的目标进行持久的鲁棒性追踪。
2、解决多目标跟踪(multi-object tracking,mot)问题有两种基本方法,一种是先检测后跟踪(tracking-by-detection,tbd),将检测和跟踪作为两个独立任务来对待。另外一种是联合检测和跟踪两个任务(joint detection andtracking,jdt),进行端到端(end-to-end)地学习训练。端到端的跟踪模型将特征提取和响应生成融合在深度学习框架中,更有利于整体性能提升,但是算法构建难度较大,需要大量高质量的跟踪标注数据。
3、端到端的跟踪算法属于有监督的机器学习算法,对于训练集,训练数据必须保证在同一个轨迹数据序列中,三维(3-dimension,3d)点云目标必须是连续并且具备较高的质量。目前此类标注数据一般是由人工标注产生的,由人工标注一般将原始数据做抽帧处理,例如原始采集的点云数据是一秒十帧,实际标注按照半秒一帧进行标注,那么无法获得其中未标注四帧的真实数据,导致无法获得连续的多帧点云数据,将直接影响跟踪算法模型的精度与泛化性。
技术实现思路
1、本公开实施例提供一种点云数据的处理方法、装置、设备及存储介质,可以提高点云数据处理的准确性。
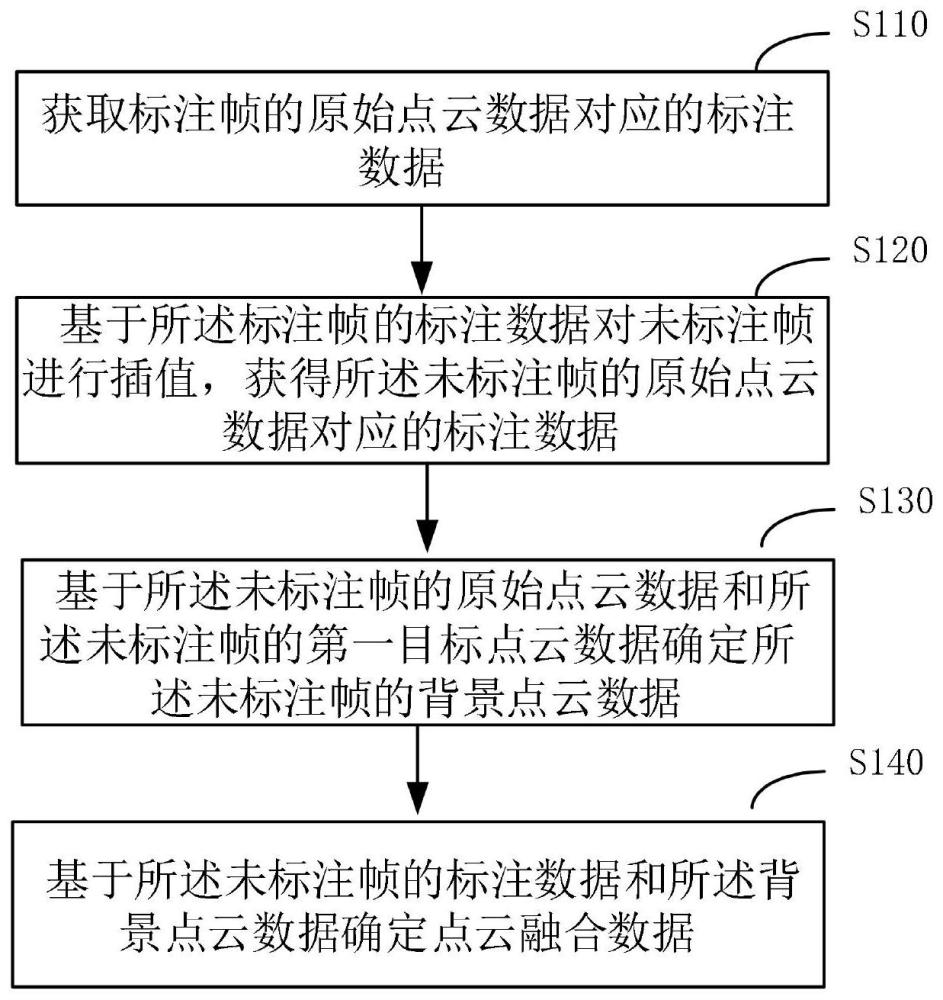
2、第一方面,本公开实施例提供了一种点云数据的处理方法,获取标注帧的原始点云数据对应的标注数据;基于所述标注帧的标注数据对未标注帧进行插值,获得所述未标注帧的原始点云数据对应的标注数据;基于所述未标注帧的原始点云数据和所述未标注帧的第一目标点云数据确定所述未标注帧的背景点云数据;其中,所述原始点云数据由所述第一目标点云数据和所述背景点云数据组成;基于所述未标注帧的标注数据和所述背景点云数据确定点云融合数据。
3、第二方面,本公开实施例还提供了一种点云数据的处理装置,包括:标注数据获取模块,用于获取标注帧的原始点云数据对应的标注数据;插值模块,用于基于所述标注帧的标注数据对未标注帧进行插值,获得所述未标注帧的原始点云数据对应的标注数据;背景点云确定模块,用于基于所述未标注帧的原始点云数据和所述未标注帧的第一目标点云数据确定所述未标注帧的背景点云数据;其中,所述原始点云数据由所述第一目标点云数据和所述背景点云数据组成;点云融合数据确定模块,用于基于所述未标注帧的标注数据和所述背景点云数据确定点云融合数据。
4、第三方面,本公开实施例还提供了一种电子设备,所述电子设备包括:
5、一个或多个处理器;
6、存储装置,用于存储一个或多个程序,
7、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如本公开实施例所述的点云数据的处理方法。
8、第四方面,本公开实施例还提供了一种包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行如本公开实施例所述的点云数据的处理方法。
9、本公开实施例的技术方案,通过获取标注帧的原始点云数据对应的标注数据;基于所述标注帧的标注数据对未标注帧进行插值,获得所述未标注帧的原始点云数据对应的标注数据;基于所述未标注帧的原始点云数据和所述未标注帧的第一目标点云数据确定所述未标注帧的背景点云数据;其中,所述原始点云数据由所述第一目标点云数据和所述背景点云数据组成;基于所述未标注帧的标注数据和所述背景点云数据确定点云融合数据。本公开实施例,通过基于所述标注帧的标注数据对未标注帧进行插值,获得所述未标注帧的原始点云数据对应的标注数据,并基于所述未标注帧的标注数据和所述背景点云数据确定点云融合数据的方式,可以提高点云数据处理的准确性,使得所计算出的未标注帧对应的标注数据以及云融合数据更加准确,从而可以得到准确的连续多帧的点云数据以及对应的标注数据,进而可以提高跟踪算法的精度和泛化性。
技术特征:
1.一种点云数据的处理方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,其中,所述标注数据包括目标点云的位置标注数据、朝向标注数据以及尺寸标注数据;基于所述标注帧的标注数据对未标注帧进行插值,获得所述未标注帧的原始点云数据对应的标注数据,包括:
3.根据权利要求2所述的方法,其特征在于,基于所述标注帧的位置标注数据对所述未标注帧进行插值,获得所述未标注帧的位置插值数据,包括:
4.根据权利要求2所述的方法,其特征在于,基于所述标注帧的朝向标注数据对所述未标注帧进行插值,获得所述未标注帧的朝向插值数据,包括:
5.根据权利要求2所述的方法,其特征在于,基于所述标注帧的尺寸标注数据对所述未标注帧进行插值,获得所述未标注帧的尺寸插值数据,包括:
6.根据权利要求1所述的方法,其特征在于,基于所述未标注帧的原始点云数据和所述未标注帧的第一目标点云数据确定所述未标注帧的背景点云数据,包括:
7.根据权利要求1所述的方法,其特征在于,基于所述未标注帧的标注数据和所述背景点云数据确定点云融合数据,包括:
8.一种点云数据的处理装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行如权利要求1-7中任一所述的点云数据的处理方法。
技术总结
本公开实施例提供了点云数据的处理方法、装置、设备及存储介质。该方法包括:通过获取标注帧的原始点云数据对应的标注数据;基于标注帧的标注数据对未标注帧进行插值,获得未标注帧的原始点云数据对应的标注数据;基于未标注帧的原始点云数据和未标注帧的第一目标点云数据确定未标注帧的背景点云数据;其中,原始点云数据由第一目标点云数据和背景点云数据组成;基于未标注帧的标注数据和背景点云数据确定点云融合数据。本公开实施例,可以提高点云数据处理的准确性,使得所计算出的未标注帧对应的标注数据以及云融合数据更加准确,从而可以得到准确的连续多帧的点云数据以及对应的标注数据,进而可以提高跟踪算法的精度和泛化性。
技术研发人员:王硕,陈光,王宇,李锦瑭,耿真,孙雪,薛鸿
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/8/15
- 还没有人留言评论。精彩留言会获得点赞!