可编程设备的远程编程和执行后摄像头实时查看系统的制作方法
本发明属于编程设备,具体涉及可编程设备的远程编程和执行后摄像头实时查看系统。
背景技术:
1、在现代化的工业生产中,可编程设备的应用越来越广泛,它们能够根据预设的程序执行各种任务。
2、但是目前的编程设备在具体使用时仍存在以下问题:
3、1、目前市面上的产品只能近距离蓝牙连接或者usb线接口连接进行编程。无法使用手机或者电脑远距离编程,即使使用了互联网进行了远程编程升级,也没有办法对实体机器人的编程进行第一视角的执行验证;
4、2、当远程编程出错时,机器人容易失控,导致无法控制机器人的行为,使用时存在一定的局限性。
技术实现思路
1、本发明要解决的技术问题是克服现有的缺陷,提供可编程设备的远程编程和执行后摄像头实时查看系统,以解决上述背景技术中提出的目前市面上的产品只能近距离蓝牙连接或者usb线接口连接进行编程。无法使用手机或者电脑远距离编程,即使使用了互联网进行了远程编程升级,也没有办法对实体机器人的编程进行第一视角的执行验证和当远程编程出错时,机器人容易失控,导致无法控制机器人的行为,使用时存在一定的局限性的问题。
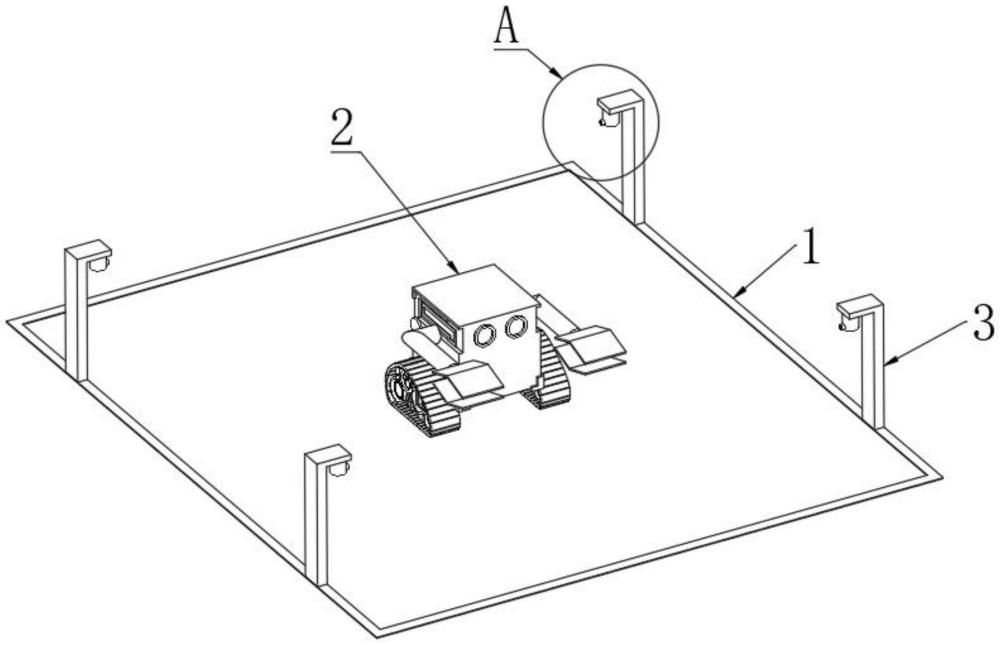
2、为实现上述目的,本发明提供如下技术方案:可编程设备的远程编程和执行后摄像头实时查看系统,包括电线条、机器人结构、场地摄像头、控制终端、5g通信模块、数据处理模块、反馈与交互模块和工厂终端,所述电线条设置在机器人结构的四周,所述场地摄像头安装在电线条的上端,所述场地摄像头包括连接杆和监控探头,所述监控探头安装在连接杆的顶端,所述机器人结构包括机器人主体、行走结构、抓取结构和机器人摄像头,所述机器人摄像头安装在机器人主体的正面表面,所述行走结构安装在机器人主体的下端,所述抓取结构安装在机器人主体的两侧表面,所述机器人主体的内部安装有5g通信模块,所述控制终端的输出端和5g通信模块的输入端之间相互电性连接,所述5g通信模块的输出端和数据处理模块的输入端之间相互电性连接,所述数据处理模块的输出端和反馈与交互模块的输入端之间相互电性连接,所述反馈与交互模块的输出端和工厂终端的输入端之间相互电性连接。
3、优选的,所述控制终端包括远程终端、编程模块、程序自检模块和程序入库模块。
4、优选的,所述远程终端的输出端和编程模块的输入端之间相互电性连接。
5、优选的,所述编程模块的输出端和程序自检模块的输入端之间相互电性连接。
6、优选的,所述程序自检模块的输出端和程序入库模块的输入端之间相互电性连接。
7、优选的,所述数据处理模块包括数据接收模块和试运行模块,所述数据处理模块的输出端和试运行模块的输入端之间相互电性连接。
8、优选的,所述反馈与交互模块包括发送指令模块和调整参数模块。
9、优选的,所述工厂终端包括霍尔传感器和环境传感器系统。
10、优选的,所述霍尔传感器安装在机器人主体的行走结构下端。
11、优选的,所述环境传感器系统包括声学传感器、光学传感器、电学传感器、磁场传感器和力学传感器。
12、与现有技术相比,本发明提供了可编程设备的远程编程和执行后摄像头实时查看系统,具备以下有益效果:
13、1、本发明通过设置的5g通信模块,使用时通过移动终端将编写的程序发送至工厂的机器人终端上,机器人终端可以根据编写的程序执行操作,使用者可以直接通过移动终端对机器人的周围环境和机器人整体的行为进行监控,从而判断自己的程序是否出现问题,实现了机器人或者设备可以不在身边,在很远的地方也能进行编程,这样客户在学习编程的时候,不需要购买设备也能验证自己的编程能力,有效地避免了目前市面上的产品只能近距离蓝牙连接或者usb线接口连接进行编程,无法使用手机或者电脑远距离编程,即使使用了互联网进行了远程编程升级,也没有办法对实体机器人的编程进行第一视角的执行验证等问题;
14、2、本发明通过设置的电线条和霍尔传感器,当机器人即使编程执行失败,触碰到电线条,且即将超程行驶时,通过霍尔传感器可以及时的感知,并对机器人正在执行的程序进行停止,对机器人进行复位,复位后的机器人会返回原先位置,从而保证了机器人执行程序时的安全性,即使程序有错误,也不会破坏环境,或者被环境限制和复位;
15、3、本发明通过设置的场地摄像头和机器人摄像头,使用时客户可以直接在远程终端上直接看到机器人所看到的画面,也可以切换至场地摄像头,根据四个场地摄像头的监控探头观察机器人的整体情况,使客户能够通过第一视角实时查看编程后的效果;
16、4、本发明实现了编程人员可以在任何时间、任何地点对机器人进行编程和监控的目的,不受地理位置的限制,提高了工作效率,5g信号的高带宽和低延迟特性保证了远程控制指令的实时传输,使编程人员可以即时调整机器人动作,并获取实时反馈;5g网络的高可靠性保证了数据传输的安全性和稳定性,减少了工业控制过程中的风险;
17、5、本发明无需在现场进行编程和监控,可以减少现场工作人员的数量,节省人力成本,通过远程方式进行编程和维护,可以简化现场设备的维护和升级过程;当机器人出现问题时,编程人员可以立即进行远程诊断和故障排除,减少停机时间,通过收集和分析机器人工作过程中的数据,可以不断优化程序,提高机器人的工作效率和准确性;在一些危险或人类难以到达的环境中,如核磁环境、水下、矿山等,机器人可以代替人类进行作业,提高作业的安全性。
技术特征:
1.可编程设备的远程编程和执行后摄像头实时查看系统,包括电线条(1)、机器人结构(2)、场地摄像头(3)、控制终端(4)、5g通信模块(5)、数据处理模块(6)、反馈与交互模块(7)和工厂终端(8),其特征在于:所述电线条(1)设置在机器人结构(2)的四周,所述场地摄像头(3)安装在电线条(1)的上端,所述场地摄像头(3)包括连接杆(301)和监控探头(302),所述监控探头(302)安装在连接杆(301)的顶端,所述机器人结构(2)包括机器人主体(204)、行走结构(202)、抓取结构(203)和机器人摄像头(201),所述机器人摄像头(201)安装在机器人主体(204)的正面表面,所述行走结构(202)安装在机器人主体(204)的下端,所述抓取结构(203)安装在机器人主体(204)的两侧表面,所述机器人主体(204)的内部安装有5g通信模块(5),所述控制终端(4)的输出端和5g通信模块(5)的输入端之间相互电性连接,所述5g通信模块(5)的输出端和数据处理模块(6)的输入端之间相互电性连接,所述数据处理模块(6)的输出端和反馈与交互模块(7)的输入端之间相互电性连接,所述反馈与交互模块(7)的输出端和工厂终端(8)的输入端之间相互电性连接。
2.根据权利要求1所述的可编程设备的远程编程和执行后摄像头实时查看系统,其特征在于:所述控制终端(4)包括远程终端(401)、编程模块(402)、程序自检模块(403)和程序入库模块(404)。
3.根据权利要求2所述的可编程设备的远程编程和执行后摄像头实时查看系统,其特征在于:所述远程终端(401)的输出端和编程模块(402)的输入端之间相互电性连接。
4.根据权利要求2所述的可编程设备的远程编程和执行后摄像头实时查看系统,其特征在于:所述编程模块(402)的输出端和程序自检模块(403)的输入端之间相互电性连接。
5.根据权利要求2所述的可编程设备的远程编程和执行后摄像头实时查看系统,其特征在于:所述程序自检模块(403)的输出端和程序入库模块(404)的输入端之间相互电性连接。
6.根据权利要求1所述的可编程设备的远程编程和执行后摄像头实时查看系统,其特征在于:所述数据处理模块(6)包括数据接收模块(601)和试运行模块(602),所述数据处理模块(6)的输出端和试运行模块(602)的输入端之间相互电性连接。
7.根据权利要求1所述的可编程设备的远程编程和执行后摄像头实时查看系统,其特征在于:所述反馈与交互模块(7)包括发送指令模块(701)和调整参数模块(702)。
8.根据权利要求1所述的可编程设备的远程编程和执行后摄像头实时查看系统,其特征在于:所述工厂终端(8)包括霍尔传感器(801)和环境传感器系统(802)。
9.根据权利要求8所述的可编程设备的远程编程和执行后摄像头实时查看系统,其特征在于:所述霍尔传感器(801)安装在机器人主体(204)的行走结构(202)下端。
10.根据权利要求8所述的可编程设备的远程编程和执行后摄像头实时查看系统,其特征在于:所述环境传感器系统(802)包括声学传感器(8021)、光学传感器(8022)、电学传感器(8023)、磁场传感器(8024)和力学传感器(8025)。
技术总结
本发明公开了可编程设备的远程编程和执行后摄像头实时查看系统,包括电线条、机器人结构、场地摄像头、控制终端、5G通信模块、数据处理模块、反馈与交互模块和工厂终端,所述电线条设置在机器人结构的四周,所述场地摄像头安装在电线条的上端,本发明通过设置的5G通信模块,使用时通过移动终端将编写的程序发送至工厂的机器人终端上,机器人终端可以根据编写的程序执行操作,使用者可以直接通过移动终端对机器人的周围环境和机器人整体的行为进行监控,从而判断自己的程序是否出现问题,实现了机器人或者设备可以不在身边,在很远的地方也能进行编程,这样客户在学习编程的时候,不需要购买设备也能验证自己的编程能力和编程真实效果。
技术研发人员:覃涵,宁绩
受保护的技术使用者:深圳市坤易电子有限公司
技术研发日:
技术公布日:2024/8/26
- 还没有人留言评论。精彩留言会获得点赞!