基于物面编码的高光谱三维协同成像方法
本发明涉及一种基于物面编码的高光谱三维协同成像方法,属于计算机图像处理。
背景技术:
1、在高光谱成像领域,由于物质的“指纹效应”使得光谱成像技术在遥感、医疗、文物保护等领域展现出了巨大的应用前景。成像波段的数量也从几十个波段的多光谱成像过渡到了成像波段更多的高光谱成像。在三维成像领域,由于其可以提供场景的深度信息,使得三维重建技术在医学影像、文物修复、自动驾驶等领域有着广泛的应用。
2、因此,鉴于高光谱成像与三维成像的优势,高光谱三维协同成像显的尤为重要,但由于成像维度的上升,数据量的增加,求解难度也随之变大。如何通过单套系统实现两种成像方式的结合成为研究的难点。在目前的高光谱三维协同成像方法中,主要有两种,一种基于压缩感知和深度学习,可以实现瞬态成像,但由于其重建是个高度病态的过程,重建质量高度依赖于算法且可迁移性较差,所以重建质量并不理想。另外一种是基于融合的思想,主要是通过采集两个维度的数据进行数据融合后再显示。融合精度受制于采集系统的匹配度及融合算法的置信度,且同时采集数据花费的时间也相应较大,成像质量也一般,不能同时兼顾普适性和高效性。
3、因此,需要一种基于物面编码的高光谱三维协同成像方法以解决上述问题。
技术实现思路
1、发明目的:针对现有技术所存在的问题,本发明提供一种基于物面编码的高光谱三维协同成像方法。
2、一种基于物面编码的高光谱三维协同成像方法,采用高光谱三维协同成像系统,所述高光谱三维协同成像系统包括投影器件、色散器件和图像采集器件,所述投影器件和图像采集器件同步触发,所述投影器件和图像采集器件均正对物体,所述投影器件和物体之间设置有所述色散器件,对系统进行标定时,所述物体为标定器件;
3、包括以下步骤:
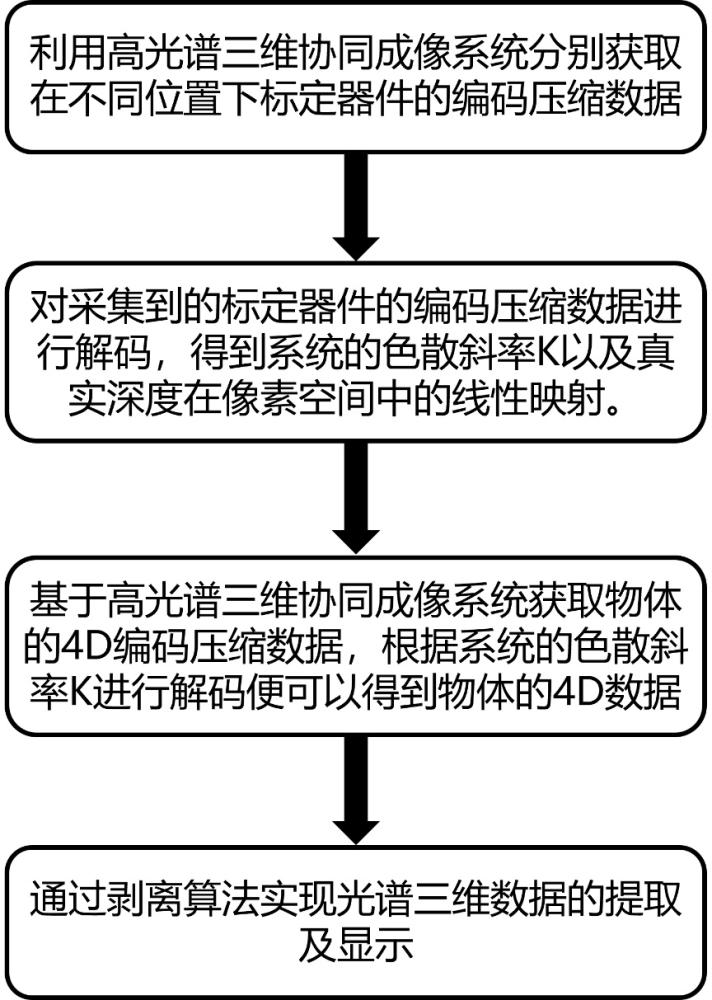
4、步骤一、所述高光谱三维协同成像系统分别获取在不同位置下标定器件的编码压缩数据;
5、步骤二、对采集到的标定器件的编码压缩数据进行解码,得到系统的色散斜率k以及真实深度在像素空间中的线性映射;
6、步骤三、利用高光谱三维协同成像系统获取物体的4d编码压缩数据,根据系统的色散斜率k进行逆色散操作得到物体的4d数据;
7、步骤四、通过剥离算法将物体的4d数据进行数据剥离,得到物体的光谱三维数据。
8、更进一步的,所述标定器件为标准平板,所述投影器件为dlp条纹投影仪,所述图像采集器件为灰度相机,所述色散器件为艾米西色散棱镜。
9、更进一步的,还包括导轨,所述标定器件设置在所述导轨上。
10、更进一步的,所述导轨为步进位移台。
11、更进一步的,步骤一中编码压缩数据的编码过程采用哈达玛矩阵编码,步骤二中对采集到的标定器件的编码压缩数据进行解码采用哈达玛矩阵求逆。
12、更进一步的,步骤二中对采集到的标定器件的编码压缩数据进行解码,得到系统的色散斜率k以及真实深度在像素空间中的线性映射具体为:通过对某一位置解码数据的线性校正得到系统的色散斜率k,通过对不同位置所对应像素空间中解码数据的线性拟合得到真实深度在像素空间中的线性映射。
13、更进一步的,步骤三中利用高光谱三维协同成像系统获取物体的4d编码压缩数据,所述4d编码压缩数据通过下式表示:
14、,
15、式中,表示色散器件的色散斜率,表示光谱维,表示色散操作,表示删除操作,表示插入操作,表示在中随深度删除的编码信息,表示在中随深度嵌入的零向量,表示n阶哈达玛矩阵,表示第i行对应光谱维的y轴坐标信息,表示光谱深度信息,表示被复制了层,代表哈达玛积。
16、更进一步的,步骤三中利用高光谱三维协同成像系统获取物体的4d编码压缩数据,根据系统的色散斜率k进行逆色散操作得到物体的4d数据具体为:利用高光谱三维协同成像系统获取物体的4d编码压缩数据,对物体的4d编码压缩数据进行解码得到未色散回的光谱三维数据,然后根据系统的色散斜率k进行逆色散操作得到物体的4d数据。
17、更进一步的,对物体的4d编码压缩数据进行解码得到未色散回的光谱三维数据具体为:对采集到的压缩编码数据进行哈达玛矩阵求逆得到未色散回的光谱三维数据。
18、更进一步的,步骤四中通过剥离算法将物体的4d数据进行数据剥离,得到物体的光谱三维数据,包括以下步骤:
19、41、通过设定阈值对4d数据进行预处理,得到无噪声干扰的4d数据;
20、42、通过选取中心点的操作得到某一个光谱维度下所有中心点的位置坐标,将所有记录点的灰度值按坐标进行提取,即可恢复该光谱维度下对应场景的三维形貌,其余光谱维度的数据只需按照记录点的坐标在4d数据中错位提取即可得到物体的光谱三维数据。
21、有益效果:本发明的基于物面编码的高光谱三维协同成像方法的光谱三维数据的求解过程无需数据融合及相位求解,可以实现较高精度的高光谱三维协同成像。采用的高光谱三维协同成像系统结构简单,组成器件尺寸较小,适合小型化设计。
技术特征:
1.一种基于物面编码的高光谱三维协同成像方法,其特征在于,采用高光谱三维协同成像系统,所述高光谱三维协同成像系统包括投影器件、色散器件和图像采集器件,所述投影器件和图像采集器件同步触发,所述投影器件和图像采集器件均正对物体,所述投影器件和物体之间设置有所述色散器件,对系统进行标定时,所述物体为标定器件;
2.如权利要求1所述的基于物面编码的高光谱三维协同成像方法,其特征在于,所述标定器件为标准平板,所述投影器件为dlp条纹投影仪,所述图像采集器件为灰度相机,所述色散器件为艾米西色散棱镜。
3.如权利要求1所述的基于物面编码的高光谱三维协同成像方法,其特征在于,还包括导轨,所述标定器件设置在所述导轨上。
4.如权利要求3所述的基于物面编码的高光谱三维协同成像方法,其特征在于,所述导轨为步进位移台。
5.如权利要求1所述的基于物面编码的高光谱三维协同成像方法,其特征在于,步骤一中编码压缩数据的编码过程采用哈达玛矩阵编码,步骤二中对采集到的标定器件的编码压缩数据进行解码采用哈达玛矩阵求逆。
6.如权利要求1所述的基于物面编码的高光谱三维协同成像方法,其特征在于,步骤二中对采集到的标定器件的编码压缩数据进行解码,得到系统的色散斜率k以及真实深度在像素空间中的线性映射具体为:通过对某一位置解码数据的线性校正得到系统的色散斜率k,通过对不同位置所对应像素空间中解码数据的线性拟合得到真实深度在像素空间中的线性映射。
7.如权利要求1所述的基于物面编码的高光谱三维协同成像方法,其特征在于,步骤三中利用高光谱三维协同成像系统获取物体的4d编码压缩数据,所述4d编码压缩数据通过下式表示:
8.如权利要求1所述的基于物面编码的高光谱三维协同成像方法,其特征在于,步骤三中利用高光谱三维协同成像系统获取物体的4d编码压缩数据,根据系统的色散斜率k进行逆色散操作得到物体的4d数据具体为:利用高光谱三维协同成像系统获取物体的4d编码压缩数据,对物体的4d编码压缩数据进行解码得到未色散回的光谱三维数据,然后根据系统的色散斜率k进行逆色散操作得到物体的4d数据。
9.如权利要求8所述的基于物面编码的高光谱三维协同成像方法,其特征在于,对物体的4d编码压缩数据进行解码得到未色散回的光谱三维数据具体为:对采集到的压缩编码数据进行哈达玛矩阵求逆得到未色散回的光谱三维数据。
10.如权利要求1所述的基于物面编码的高光谱三维协同成像方法,其特征在于,步骤四中通过剥离算法将物体的4d数据进行数据剥离,得到物体的光谱三维数据,包括以下步骤:
技术总结
本发明公开了一种基于物面编码的高光谱三维协同成像方法,采用高光谱三维协同成像系统,高光谱三维协同成像系统包括投影器件、色散器件和图像采集器件,包括如下步骤:基于高光谱三维协同成像系统获取不同位置下标定器件的编码压缩数据;对编码压缩数据进行解码,得到系统的色散斜率K以及真实深度在像素空间中的线性映射;基于高光谱三维协同成像系统获取物体的4D编码压缩数据,解码过程中根据色散斜率K进行逆色散操作便可以得到物体的4D数据;通过剥离算法将4D数据进行数据剥离,得到物体的光谱三维数据。本发明基于物面编码光谱成像系统可以实现在无数据融合无相位求解下的高精度高分辨率的高光谱三维协同成像。
技术研发人员:张毅,巩帅峰,赵壮,韩静,陆骏,李政,甘磊,张岩,张杰,雷嘎
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/6/26
- 还没有人留言评论。精彩留言会获得点赞!