一种基于U-Net和轮廓近似算法的遥感图像分割方法与流程
本发明属于遥感图像分割领域,具体涉及一种基于u-net和轮廓近似算法的遥感图像分割方法。
背景技术:
1、遥感图像分割是图像理解中的一个重要分支,在城市规划、变化检测以及地理信息系统构建等方面有着十分广泛的应用。遥感图像分割方法主要分为三大类:基于光谱的、基于空间的和基于语义的分割方法。
2、基于光谱的图像分割方法也称为基于点/像素的图像分割方法,主要集中于对单个像素的分析。其中,阈值分割是一种最古老、应用最广泛的基于光谱的图像分割算法,它包括图像阈值分割和特征空间分割。阈值算法假设像素属于感兴趣的图像对象,具有相当明显的属性。聚类方法也是一种基于光谱的图像分割算法,通常涉及对光谱特征空间进行划分,将单个像素分配到一个聚类中,而不考虑它们的邻居。接下来,需要一个后处理步骤,通过合并具有相同簇值的相邻像素来创建区域。
3、基于空间的图像分割方法包括边缘检测算法、区域合并算法和图划分算法。其中,基于边缘的图像分割方法模仿人类理解图像对象的方式,试图检测区域之间的边缘,并将区段定义为这些边缘范围内的区域。基于区域的图像分割算法可以分为区域增长、区域合并和分割。区域生长技术(自下而上的方法)倾向于聚集像素,从几个种子像素开始。然后,根据相似性标准将相邻像素连接到这些主种子像素,并保持该过程,直到达到目标阈值。在基于图的方法框架中,图像分割被视为图划分问题,其中节点通常描述单个像素或区域,而边缘连接空间相邻节点。每条边的权重表示像素之间的不相似性。主要思想是识别子图,对应于图像中的聚类。
4、与上述专注于提取同质区域的方法不同,语义分割方法为每个像素分配其相应图像对象的类标签。作为一种基于学习的框架,语义分割受到机器学习的影响,有几组相对成熟的算法被提出,包括马尔可夫随机场、贝叶斯网络、k最近邻算法、支撑向量机和随机森林算法。最近,由于深度学习(dl)架构,语义分割的性能得到了快速增强。dl网络由几个层(通常称为隐藏层)组成,这些层将输入数据(图像)转换为输出(对象标签)。特别是,基于卷积神经网络(cnn)的语义分割模型的兴起和全连接网络(fcn)的发展有助于遥感图像语义分割的突破。基于fcn的改进网络也相继被广泛提出,其中大多数网络都采用编码器–解码器架构,例如segnet和u-net等。相比于传统的基于光谱或空间的图像分割算法,深度学习方法的优点在于它们的性能更优,对标注数据依赖较少,可以更好地处理复杂的图像分割任务。同时,与segnet等网络结构相比,u-net具有训练时间短,结构简单,样本需求少等优势,适用于样本量不足的情况。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是如何提供一种基于u-net和轮廓近似算法的遥感图像分割方法,以解决。
3、(二)技术方案
4、为了解决上述技术问题,本发明提出一种基于u-net和轮廓近似算法的遥感图像分割方法,该方法包括如下步骤:
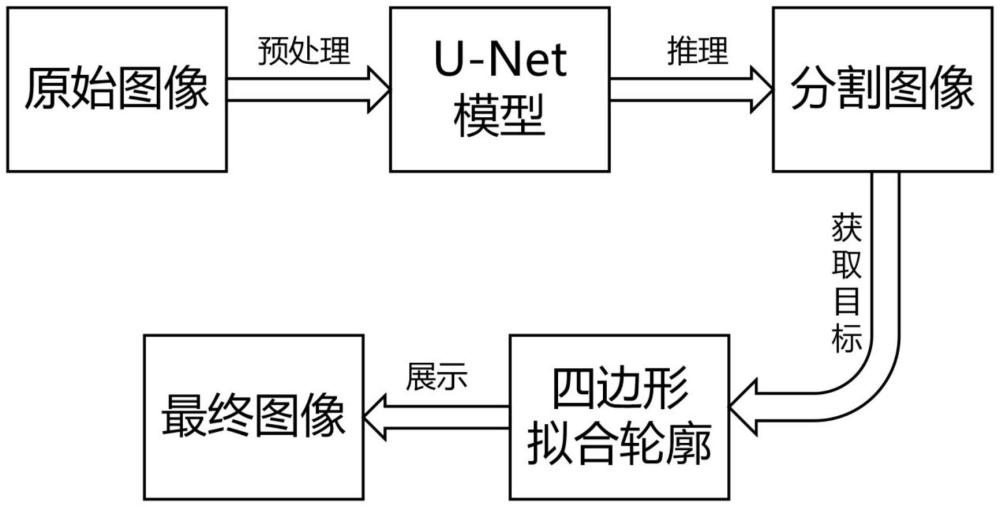
5、s1、获取原始图像,并进行预处理操作;预处理操作包括图像的重新尺寸定义、归一化和标准化;
6、s2、使用训练数据集对图像分割模型u-net进行训练,将预处理后的图像输入训练好的图像分割模型u-net,进行初步推理得到分割图像;
7、s3、获取分割图像中的目标并进行后处理操作,得到最终图像,其中,后处理操作包括二值处理、轮廓检测和最小外包矩形框生成。
8、(三)有益效果
9、本发明提出一种基于u-net和轮廓近似算法的遥感图像分割方法,对低空无人机拍摄下的大棚进行检测,之后采用轮廓近似算法对检测的初步结果进行四边形拟合,本发明清晰地表示图像中大棚的边界。本发明适用于样本量较少在情况,本发明的轮廓近似算法将分割出的目标进行四边形拟合,更加突出目标所在区域。
技术特征:
1.一种基于u-net和轮廓近似算法的遥感图像分割方法,其特征在于,该方法包括如下步骤:
2.如权利要求1所述的基于u-net和轮廓近似算法的遥感图像分割方法,其特征在于,所述s1中,将原始图像尺寸重新定义为256*256,并将[0,255]的像素值归一化为[0,1],再对归一化的图像进行标准化。
3.如权利要求2所述的基于u-net和轮廓近似算法的遥感图像分割方法,其特征在于,归一化公式为:
4.如权利要求3所述的基于u-net和轮廓近似算法的遥感图像分割方法,其特征在于,标准化时使用的标准化均值和方差采用imagenet数据集的均值和方差。
5.如权利要求4所述的基于u-net和轮廓近似算法的遥感图像分割方法,其特征在于,三个通道的均值分别是mean=(0.485,0.456,0.406),方差分别是std=(0.229,0.224,0.225)。
6.如权利要求1-5任一项所述的基于u-net和轮廓近似算法的遥感图像分割方法,其特征在于,u-net网络结构是编码器-解码器结构,编码器包括卷积层和最大池化层,负责逐步提取输入图像的特征并降低空间分辨率;解码器包括卷积层和反卷积层,通过上采样操作将特征图恢复到原始输入图像的尺寸,并逐步生成分割结果;此外,u-net在解码器中引入了跳跃连接,即将编码器中的特征图与解码器中对应的特征图进行连接,跳跃连接帮助解码器更好地利用不同层次的特征信息,从而提高图像分割的准确性和细节保留能力。
7.如权利要求6所述的基于u-net和轮廓近似算法的遥感图像分割方法,其特征在于,在使用u-net进行推理前,使用u-net在训练数据集上进行训练,保留训练后的权重,用于测试集的推理;在训练的过程中,训练数据集需要包括原始图片和标签图片,其中原始图片中包括丰富的物体,标签图片为二值图,白色区域为目标,其余均为黑色区域。
8.如权利要求7所述的基于u-net和轮廓近似算法的遥感图像分割方法,其特征在于,二值处理时,通过设置阈值127将步骤s2推理得到分割图像转化成黑白二值图。
9.如权利要求8所述的基于u-net和轮廓近似算法的遥感图像分割方法,其特征在于,轮廓检测时,调用opencv中的findcontours函数对二值图中的目标进行轮廓检测,轮廓检索模式选择retr_tree,即检索所有轮廓并建立一个等级树结构的轮廓;轮廓逼近方法选择chain_approx_simple,即压缩水平、垂直、对角线方向的元素,只保留该方向的终点坐标;最终返回轮廓坐标数组。
10.如权利要求9所述的基于u-net和轮廓近似算法的遥感图像分割方法,其特征在于,最小外包矩形框生成时,调用minarearect函数生成最小外包矩形框,该函数以轮廓坐标数组为输入,输出最小外包矩形的中心坐标、宽度、高度和旋转角度,最后调用drawcoutours函数在二值图上绘制该矩形框。
技术总结
本发明涉及一种基于U‑Net和轮廓近似算法的遥感图像分割方法,属于遥感图像分割领域。本发明获取原始图像,并进行预处理操作;预处理操作包括图像的重新尺寸定义、归一化和标准化;使用训练数据集对图像分割模型U‑Net进行训练,将预处理后的图像输入训练好的图像分割模型U‑Net,进行初步推理得到分割图像;获取分割图像中的目标并进行后处理操作,得到最终图像,其中,后处理操作包括二值处理、轮廓检测和最小外包矩形框生成。本发明能清晰地表示图像中大棚的边界,更加突出目标所在区域。
技术研发人员:刘朋杰,任建新,杨恒,陈美玲
受保护的技术使用者:北京计算机技术及应用研究所
技术研发日:
技术公布日:2024/8/20
- 还没有人留言评论。精彩留言会获得点赞!