基于有限泛化的失败概率估计方法、装置及存储介质与流程
本文件涉及失败概率估计,尤其涉及一种基于有限泛化的失败概率估计方法、装置及存储介质。
背景技术:
1、随着自动驾驶技术的加速发展与应用落地,自动驾驶系统存在的各种风险可以通过仿真测试在虚拟环境中模拟各种复杂的路况和交通情况,对自动驾驶汽车的各项功能进行测试,从而发现潜在的安全隐患,保障自动驾驶汽车的安全性。
2、现有技术主要利用可靠性分析算法或优化算法进行迭代采样,使样本逐步收敛到造成被测试系统或车辆失败的场景下,进而通过蒙特卡罗等方法进行失败概率的估计。
3、由于现有技术中部分场景下车辆的表现可能只存在波动,就是即将失败却又没有失败的场景,对于这些没有故障或故障极少的车辆运行数据,难以利用现有技术估计被测试系统或车辆的失败概率,或是其测量出的失败概率准确度较低,从而影响自动驾驶的安全性能,增加自动驾驶的风险,影响交通安全。
技术实现思路
1、鉴于上述方案,本申请旨在提出一种基于有限泛化的失败概率估计方法、装置及存储介质,以解决上述技术问题中的至少一个。
2、第一方面,本说明书一个或多个实施例提供了一种基于有限泛化的失败概率估计方法,包括:
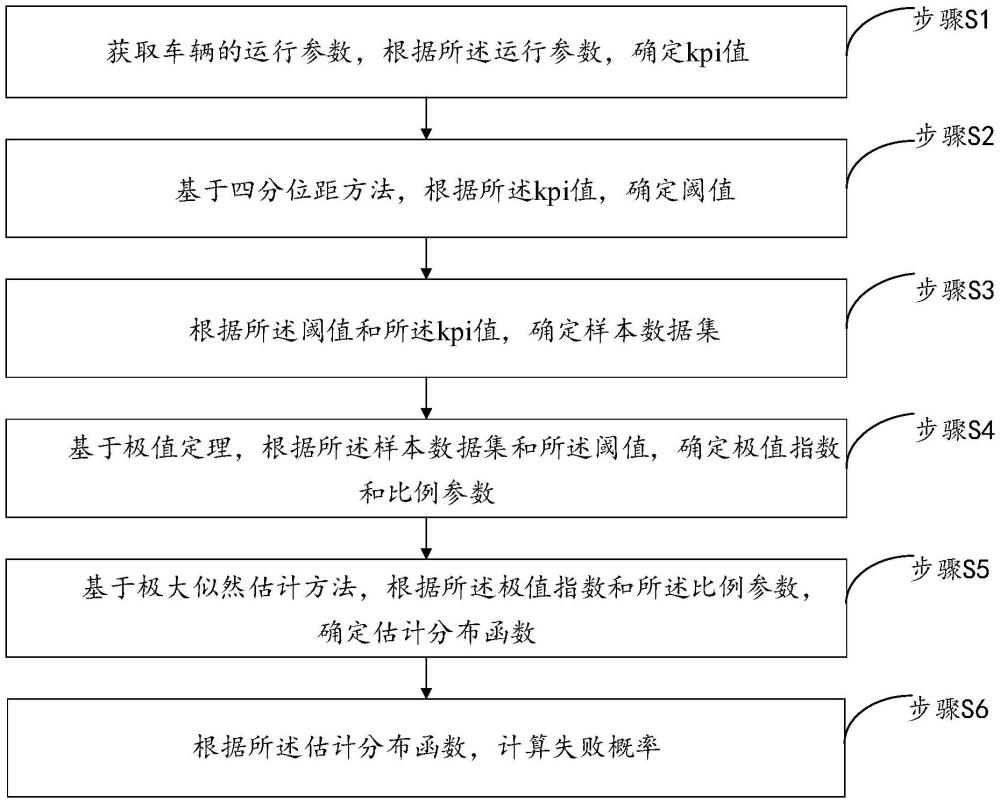
3、获取车辆的运行参数,根据所述运行参数,确定kpi值;
4、基于四分位距方法,根据所述kpi值,确定阈值;
5、根据所述阈值和所述kpi值,确定样本数据集;
6、基于极值定理,根据所述样本数据集和所述阈值,确定极值指数和比例参数;
7、基于极大似然估计方法,根据所述极值指数和所述比例参数,确定估计分布函数;
8、根据所述估计分布函数,计算失败概率。
9、进一步地,基于1.5倍四分位距方法,对所述kpi值进行排序,计算所述kpi值的上四分位数和下四分位数;
10、基于1.5倍四分位距方法,根据所述上四分位数和所述下四分位数,确定所述阈值。
11、进一步地,根据所述样本数据集和所述阈值,构建广义帕累托分布函数和车辆表现分布函数;
12、基于极值定理,根据所述广义帕累托分布函数和所述车辆表现分布函数,确定所述极值指数和所述比例参数。
13、进一步地,所述极值定理的计算公式如下:
14、
15、其中,zf=inf{y,fy(y)=1},fy(y)表示kpi的概率分布函数,fy(y)=p(y<=y);
16、ξ表示所述极值指数(extreme value index,evi);
17、σu表示所述比例参数(scale parameter);
18、z(i)=y(i)-u
19、z表示y(i)中大于所述阈值的kpi值减所述阈值得到的值;所述kpi值包括多个数值;y(i)表示所述kpi值中大于所述阈值的数值;
20、u表示阈值;
21、所述广义帕累托分布函数的计算公式如下:
22、
23、所述车辆表现分布函数计算公式如下所述:
24、gu(z)=p[y≤u+z|y>u]
25、其中,y表示逻辑场景下的kpi。
26、进一步地,根据所述极值指数和所述比例参数,计算广义帕累托分布函数的对数似然函数;
27、根据所述对数似然函数,得到极值指数估计量和比例参数估计量;
28、基于极大似然估计方法,根据所述极值指数估计量和所述比例参数估计量,确定估计分布函数。
29、进一步地,所述估计分布函数为所述极值指数的估计量和所述比例参数的估计量;
30、所述失败概率的计算公式如下:
31、
32、其中,表示为所述失败概率的估计;
33、n表示所述kpi进行的有放回抽样次数;
34、表示所述极值指数的估计量;
35、u表示阈值;
36、表示所述比例参数的估计量;
37、k表示满足条件的kpi数量。
38、第二方面,本申请实施例提供了一种基于有限泛化的失败概率估计装置,所述装置包括获取模块、第一确定模块、第二确定模块、第三确定模块、估计模块和计算模块;
39、所述获取模块用于获取车辆的运行参数,根据所述运行参数,确定kpi值;
40、所述第一确定模块用于基于四分位距方法,根据所述kpi值,确定阈值;
41、所述第二确定模块用于根据所述阈值和所述kpi值,确定样本数据集;
42、所述第三确定模块用于所述基于极值定理,根据所述样本数据集和所述阈值,确定极值指数和比例参数;
43、所述估计模块用于基于极大似然估计方法,根据所述极值指数和所述比例参数,确定估计分布函数;
44、所述计算模块用于根据所述估计分布函数,计算失败概率。
45、进一步地,所述装置还包括:第四确定模块;
46、所述第四确定模块用于基于1.5倍四分位距方法,对所述kpi值进行排序,计算所述kpi值的上四分位数和下四分位数;基于1.5倍四分位距方法,根据所述上四分位数和所述下四分位数,确定所述阈值。
47、进一步地,所述装置还包括:第五确定模块;
48、所述第五确定模块用于根据所述样本数据集和所述阈值,构建广义帕累托分布函数和车辆表现分布函数;基于极值定理,根据所述广义帕累托分布函数和所述车辆表现分布函数,确定所述极值指数和所述比例参数。
49、第三方面,本申请实施例提供了一种存储介质,包括:
50、用于存储计算机可执行指令,所述计算机可执行指令在被执行时实现第一方面中任一项所述失败概率估计方法的步骤。
51、与现有技术相比,本申请至少能实现以下技术效果:
52、本申请能够利用四分位距方法确定阈值,从而保证选取的样本数据集趋近于0且足够多。由于现实场景中kpi存在不确定性,且kpi值大多都是安全场景下的数据,现有技术无法利用安全数据计算其失败概率,为了匹配数据趋近于0的特点,利用极值定理,确定极值指数和比例参数的近似分布。再利用极大似然估计方法对极值指数和比例参数进行参数估计,从而保证失败概率估计的准确性。再根据估计分布函数计算其失败概率,解决了现有数据中没有故障数据时,失败概率难以估计且准确性较低和效率较低的问题,从而降低自动驾驶的风险,保证交通安全。
技术特征:
1.一种基于有限泛化的失败概率估计方法,其特征在于,包括:
2.根据权利要求1所述方法,其特征在于,
3.根据权利要求1所述方法,其特征在于,
4.根据权利要求3所述方法,其特征在于,
5.根据权利要求1所述方法,其特征在于,
6.根据权利要求1所述方法,其特征在于,
7.一种基于有限泛化的失败概率估计装置,其特征在于,所述装置包括获取模块、第一确定模块、第二确定模块、第三确定模块、估计模块和计算模块;
8.根据权利要求7所述装置,其特征在于,所述装置还包括:第四确定模块;
9.根据权利要求7所述装置,其特征在于,所述装置还包括:第五确定模块;
10.一种存储介质,其特征在于,包括:
技术总结
本说明书实施例提供了一种基于有限泛化的失败概率估计方法、装置及存储介质,其中,方法包括:获取车辆的运行参数,根据所述运行参数,确定kpi值;基于四分位距方法,根据所述kpi值,确定阈值;根据所述阈值和所述kpi值,确定样本数据集;基于极值定理,根据所述样本数据集和所述阈值,确定极值指数和比例参数;基于极大似然估计方法,根据所述极值指数和所述比例参数,确定估计分布函数;根据所述估计分布函数,计算失败概率。以解决部分场景下自动驾驶时只有安全数据或只有少量失败数据时,其计算的失败概率准确度较低和效率较低的问题。
技术研发人员:何丰,刘梦,姚尚辰,杨强,药君威
受保护的技术使用者:北京赛目科技股份有限公司
技术研发日:
技术公布日:2024/8/20
- 还没有人留言评论。精彩留言会获得点赞!