一种新型的机加工柔性排产方法与流程
本发明涉及智能制造领域,尤其涉及一种新型的机加工柔性排产方法。
背景技术:
1、车间生产排产调度是柔性制造生产计划的关键技术和核心内容,柔性机加工车间属于典型的离散加工行业,其排产问题可以描述为:现在有a种产品共n个待加工工件,需要在k台机器上加工,每个工件有对应的加工时间,在一定的约束条件下使得所有工件的加工时间最短;
2、智能排产,其本质是一个车间调度问题,即通过算法计算寻找一种适应车间约束的最优生产排班和资源分配方案,在实际生产过程中,它往往受到工序、时间、机器和工件的约束,已成为这个领域中被证实的一种典型的np难题,目前多采用多种智能优化算法来解决这一难题,例如遗传算法、粒子群算法等,但现有的一些算法仅可解决一些最基本的作业空间调度问题,对于一些复杂的加工场景还需要人工进行参与协助,为此,我们提出一种新型的机加工柔性排产方法来解决上述问题。
技术实现思路
1、本发明的目的在于克服现有技术的不足以提供一种新型的机加工柔性排产方法,该技术能够在复杂的调度环境中得到一个优秀的排产计划,并且所提出方法的性能随着作业数量的增加而提高。
2、为了实现上述目的,本发明采用了如下技术方案:一种新型的机加工柔性排产方法,包括以下步骤:
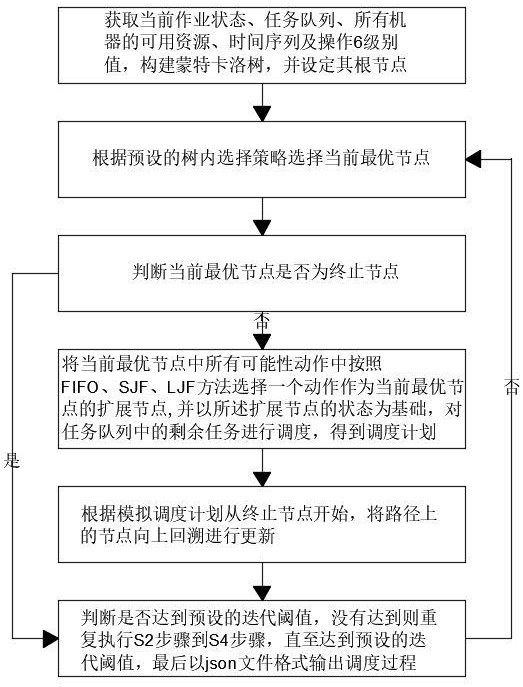
3、s1、获取当前作业状态、任务队列、所有机器的可用资源、时间序列及操作6级别值,构建蒙特卡洛树,并设定其根节点;
4、s2、根据预设的树内选择策略选择当前最优节点;
5、s3、将当前最优节点中所有可能性动作中按照fifo、sjf、ljf方法选择一个动作作为当前最优节点的扩展节点并以所述扩展节点的状态为基础,对任务队列中的剩余任务进行调度,得到调度计划;
6、s4、据模拟调度计划从终止节点开始,将路径上的节点向上回溯进行更新;
7、s5、判断是否达到预设的迭代阈值。
8、优选的,s1中,用户输入当前的任务队列、可用机器及每个任务的时间序列信息,其中我们加入级别值这一参数作为额外的顺序约束,每个工件的工序顺序必须按照级别值执行,级别值高的先执行。
9、优选的,s2-1、树内选择策略是指从根节点开始,利用uct算法,选择uct值最大的节点最为当前的最优节点。
10、优选的,s3-1、建立一个新的节点作为当前节点的子节点,并进行节点的模拟,从所属新节点开始,进行模拟动作项选择及作业调度。
11、优选的,s3-1-1、在此步骤中,用三种常见的调度方式:fifo、sjf、ljf作为动作项,取代传统蒙特卡洛树搜索算法中随机选择子节点的方式,以提高训练效率。
12、优选的,s3-1-1-1、从任务队列中,根据这些动作,从可扩展叶节点中选择一个新的子节点,上述三种不同的动作项对同一作业的各种操作有着不同的影响,最终,最佳动作项将通过比较单个作业的所有操作的总体处理时间来确定。
13、优选的,s4-1、从当前新扩展节点开始,沿着与节点选择时相反的路径,向上更新所有结点的节点价值q和访问次数n,直至根节点。
14、优选的,s5-1、重复执行s2到s4步骤,直至达到预设的迭代阈值,最后以json文件格式输出调度过程。
15、与现有技术相比,本发明的有益效果为:
16、本发明克服了现有技术的缺点,更适用于复杂的排产环境,在生产实际中,排产的工件状态、机床状态等信息都是随时间变化而变化的,蒙特卡洛树搜索可以在动态的环境中做出较好的调度权衡,并且可以得出具有启发性的解决方案,相较于q-learning算法利用表格来记录状态-动作对的方法,蒙特卡洛树搜索利用树结构来保存当前的系统状态与动作,并增加了随机选择动作的策略,更适用于动态变化的车间环境,解决了复杂动态环境下的机加工排产问题。
17、本发明对传统的蒙特卡洛树算法进行改进,将蒙特卡洛树与静态的调度算法——先进先出算法(fifo)、最短作业优先算法(sjf)、最长作业优先算法(ljf)相结合,在选择下一步的动作时我们将蒙特卡洛树的随机动作选择策略改为在三种静态调度算法中进行下一步动作选择,大大降低了时间复杂度,更加符合当下高效的机加工排产需求
技术特征:
1.一种新型的机加工柔性排产方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种新型的机加工柔性排产方法,其特征在于,s1中,用户输入当前的任务队列、可用机器及每个任务的时间序列信息,其中我们加入级别值这一参数作为额外的顺序约束,每个工件的工序顺序必须按照级别值执行,级别值高的先执行。
3.根据权利要求1所述的一种新型的机加工柔性排产方法,其特征在于,s2-1、树内选择策略是指从根节点开始,利用uct算法,选择uct值最大的节点最为当前的最优节点。
4.根据权利要求1所述的一种新型的机加工柔性排产方法,其特征在于,s3-1、建立一个新的节点作为当前节点的子节点,并进行节点的模拟,从所属新节点开始,进行模拟动作项选择及作业调度。
5.根据权利要求4所述的一种新型的机加工柔性排产方法,其特征在于,s3-1-1、在此步骤中,用三种常见的调度方式:fifo、sjf、ljf作为动作项,取代传统蒙特卡洛树搜索算法中随机选择子节点的方式,以提高训练效率。
6.根据权利要求5所述的一种新型的机加工柔性排产方法,其特征在于,s3-1-1-1、从任务队列中,根据这些动作,从可扩展叶节点中选择一个新的子节点,上述三种不同的动作项对同一作业的各种操作有着不同的影响,最终,最佳动作项将通过比较单个作业的所有操作的总体处理时间来确定。
7.根据权利要求1所述的一种新型的机加工柔性排产方法,其特征在于,s4-1、从当前新扩展节点开始,沿着与节点选择时相反的路径,向上更新所有结点的节点价值q和访问次数n,直至根节点。
8.根据权利要求1所述的一种新型的机加工柔性排产方法,其特征在于,s5-1、重复执行s2到s4步骤,直至达到预设的迭代阈值,最后以json文件格式输出调度过程。
技术总结
本发明公开了一种新型的机加工柔性排产方法,包括以下步骤:S1、获取当前作业状态、任务队列、所有机器的可用资源、时间序列及操作6级别值,构建蒙特卡洛树,并设定其根节点;S2、根据预设的树内选择策略选择当前最优节点;S3、将当前最优节点中所有可能性动作中按照FIFO、SJF、LJF方法选择一个动作作为当前最优节点的扩展节点并以所述扩展节点的状态为基础,对任务队列中的剩余任务进行调度,得到调度计划;S4、据模拟调度计划从终止节点开始,将路径上的节点向上回溯进行更新;S5、判断是否达到预设的迭代阈值;本方法适用于复杂的排产环境,适用于动态变化的车间环境,解决了复杂动态环境下的机加工排产问题。
技术研发人员:刘壮,史春平
受保护的技术使用者:刘壮
技术研发日:
技术公布日:2024/11/4
- 还没有人留言评论。精彩留言会获得点赞!