基于最小二乘法校正不通视控制点的方法与流程
本发明属于工程测量,尤其是涉及一种基于最小二乘法校正不通视控制点的方法。
背景技术:
1、测设测量控制网是工程建设中一项基础工作,其目的是为工程提供统一的坐标参考框架,用于地形测绘、施工放样、变形监测等。
2、施工控制网通常设置多个控制点数,为避免其受到现场大型机械、车辆碾压等施工干扰而发生破坏,建成后的控制网须立即进行围护。而其一旦遭到破坏须及时进行修复并校正坐标值。通常采用直接测量法或闭合导线法或附合导线法对该控制点进行校正,采用直接测量法需要将全站仪架设到临近其它控制点上,建站后采用“坐标测量”、“后方交会法”等方法,直接测取待校正点的坐标值,从而完成校正;采用闭合导线法或附合导线法时,现场控制点间也必须具备通视条件;但是项目初期尤其是地基工程施工过程中,会形成很多土堆及其它物料堆体等,这些障碍物的遮挡使得已建好的控制网点间经常会出现互不通视的情况,导致校正受破坏的控制点不能采用常规测量方法来完成校正。
技术实现思路
1、为解决上述技术问题,本发明提供一种基于最小二乘法校正不通视控制点的方法,测量过程灵活实用、省时快捷、易操作,准确率高。
2、本发明采用的技术方案是:基于最小二乘法校正不通视控制点的方法,包括以下步骤:
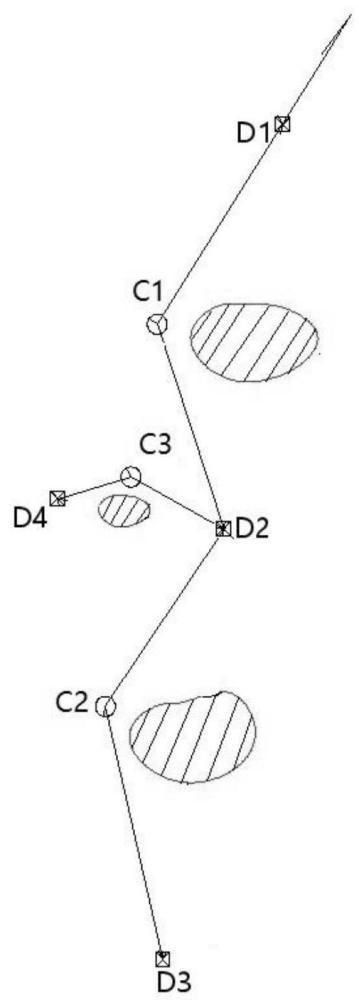
3、布设引点,使已知控制点、所述引点和未知控制点相连后形成至少两条导线;
4、测量相邻两点之间的距离和相邻两条边之间的转折角;
5、设定起始点和起始方向,建立假定坐标系,依次计算所有点在所述假定坐标系中的坐标值;
6、建立基于测量误差的所述假定坐标系与控制网坐标系的坐标值之间的数学关系模型;
7、将所述数学关系模型转换为矩阵表达式;
8、基于最小二乘法求取所述数学关系模型中的未知参数;
9、计算所述未知控制点的校正坐标值;
10、验算计算结果的准确性。
11、进一步地,所述引点设置于两个不通视的所述已知控制点之间以及不通视的所述已知控制点与所述未知控制点之间。
12、进一步地,所述导线分别包括至少两个所述引点、至少两个所述已知控制点和所述未知控制点;所述导线相邻两点之间能够通视。
13、进一步地,所述测量相邻两点之间的距离和相邻两条边之间的转折角包括;采用左右角测量法测量所述转折角,两次测量值之间的差值绝对值不大于2″;采用往返测量法测量所述相邻两点之间的距离,两次测量值之间的差值绝对值不大于1mm。
14、进一步地,所述起始点为其中一个所述导线的端点,所述起始方向为所述起始点与相邻的所述引点的之间的连线所在的方向。
15、进一步地,已知所述已知控制点di在所述控制网坐标系中的坐标为(xi,yi),在假定坐标系中的坐标为(ai,bi),测量误差为vxi、vyi,所述数学关系模型为:
16、vxi=a0+ai×m-bi×n-xi;
17、vyi=b0+bi×m+ai×n-yi;
18、其中a0和b0为平移参数,m和n为尺度比及旋转因子之积,a0、b0、m和n均为所述未知参数。
19、进一步地,所述矩阵表达式为:
20、
21、进一步地,所述基于最小二乘法求取所述数学关系模型中的未知参数,具体包括:
22、将所述已知控制点在所述假定坐标系和所述控制网坐标系中的坐标值分别填入所述矩阵表达式中;
23、基于最小二乘原则中关于未知函数的要求:vtv=min,采用求解函数自由极值的方法,进行矩阵运算,计算出a0、b0、m和n。
24、进一步地,所述计算所述未知控制点的校正坐标值包括:
25、将a0、b0、m和n代入基于平面坐标体系的所述假定坐标系与控制网坐标系的坐标值之间的理论数学关系模型,所述理论数学关系模型为:
26、xt′=a0+at×m-bt×n;
27、yt′=b0+bt×m+at×n;
28、其中an和bn为所述待测量dt在所述假定坐标系中的坐标;
29、求得所述未知控制点的所述校正坐标为(xt′,yt′)。
30、进一步地,所述验算计算结果的准确性,包括计算至少一个所述已知控制点的所述校正坐标与所述控制网坐标系中的坐标之间的差值,判断是否符合误差要求。
31、本发明具有的优点和积极效果是:本发明通过合理设置引点构建两条导线,实现了未知控制点与已知控制点的拓扑关联;同时增加了多余观测数,使得最终测量成果精度及可靠性更高;测量过程灵活实用、省时快捷、易操作,只需测边长及转折角,即可基于最小二乘法快速得出未知控制点的校正坐标。
技术特征:
1.基于最小二乘法校正不通视控制点的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于最小二乘法校正不通视控制点的方法,其特征在于:所述引点设置于两个不通视的所述已知控制点之间以及不通视的所述已知控制点与所述未知控制点之间。
3.根据权利要求1或2所述的基于最小二乘法校正不通视控制点的方法,其特征在于:
4.根据权利要求1所述的基于最小二乘法校正不通视控制点的方法,其特征在于:所述测量相邻两点之间的距离和相邻两条边之间的转折角包括;采用左右角测量法测量所述转折角,两次测量值之间的差值绝对值不大于2″;采用往返测量法测量所述相邻两点之间的距离,两次测量值之间的差值绝对值不大于1mm。
5.根据权利要求1所述的基于最小二乘法校正不通视控制点的方法,其特征在于:所述起始点为其中一个所述导线的端点,所述起始方向为所述起始点与相邻的所述引点的之间的连线所在的方向。
6.根据权利要求5所述的基于最小二乘法校正不通视控制点的方法,其特征在于:已知所述已知控制点di在所述控制网坐标系中的坐标为(xi,yi),在假定坐标系中的坐标为(ai,bi),测量误差为vxi、vyi,所述数学关系模型为:
7.根据权利要求6所述的基于最小二乘法校正不通视控制点的方法,其特征在于:所述矩阵表达式为:
8.根据权利要求7所述的基于最小二乘法校正不通视控制点的方法,其特征在于:所述基于最小二乘法求取所述数学关系模型中的未知参数,具体包括:
9.根据权利要求8所述的基于最小二乘法校正不通视控制点的方法,其特征在于:所述计算所述未知控制点的校正坐标值包括:
10.根据权利要求9所述的基于最小二乘法校正不通视控制点的方法,其特征在于:所述验算计算结果的准确性,包括计算至少一个所述已知控制点的所述校正坐标与所述控制网坐标系中的坐标之间的差值,判断是否符合误差要求。
技术总结
本发明提供一种基于最小二乘法校正不通视控制点的方法,用于工程测量技术领域;包括布设引点,使已知控制点、引点和未知控制点相连后形成至少两条导线;测量相邻两点之间的距离和相邻两条边之间的转折角;建立假定坐标系;建立基于测量误差的所述假定坐标系与控制网坐标系的坐标值之间的数学关系模型;基于最小二乘法求取数学关系模型中的未知参数;计算未知控制点的校正坐标值。本发明的通过合理设置引点构建两条导线,实现了未知控制点与已知控制点的拓扑关联;同时增加了多余观测数,使得最终测量成果精度及可靠性更高;测量过程灵活实用、省时快捷、易操作,只需测边长及转折角,即可基于最小二乘法快速得出未知控制点的校正坐标。
技术研发人员:杜日中,张伟,张振华,周宏图,郝信博
受保护的技术使用者:中冶天工集团有限公司
技术研发日:
技术公布日:2024/9/12
- 还没有人留言评论。精彩留言会获得点赞!