绞车收放缆过程的多目标优化方法和装置与流程
本公开涉及计算机,尤其涉及绞车收放缆过程的多目标优化方法和装置。
背景技术:
1、由于海洋储存了大量能量,使得液压绞车在海上作业中得到广泛应用。而海上作业的复杂波浪条件、收放缆速度等因素,均会影响液压绞车在运行过程中的安全性和工作效率。
2、相关技术中,没有综合考虑这些影响因素对液压绞车的收放缆过程的影响,从而降低了液压绞车在运行过程中的安全性和工作效率。
技术实现思路
1、有鉴于此,本公开实施例提供了一种绞车收放缆过程的多目标优化方法和装置,以解决相关技术中存在的问题。
2、本公开实施例的第一方面,提供了一种绞车收放缆过程的多目标优化方法,包括:
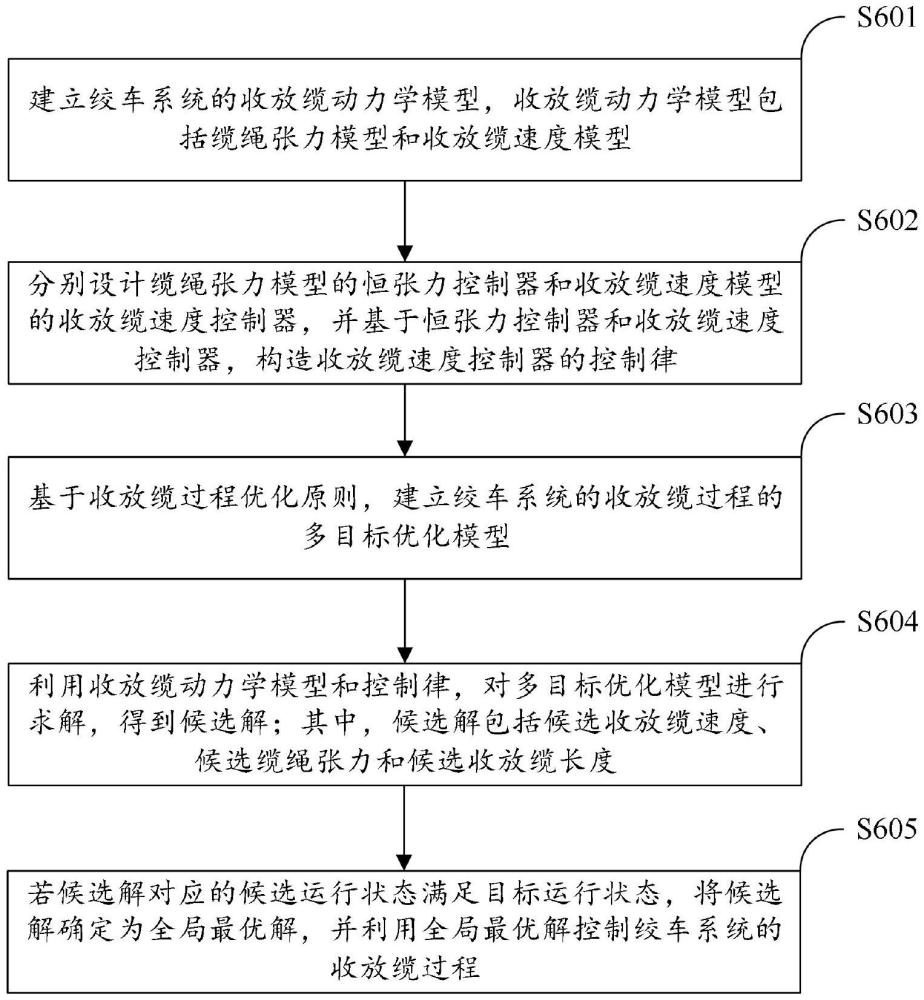
3、建立绞车系统的收放缆动力学模型,所述收放缆动力学模型包括缆绳张力模型和收放缆速度模型;
4、分别设计所述缆绳张力模型的恒张力控制器和所述收放缆速度模型的收放缆速度控制器,并基于所述恒张力控制器和所述收放缆速度控制器,构造所述收放缆速度控制器的控制律;
5、基于收放缆过程优化原则,建立所述绞车系统的收放缆过程的多目标优化模型;
6、利用所述收放缆动力学模型和所述控制律,对所述多目标优化模型进行求解,得到候选解;其中,所述候选解包括候选收放缆速度、候选缆绳张力和候选收放缆长度;
7、若所述候选解对应的候选运行状态满足目标运行状态,将所述候选解确定为全局最优解,并利用所述全局最优解控制所述绞车系统的收放缆过程。
8、本公开实施例的第二方面,提供了一种绞车收放缆过程的多目标优化装置,包括:
9、构建模块,用于建立绞车系统的收放缆动力学模型,所述收放缆动力学模型包括缆绳张力模型和收放缆速度模型;
10、所述构建模块还用于分别设计所述缆绳张力模型的恒张力控制器和所述收放缆速度模型的收放缆速度控制器,并基于所述恒张力控制器和所述收放缆速度控制器,构造所述收放缆速度控制器的控制律;
11、所述构建模块还用于基于收放缆过程优化原则,建立所述绞车系统的收放缆过程的多目标优化模型;
12、求解模块,用于利用所述收放缆动力学模型和所述控制律,对所述多目标优化模型进行求解,得到候选解;其中,所述候选解包括候选收放缆速度、候选缆绳张力和候选收放缆长度;
13、处理模块,用于若所述候选解对应的候选运行状态满足目标运行状态,将所述候选解确定为全局最优解,并利用所述全局最优解控制所述绞车系统的收放缆过程。
14、本公开实施例的第三方面,提供了一种电子设备,包括:至少一个处理器;用于存储至少一个处理器可执行指令的存储器;其中,至少一个处理器用于执行指令,以实现上述方法的步骤。
15、本公开实施例的第四方面,提供了一种计算机可读存储介质,当计算机可读存储介质中的指令由电子设备的处理器执行时,使得电子设备能够执行上述方法的步骤。
16、本公开实施例采用的上述至少一个技术方案能够达到以下有益效果:通过建立绞车系统的收放缆动力学模型,收放缆动力学模型包括缆绳张力模型和收放缆速度模型;分别设计缆绳张力模型的恒张力控制器和收放缆速度模型的收放缆速度控制器,并基于恒张力控制器和收放缆速度控制器,构造收放缆速度控制器的控制律;基于收放缆过程优化原则,建立绞车系统的收放缆过程的多目标优化模型;利用收放缆动力学模型和控制律,对多目标优化模型进行求解,得到候选解;其中,候选解包括候选收放缆速度、候选缆绳张力和候选收放缆长度;若候选解对应的候选运行状态满足目标运行状态,将候选解确定为全局最优解,并利用全局最优解控制绞车系统的收放缆过程,能够综合考虑海上作业的复杂波浪条件、收放缆速度等因素,对绞车系统的收放缆过程进行优化,提高了绞车系统在运行过程中的安全性和工作效率。
技术特征:
1.一种绞车收放缆过程的多目标优化方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述缆绳张力模型用于描述负载的重量、负载的加速度和波浪干扰对所述绞车系统的运行状态的影响,所述收放缆速度模型用于描述收放缆绳的加速度对所述绞车系统的运行状态的影响;
3.根据权利要求1所述的方法,其特征在于,所述绞车系统至少包括液压马达,所述恒张力控制器用于通过控制所述液压马达的进出口压差,保持所述绞车系统的缆绳张力恒定;所述收放缆速度控制器用于通过控制所述液压马达的流量,控制所述绞车系统的收放缆速度。
4.根据权利要求1所述的方法,其特征在于,所述收放缆速度控制器的控制律包括自适应控制律和鲁棒控制律;
5.根据权利要求1所述的方法,其特征在于,所述收放缆过程优化原则包括缩短收放缆过程的时间和减小缆绳张力的波动;所述多目标优化模型通过下述公式进行表示:
6.根据权利要求1~5中任一项所述的方法,其特征在于,所述若所述候选解对应的候选运行状态满足目标运行状态,将所述候选解确定为全局最优解,包括:
7.根据权利要求6所述的方法,其特征在于,所述方法还包括:
8.一种绞车收放缆过程的多目标优化装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,当所述计算机可读存储介质中的指令由电子设备的处理器执行时,使得所述电子设备能够执行如权利要求1~7中任一项所述的方法的步骤。
技术总结
本公开涉及绞车收放缆过程的多目标优化方法和装置。该方法包括:建立绞车系统的收放缆动力学模型,收放缆动力学模型包括缆绳张力模型和收放缆速度模型;分别设计缆绳张力模型的恒张力控制器和收放缆速度模型的收放缆速度控制器,构造收放缆速度控制器的控制律;建立多目标优化模型;利用收放缆动力学模型和控制律对多目标优化模型进行求解,得到候选解;若候选解对应的候选运行状态满足目标运行状态,将候选解确定为全局最优解,并利用全局最优解控制绞车系统的收放缆过程。本公开能够综合考虑海上作业的复杂波浪条件、收放缆速度等因素,对绞车系统的收放缆过程进行优化,提高了绞车系统的安全性和工作效率。
技术研发人员:刘迪,段小川,王少萍,尚耀星,石健
受保护的技术使用者:天目山实验室
技术研发日:
技术公布日:2024/9/9
- 还没有人留言评论。精彩留言会获得点赞!