一种用于行为模式识别的传感器特征优选方法
本发明涉及行为导航定位领域,特别涉及一种用于行为模式识别的传感器特征优选方法。
背景技术:
1、在pdr行人定位算法中,不论是基于穿戴式还是基于智能终端的定位方法中,行人的运动模式对于定位算法中定位手段、融合算法的选择以及失效检测都至关重要。不同运动行为下,传感器的特性会有所不同,因此需要对不同的行为模式进行识别,针对不同的行为模式选择不同定位算法、不同的组合模型、不同的误差估计方法、不同的融合数据源,以获得高精度的行人定位结果。
2、行人行为模式识别主要基于各类传感器,如加速度计、陀螺仪、重力计、气压计等,通过采集传感器数据、提取各类特征,对特征进行分类,再采用各类方法进行运动模式的识别。而利用传感器数据进行行为模式识别对于特征依赖性强,选取哪些特征作为算法的输入,直接影响识别的准确性。因此,如何选取用于行为模式识别的特征也是需要考虑的问题。常用的sc-hmm算法先利用谱聚类对采集的传感器数据形成的活动序列进行聚类等无监督方式学习,再利用hmm对分类结果进行监督学习,最后得到想要的结果。但此方法在谱聚类学习阶段,需要采集大量的样本数据,在hmm学习阶段对特征的选择对最终结果很大,即结果对特征选取依赖性高,整个算法效率不高。另外,在数据流环境下自动更新以适应实时数据流的算法,该方法提过将三轴加速度计采集到的合成加速度数据集合看做物质,来提取物质的物理特征并训练这些物理特征用于投票分类,然后再通过增量学习来更新样本特征值,使其逐渐趋向于用户的行为习惯,从而达到更高的识别率。此方法虽然实现了自适应特征提取,但该方法仅基于单一传感器加速计数据,对于可用的多传感器不适用,其没有对多传感器数据有效利用。
技术实现思路
1、为解决上述技术问题,本发明提供了一种用于行为模式识别的传感器特征优选方法,基于皮尔逊(pearson)相关系数来选取用于行为模式识别的最优特征组合,可有效提高识别效率和准确度。
2、为达到上述目的,本发明采用的技术方案如下:
3、一种用于行为模式识别的传感器特征优选方法,包括以下几个步骤:
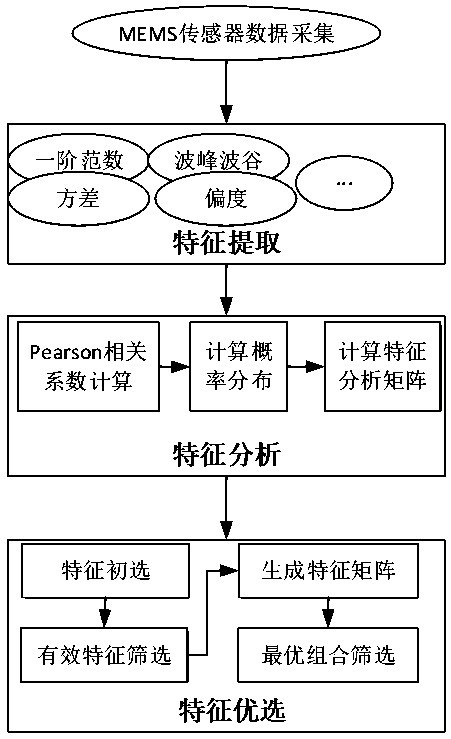
4、步骤1,对微机械电子测量系统mems传感器数据进行特征提取;其中,所述对mems传感器数据进行特征提取包括采集mems传感器原始测量数据,提取特征,用于特征分析;
5、步骤2,利用皮尔逊pearson相关系数进行特征分析,生成特征分析矩阵;所述特征分析是分析在相同行为模式下关联性高、在不同行为模式下关联性低、受外界条件影响小的特征;所述利用皮尔逊相关系数进行特征分析,生成特征分析矩阵包括,计算不同行为模式下同一种特征的皮尔逊相关系数,并计算皮尔逊相关系数的概率分布,将所述概率分布进行归一化之后组成特征分析矩阵;
6、步骤3,依据特征矩阵进行特征优选,生成最优特征组合;所述特征优选是根据所述特征分析的结果,提取出用于行为模式识别的最优特征组合;所述依据特征分析矩阵进行特征优选,生成最优特征组合包括,利用归一化相关系数对特征分析矩阵进行初筛,然后提取系数矩阵,利用系数矩阵筛选出有效特征组成特征矩阵,依据特征矩阵选出用于行为模式识别的最优特征组合。
7、本发明的有益效果:
8、(1)利用本发明可以快速有效的对传感器特征进行最优选择;
9、(2)基于传感器特征优选方法进行行为模式识别特征选择,可有效提高识别效率和准确度;
10、(3)利用本方法进行传感器特征筛选,可降低行为模式识别中对于特征依赖性,提高识别的准确性。
技术特征:
1.一种用于行为模式识别的传感器特征优选方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种用于行为模式识别的传感器特征优选方法,其特征在于,所述步骤1包括:
3.根据权利要求2所述的一种用于行为模式识别的传感器特征优选方法,其特征在于,所述步骤2包括:
4.根据权利要求3所述的一种用于行为模式识别的传感器特征优选方法,其特征在于,所述步骤3包括:
技术总结
本发明提供了一种用于行为模式识别的传感器特征优选方法,属于导航定位领域。所述方法包括以下几个步骤:对MEMS传感器数据进行特征提取;利用皮尔逊(Pearson)相关系数进行特征分析,生成特征分析矩阵;依据特征分析矩阵进行特征优选。其中,所述对MEMS传感器数据进行特征提取包括采集MEMS传感器原始测量数据、提取特征,用于特征分析;所述特征分析是分析在相同行为模式下关联性高、在不同行为模式下关联性低、受外界条件影响小的特征;所述特征优选是根据所述特征分析的结果,提取出用于行为模式识别的最优特征组合。所述方法降低了行为模式识别中对于特征的依赖性,提高了行为模式识别的准确性。
技术研发人员:李祥红,杨光,李亚平,张扬,李冉,周宇,徐佳佳,曲江华
受保护的技术使用者:中国科学院空天信息创新研究院
技术研发日:
技术公布日:2024/7/23
- 还没有人留言评论。精彩留言会获得点赞!