高空俯视场景下的小目标检测方法、系统、设备及介质与流程
本发明涉及目标检测,具体的,本发明应用于智慧矿山和智慧城市建设领域,特别是涉及一种高空俯视场景下的小目标检测方法、系统、设备及介质。
背景技术:
1、近年来,随着深度学习和计算机视觉技术的快速发展,智慧工地中的安全监测系统变得至关重要;尤其是在高空作业场景中,确保施工现场人员的安全是一个关键的挑战;计算机视觉技术已经被广泛应用于智慧工地、故障诊断、动作识别等领域;基于图像采集设备和目标检测算法的智能监测系统已经在多项任务中取得了成功;然而,在高空俯视场景下的小目标检测仍面临许多挑战。
2、比如,高空作业场景中,使用摄像头对地面上的人员进行检测是一项关键任务;与传统的大目标和中目标检测相比,高空俯视场景下的小目标检测面临更大的挑战,包括小尺寸的被检测对象、低分辨率、少量的信息、样本不均衡、对位置精度要求高、识别效率低以及复杂的检测背景等问题;传统的目标检测模型很难在这种场景下达到满意的检测效果。
3、现有技术中所采用的目标检测算法主要分为一阶段方法和两阶段方法。
4、两阶段方法,如r-cnn和fast r-cnn,首先生成候选框,然后识别框内的物体。这些方法具有高准确度和灵活性,但计算复杂度高,不适用于小目标检测,特别是在高空俯视场景下,由于图像尺度较大,计算复杂度高,容易忽略小目标的局部特征,导致检测效果不佳。
5、一阶段方法,如yolo模型,直接获取预测结果,简单高效,适用于实时检测等场景;然而,这些方法的准确度相对较低,并且对小目标的检测能力有限。
6、综上所述,无论是一阶段方法还是两阶段方法,都不适用于高空俯视场景下的小目标检测;主要原因在于对于大尺度图像的计算复杂度高,容易忽略小目标的局部特征,导致检测效果不佳。因此,针对这种特殊场景,需要进一步研究和改进目标检测算法,以提高其适用性和准确性。
技术实现思路
1、本发明的目的在于,提供一种高空俯视场景下的小目标检测方法、系统、设备及介质,进而解决现有技术中存在的上述所有问题或问题之一。
2、为解决上述技术问题,本发明的具体技术方案如下:
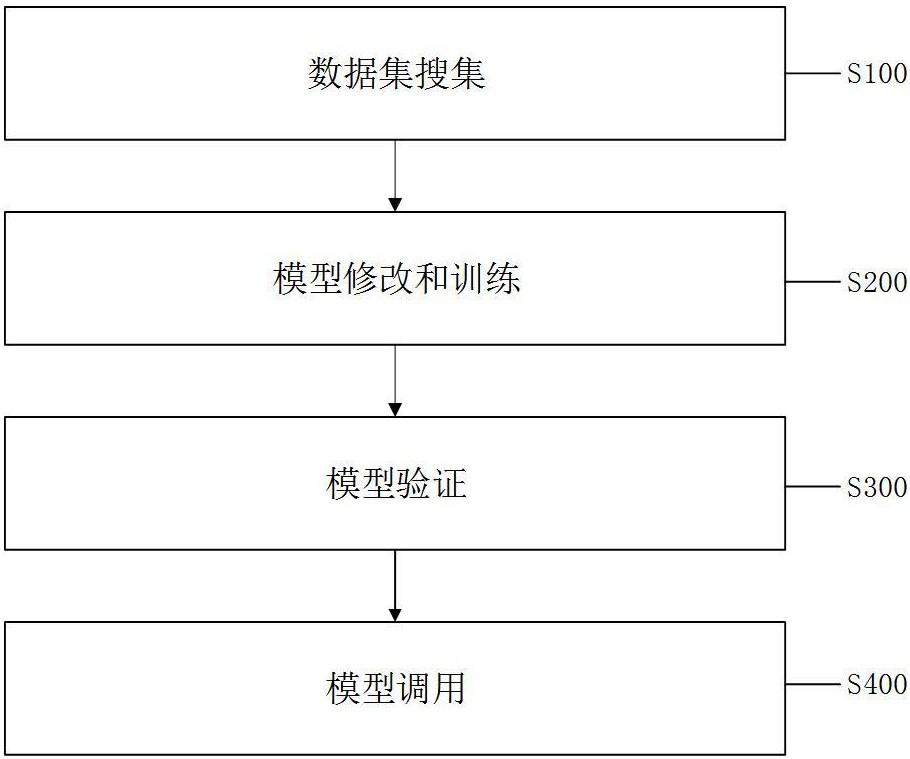
3、一方面,本发明提供一种高空俯视场景下的小目标检测方法,包括以下步骤:
4、数据集搜集:
5、将coco2017作为用于模型训练和验证的数据集;
6、模型修改和训练:
7、基于模型结构重组策略以及block模块更新策略进行模型修改和训练;
8、模型验证:
9、采用所述数据集对修改和训练后的模型进行验证;
10、模型调用:
11、调用验证后的模型执行目标检测任务。
12、作为一种改进的方案,所述模型结构重组策略,包括:
13、训练时利用多路结构;
14、推理阶段,将多个计算模块融合为单一路径模型。
15、作为一种改进的方案,所述模型结构重组策略,进一步包括:
16、采用了卷积与批归一化层的融合,将conv层与其后的bn层合并;
17、通过将conv1x1与identity转换为等效conv3x3形式,进行step1到step2的转变;
18、在step2到step3中,将多个大小相容的二维卷积核在相同输入上以相同步幅操作,产生相同分辨率输出,对输出求和,得到等效核。
19、作为一种改进的方案,所述block模块更新策略,包括:
20、将fasternet-block模块与部分卷积模块、批归一化和修正线性单元相结合,构成新的fasternet-block块。
21、作为一种改进的方案,所述模型采用rt-detr模型。
22、作为一种改进的方案,所述block模块更新策略,进一步包括:
23、采用所述新的fasternet-block块替换所述rt-detr模型的backbone中的basicblock。
24、作为一种改进的方案,所述采用所述数据集对修改和训练后的模型进行验证,包括:
25、采用所述coco2017从精度和召回率两个角度进行修改和训练后的rt-detr模型的性能验证。
26、另一方面,本发明还提供一种高空俯视场景下的小目标检测系统,包括:
27、数据集搜集模块,用于:将coco2017作为用于模型训练和验证的数据集;
28、模型修改和训练模块,用于:基于模型结构重组策略以及block模块更新策略进行模型修改和训练;
29、模型验证模块,用于:采用所述数据集对修改和训练后的模型进行验证;
30、模型调用模块,用于:调用验证后的模型执行目标检测任务。
31、另一方面,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现所述高空俯视场景下的小目标检测方法的步骤。
32、另一方面,本发明还提供一种计算机设备,所述计算机设备包括处理器、通信接口、存储器和通信总线,其中,所述处理器,所述通信接口,所述存储器通过所述通信总线完成相互间的通信;其中:
33、所述存储器,用于存放计算机程序;
34、所述处理器,用于通过运行所述存储器上所存放的程序来执行所述高空俯视场景下的小目标检测方法的步骤。
35、本发明技术方案的有益效果是:
36、1.本发明所述的高空俯视场景下的小目标检测方法,可以实现提升rt-dert的小目标检测性能,使rt-detr能够实现端到端的目标检测,无需使用传统的目标检测方法所需的手工设计的特征提取器、锚框生成器和非极大值抑制等步骤,从而简化了目标检测模型的设计和训练过程。
37、2.本发明所述的高空俯视场景下的小目标检测系统,可以通过系统模块的相互配合,进而实现提升rt-dert的小目标检测性能,使rt-detr能够实现端到端的目标检测,无需使用传统的目标检测方法所需的手工设计的特征提取器、锚框生成器和非极大值抑制等步骤,从而简化了目标检测模型的设计和训练过程。
38、3.本发明所述的计算机可读存储介质,可以实现引导系统模块进行配合,进而实现本发明所述的高空俯视场景下的小目标检测方法,且本发明所述的计算机可读存储介质还有效提高所述高空俯视场景下的小目标检测方法的可操作性。
39、4.本发明所述的计算机设备,可以实现存储并执行所述计算机可读存储介质,进而实现本发明所述的高空俯视场景下的小目标检测方法。
技术特征:
1.一种高空俯视场景下的小目标检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的高空俯视场景下的小目标检测方法,其特征在于:
3.根据权利要求2所述的高空俯视场景下的小目标检测方法,其特征在于:
4.根据权利要求1所述的高空俯视场景下的小目标检测方法,其特征在于:
5.根据权利要求4所述的高空俯视场景下的小目标检测方法,其特征在于:
6.根据权利要求5所述的高空俯视场景下的小目标检测方法,其特征在于:
7.根据权利要求4所述的高空俯视场景下的小目标检测方法,其特征在于:
8.一种高空俯视场景下的小目标检测系统,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1~7中任一项所述高空俯视场景下的小目标检测方法的步骤。
10.一种计算机设备,其特征在于,包括处理器、通信接口、存储器和通信总线,其中,所述处理器,所述通信接口,所述存储器通过所述通信总线完成相互间的通信;其中:
技术总结
本发明公开了一种高空俯视场景下的小目标检测方法、系统、设备及介质,所述方法包括以下步骤:将COCO2017作为用于模型训练和验证的数据集;基于模型结构重组策略以及Block模块更新策略进行模型修改和训练;采用所述数据集对修改和训练后的模型进行验证;调用验证后的模型执行目标检测任务;本发明能够提升RT‑DERT的小目标检测性能,使RT‑DETR能够实现端到端的目标检测,无需使用传统的目标检测方法所需的手工设计的特征提取器、锚框生成器和非极大值抑制等步骤,从而简化了目标检测模型的设计和训练过程。
技术研发人员:于晓静,王龙晖,房兰涛
受保护的技术使用者:浪潮金融信息技术有限公司
技术研发日:
技术公布日:2024/11/18
- 还没有人留言评论。精彩留言会获得点赞!