点云数据的去噪方法、装置、存储介质及电子设备与流程
本申请涉及点云数据处理领域,具体而言,涉及一种点云数据的去噪方法、装置、存储介质及电子设备。
背景技术:
1、通过三维扫描设备获取的点云数据将不可避免地包含一定的噪声,这些噪声会增加点云的数据量,使得点云模型中的几何特征变得不明显,会影响特征提取和后期曲面重构的精度和效率。相关技术中的点云去噪方法仅采用体素滤波、统计滤波和运动滤波等单一滤波方式,导致点云数据的去噪的准确率较低。
2、针对相关技术中点云数据的去噪的准确率较低的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本申请的主要目的在于提供一种点云数据的去噪方法、装置、存储介质及电子设备,以解决相关技术中点云数据的去噪的准确率较低的问题。
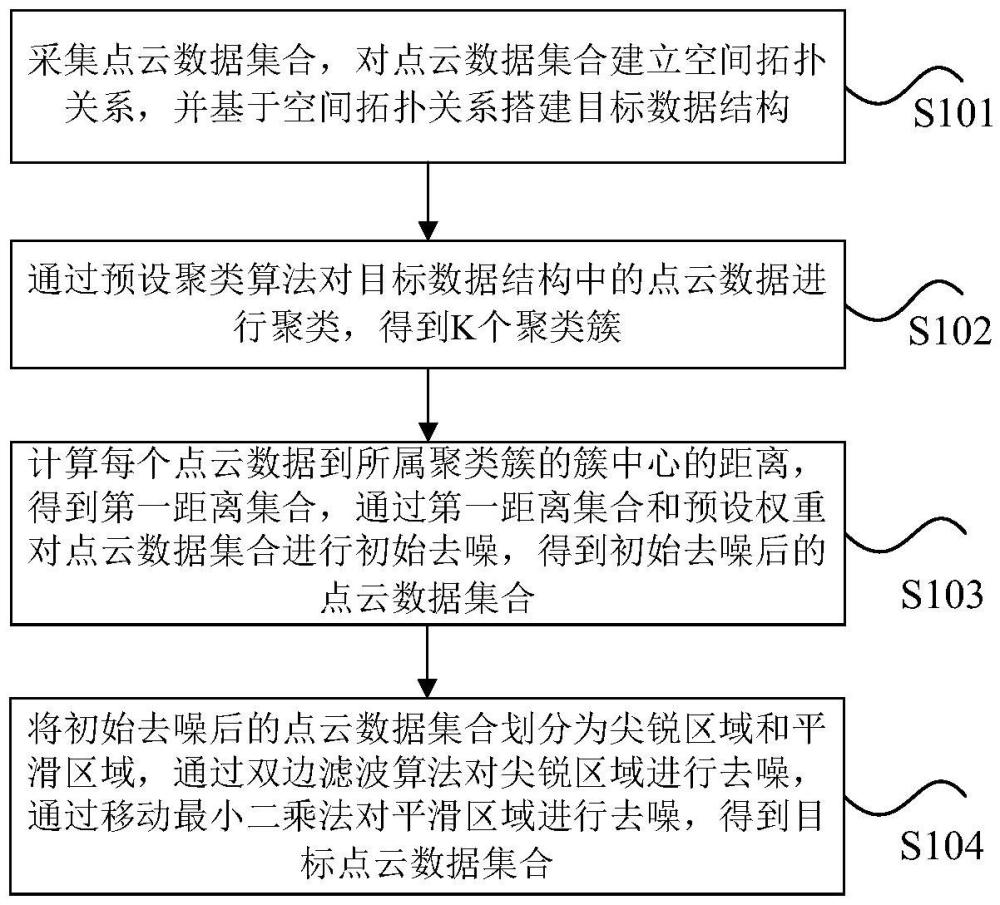
2、为了实现上述目的,根据本申请的一个方面,提供了一种点云数据的去噪方法。该方法包括:采集点云数据集合,对点云数据集合建立空间拓扑关系,并基于空间拓扑关系搭建目标数据结构,其中,目标数据结构用于在多维空间内存储点云数据集合;通过预设聚类算法对目标数据结构中的点云数据进行聚类,得到k个聚类簇,其中,k为正整数;计算每个点云数据到所属聚类簇的簇中心的距离,得到第一距离集合,通过第一距离集合和预设权重对点云数据集合进行初始去噪,得到初始去噪后的点云数据集合,其中,第一距离集合包含多个第一距离,第一距离为每个点云数据到聚类簇的簇中心的距离;将初始去噪后的点云数据集合划分为尖锐区域和平滑区域,通过双边滤波算法对尖锐区域进行去噪,通过移动最小二乘法对平滑区域进行去噪,得到目标点云数据集合。
3、可选地,通过预设聚类算法对目标数据结构中的点云数据进行聚类,得到k个聚类簇包括:从目标数据结构中确定n个目标节点,并将每个目标节点确定为初始聚类中心,对于每个点云数据,计算当前点云数据到每个初始聚类中心的距离,得到第二距离集合,其中,n为正整数,n大于k,第二距离集合包含多个第二距离,第二距离为当前点云数据到每个初始聚类中心的距离;将第二距离集合中的最小第二距离对应的初始聚类中心确定为当前点云数据的目标聚类中心,将具有同一目标聚类中心的点云数据确定为一个聚类簇,得到n个聚类簇;对n个聚类簇进行多次迭代聚类,直到n个聚类簇的簇中心与上一次聚类后的簇中心相同,得到更新后的n个聚类簇;通过预设层次聚类算法对n个聚类簇进行合并,得到k个聚类簇。
4、可选地,通过第一距离集合和预设权重对点云数据集合进行初始去噪,得到初始去噪后的点云数据集合包括:对于每个聚类簇,确定当前聚类簇中点云数据的数量,得到第一数量,并确定当前聚类簇中每个点云数据的曲率值;计算当前聚类簇中所有点云数据的第一距离的和,得到第一距离累计值;对于当前聚类簇中的每个点云数据,确定当前点云数据的预设权重,其中,预设权重大于预设比值,预设比值为当前点云数据的曲率值与平均曲率值的比值,平均曲率值为当前聚类簇中所有点云数据的曲率值的均值;计算预设权重和第一距离累计值的积,并计算积与第一数量的比值,得到第一阈值;在当前点云数据的第一距离大于第一阈值的情况下,将当前点云数据确定为噪声点,将所有噪声点从点云数据集合剔除,得到初始去噪后的点云数据集合。
5、可选地,将初始去噪后的点云数据集合划分为尖锐区域和平滑区域包括:对于初始去噪后的点云数据集合中的每个点云数据,确定当前点云数据的邻域曲面,并计算当前点云数据到邻域曲面的距离,得到第二距离;判断第二距离是否小于第一距离阈值;在第二距离小于第一距离阈值的情况下,将当前点云数据确定为平滑区域中的点云数据;在第二距离大于等于第一距离阈值的情况下,将当前点云数据确定为尖锐区域中的点云数据。
6、可选地,通过双边滤波算法对尖锐区域进行去噪包括:对于尖锐区域中的每个点云数据,确定当前点云数据的法向量,并确定当前点云数据的邻域点云数据;基于邻域点云数据和法向量确定双边滤波因子,通过双边滤波因子确定双边滤波模型;将尖锐区域中的点云数据输入双边滤波模型,得到去噪后的尖锐区域。
7、可选地,基于邻域点云数据和法向量确定双边滤波因子,通过双边滤波因子确定双边滤波模型包括:确定当前点云数据到邻域点云数据的向量,将向量输入预设滤波函数,得到双边滤波因子;计算双边滤波因子与法向量的积,并计算积与当前点云数据的和,得到双边滤波函数;基于双边滤波函数确定双边滤波模型。
8、可选地,通过移动最小二乘法对平滑区域进行去噪包括:对于平滑区域中的每个点云数据,确定当前点云数据的局部邻域平面;计算当前点云数据的每个领域点云数据到局部邻域平面的距离,得到一组第三距离;判断一组第三距离中的每个第三距离是否大于第二距离阈值;在第三距离大于第二距离阈值的情况下,将第三距离对应的邻域点云数据确定为噪声点;将所有噪声点从平滑区域剔除,得到去噪后的平滑区域。
9、为了实现上述目的,根据本申请的另一方面,提供了一种点云数据的去噪装置。该装置包括:采集单元,用于采集点云数据集合,对点云数据集合建立空间拓扑关系,并基于空间拓扑关系搭建目标数据结构,其中,目标数据结构用于在多维空间内存储点云数据集合;聚类单元,用于通过预设聚类算法对目标数据结构中的点云数据进行聚类,得到k个聚类簇,其中,k为正整数;计算单元,用于计算每个点云数据到所属聚类簇的簇中心的距离,得到第一距离集合,通过第一距离集合和预设权重对点云数据集合进行初始去噪,得到初始去噪后的点云数据集合,其中,第一距离集合包含多个第一距离,第一距离为每个点云数据到聚类簇的簇中心的距离;去噪单元,用于将初始去噪后的点云数据集合划分为尖锐区域和平滑区域,通过双边滤波算法对尖锐区域进行去噪,通过移动最小二乘法对平滑区域进行去噪,得到目标点云数据集合。
10、通过本申请,采用以下步骤:采集点云数据集合,对点云数据集合建立空间拓扑关系,并基于空间拓扑关系搭建目标数据结构,其中,目标数据结构用于在多维空间内存储点云数据集合;通过预设聚类算法对目标数据结构中的点云数据进行聚类,得到k个聚类簇,其中,k为正整数;计算每个点云数据到所属聚类簇的簇中心的距离,得到第一距离集合,通过第一距离集合和预设权重对点云数据集合进行初始去噪,得到初始去噪后的点云数据集合,其中,第一距离集合包含多个第一距离,第一距离为每个点云数据到聚类簇的簇中心的距离;将初始去噪后的点云数据集合划分为尖锐区域和平滑区域,通过双边滤波算法对尖锐区域进行去噪,通过移动最小二乘法对平滑区域进行去噪,得到目标点云数据集合,解决了相关技术中点云数据的去噪的准确率较低的问题。通过将点云数据集合存储到目标数据结构中,并通过预设聚类算法对点云数据进行聚类,基于点云数据到聚类的簇中心的距离和预设权重对点云数据集合进行初始去噪,并将初始去噪后的点云数据集合划分为尖锐区域和平滑区域,按照不同的去噪方法进行去噪,进而达到了提高点云数据的去噪的准确率的效果。
技术特征:
1.一种点云数据的去噪方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,通过预设聚类算法对所述目标数据结构中的点云数据进行聚类,得到k个聚类簇包括:
3.根据权利要求1所述的方法,其特征在于,通过所述第一距离集合和预设权重对所述点云数据集合进行初始去噪,得到初始去噪后的点云数据集合包括:
4.根据权利要求1所述的方法,其特征在于,将所述初始去噪后的点云数据集合划分为尖锐区域和平滑区域包括:
5.根据权利要求1所述的方法,其特征在于,通过双边滤波算法对所述尖锐区域进行去噪包括:
6.根据权利要求5所述的方法,其特征在于,基于所述邻域点云数据和所述法向量确定双边滤波因子,通过所述双边滤波因子确定双边滤波模型包括:
7.根据权利要求1所述的方法,其特征在于,通过移动最小二乘法对所述平滑区域进行去噪包括:
8.一种点云数据的去噪装置,其特征在于,包括:
9.一种非易失性存储介质,其特征在于,所述非易失性存储介质包括存储的程序,其中,所述程序运行时控制所述非易失性存储介质所在的设备执行权利要求1至7中任意一项所述的点云数据的去噪方法。
10.一种电子设备,其特征在于,包括一个或多个处理器和存储器,所述存储器用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现权利要求1至7中任意一项所述的点云数据的去噪方法。
技术总结
本申请公开了一种点云数据的去噪方法、装置、存储介质及电子设备。涉及点云数据处理领域,该方法包括:采集点云数据集合,对点云数据集合建立空间拓扑关系,基于空间拓扑关系搭建目标数据结构;通过预设聚类算法对目标数据结构中的点云数据进行聚类,得到K个聚类簇;计算点云数据到所属聚类簇的簇中心的距离,得到第一距离集合,通过第一距离集合和预设权重对点云数据集合进行初始去噪,得到初始去噪后的点云数据集合;将初始去噪后的点云数据集合划分为尖锐区域和平滑区域,通过双边滤波算法对尖锐区域进行去噪,通过移动最小二乘法对平滑区域进行去噪,得到目标点云数据集合。通过本申请,解决了相关技术中点云数据的去噪的准确率较低的问题。
技术研发人员:陈佳俊
受保护的技术使用者:天翼电子商务有限公司
技术研发日:
技术公布日:2024/9/23
- 还没有人留言评论。精彩留言会获得点赞!