一种用于无人化采煤工作面的截割路径规划方法与流程
本发明涉及一种用于无人化采煤工作面的截割路径规划方法。
背景技术:
1、无人化采煤工作面是指在工作面安全专家系统的保护下,通过有线或无线方式远程控制关键生产设备,监测其工况。利用采煤机的自主定位与自动导航技术、煤岩自动识别技术、液压支架电液控制技术、刮板输送机自动推移技术、工作面自动监控监测技术、井下高速双向通讯技术和计算机集中控制技术等自动完成割煤、移架、移刮板输送机和顶板支护等生产流程,动态优化作业程序,实现工作面生产过程自动化、采煤工艺智能化、工作面管理信息化以及操作的无人化,仅当设备出现故障时,维修人员才会到达工作面,从而确保高产、高效和安全生产。
2、目前,实现无人化采煤工作面的主要技术途径有两种:刨煤机综采机组和滚筒式采煤机综采机组。其中,刨煤机综采机组由刨煤机、刮板输送机和液压支架组成,适用于薄煤层或中厚偏薄煤层开采,对煤的硬度要求较低,而且只能用于地质条件变化不大的煤层。滚筒式采煤机综采机组由滚筒式采煤机、刮板输送机和液压支架组成,适用于厚煤层开采,对煤层硬度、厚度、地质条件的适应能力强。
3、截割路径规划是无人化采煤工作面的核心技术,目前的截割路径控制方式与与本发明最近似的实现方案是“采煤机记忆截割”。采煤机记忆截割过程为:首先由采煤机司机人工控制滚筒高度完成整个工作面的首次循环截割,同时记录下在工作面上采样点相应的摇臂倾角,然后采煤机转入记忆截割状态,采煤机自动跟踪相应点记录的摇臂倾角,从而实现滚筒的自动调高。如果在截割的过程中,发现滚筒高度无法跟踪实际的顶底板煤岩界面,则需要人工控制滚筒高度,同时进行轨迹记忆,然后跟踪新的轨迹,作为下一次截割时滚筒调高的工作程序。这种方法是一种同时可以人工干预的自动化操纵方式,司机可任意调整摇臂的位置而不受记忆数据限制。
4、尽管记忆截割方法回避了煤岩界面识别难题,利用顶底板的几何形状的连续性和简单的外推的推理方法,来预测采煤机前方的顶底板形状。但是记忆截割法适合于地质条件好、煤层比较平整的矿井,对于地质条件不好的采煤工作面,该方法受到了严重的限制。而且,示范性截割的准确性依赖于操作人员的工作经验,需要操作人员根据经验判断煤岩界面和矸石并调整截割路径,存在滞后性,且受到工作面恶劣环境的限制。
5、在记忆截割的过程中,如果发现滚筒高度与实际的顶底板煤岩界面不符,则需要人工调整滚筒高度,同时进行轨迹记忆,然后跟踪新的轨迹,作为下一次截割时滚筒调高的工作程序。在整个截割过程中,需要多次学习、频繁交互。
6、传统记忆截割未考虑采煤机行程和截割轨迹优化问题,因而影响生产效率。
技术实现思路
1、为了解决上述技术问题,本发明提供一种用于无人化采煤工作面的截割路径规划方法。
2、一种用于无人化采煤工作面的截割路径规划方法,包括:
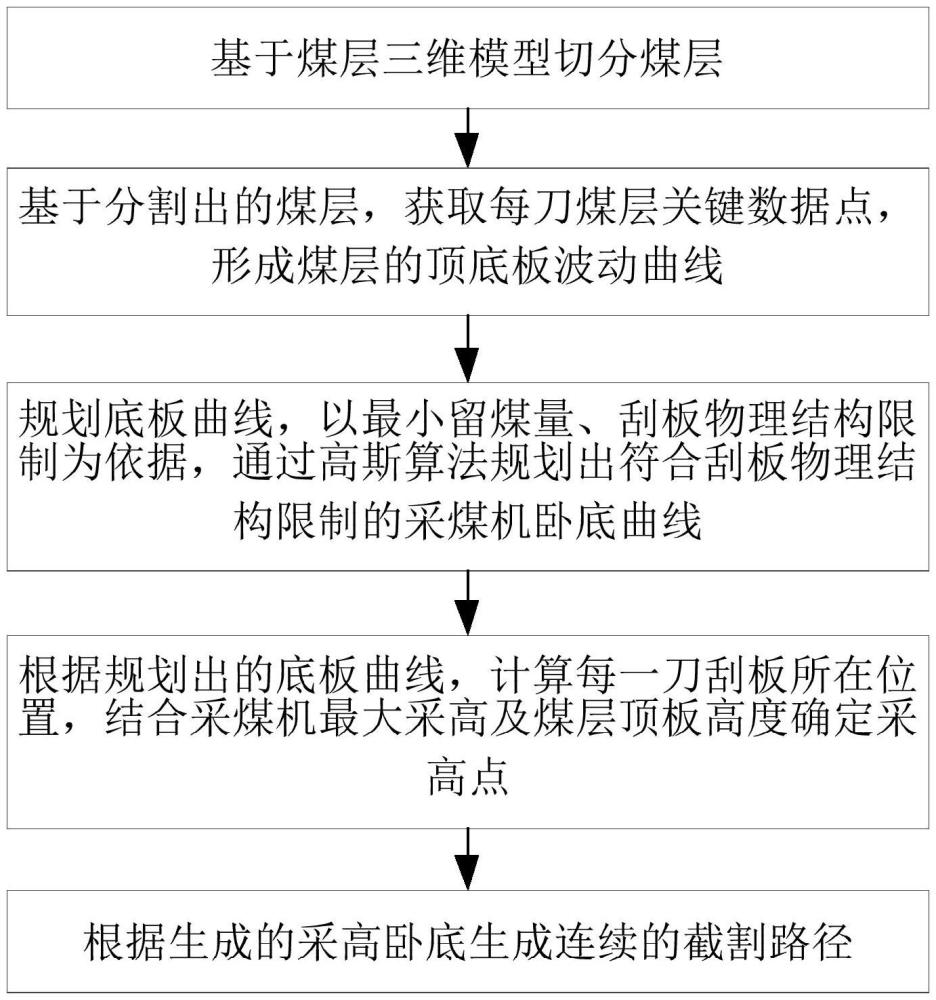
3、基于煤层三维模型切分煤层;
4、基于分割出的煤层,获取每刀煤层关键数据点,形成煤层的顶底板波动曲线;
5、规划底板曲线,以最小留煤量、刮板物理结构限制为依据,通过高斯算法规划出符合刮板物理结构限制的采煤机卧底曲线;
6、根据规划出的底板曲线,计算每一刀刮板所在位置,结合采煤机最大采高及煤层顶板高度确定采高点;
7、根据生成的采高卧底生成连续的截割路径。
8、进一步地,所述基于煤层三维模型切分煤层,包括:根据采煤机截割深度,把煤层三维模型以切眼位置为原点建立坐标系,以截割一刀时工作面推进距离为一刀,将煤层在推进方向上分为若干刀煤壁,对每一刀煤壁以设定距离分成若干段数据点。
9、进一步地,所述通过高斯算法规划出符合刮板物理结构限制的采煤机卧底曲线,包括:
10、设底板点位为a1、a2、...、an,a1为底板曲线起始点,an为末尾点,以第一个斜率变化点作为第二个斜率变化点的计算参考点,计算第一个斜率变化点和与第一个斜率变化点相邻的第二个数据点的连线的斜率k12,并以斜率k12作延长线计算出第三个数据点的坐标预测值,如果第三个数据点的坐标预测值与真实值之差的绝对值小于预设值δh,则继续计算第二个数据点和与第二个数据点相邻的第三个数据点的连线的斜率k23,并以斜率k23作延长线计算出第四个数据点的坐标预测值,依次类推,直至某一个数据点的坐标预测值与真实值之差的绝对值大于等于预设值δh,此为异常点,然后对工作面进行高斯算法进行点位拟合后重复上述操作,直至无异常点。
11、进一步地,所述根据规划出的底板曲线,计算每一刀刮板所在位置,结合采煤机最大采高及煤层顶板高度确定采高点,包括:
12、根据规划出的前两刀卧底点计算当前刀刮板位置,设前两刀对应位置卧底点为w1和w2,刮板位置为g=w2+(w2-w1)*△d,结合采煤机最大截割高度以及顶板曲线确定采高点,其中,△d为一刀煤层厚度。
13、进一步地,所述根据生成的采高卧底生成连续的截割路径,包括:
14、利用根据采煤机位置计算左右滚筒所在位置,检索左右滚筒所在煤层点位区间后,通过差值范围计算当前滚筒采高卧底。
15、本发明具有如下有益效果:本发明提供的一种用于无人化采煤工作面的截割路径规划方法具有生产效率高,无需多次、频繁交互,以及采煤功能高产、高效和安全的技术效果。
技术特征:
1.一种用于无人化采煤工作面的截割路径规划方法,其特征在于,包括:
2.根据权利要求1所述的用于无人化采煤工作面的截割路径规划方法,其特征在于,所述基于煤层三维模型切分煤层,包括:根据采煤机截割深度,把煤层三维模型以切眼位置为原点建立坐标系,以截割一刀时工作面推进距离为一刀,将煤层在推进方向上分为若干刀煤壁,对每一刀煤壁以设定距离分成若干段数据点。
3.根据权利要求1所述的用于无人化采煤工作面的截割路径规划方法,其特征在于,所述通过高斯算法规划出符合刮板物理结构限制的采煤机卧底曲线,包括:
4.根据权利要求1所述的用于无人化采煤工作面的截割路径规划方法,其特征在于,所述根据规划出的底板曲线,计算每一刀刮板所在位置,结合采煤机最大采高及煤层顶板高度确定采高点,包括:
5.根据权利要求1所述的用于无人化采煤工作面的截割路径规划方法,其特征在于,所述根据生成的采高卧底生成连续的截割路径,包括:
技术总结
本发明提供一种用于无人化采煤工作面的截割路径规划方法,基于煤层三维模型切分煤层;基于分割出的煤层,获取每刀煤层关键数据点,形成煤层的顶底板波动曲线;规划底板曲线,以最小留煤量、刮板物理结构限制为依据,通过高斯算法规划出符合刮板物理结构限制的采煤机卧底曲线;根据规划出的底板曲线,计算每一刀刮板所在位置,结合采煤机最大采高及煤层顶板高度确定采高点;根据生成的采高卧底生成连续的截割路径。本发明提供的一种用于无人化采煤工作面的截割路径规划方法具有生产效率高,无需多次、频繁交互,以及采煤功能高产、高效和安全的技术效果。
技术研发人员:佘永明,温大江,王海超,蒋海波,尹泽,王连生,王志峰,董志超,武德宏,吕晓明,彭涛,高宇,祝强
受保护的技术使用者:国能神东煤炭集团有限责任公司
技术研发日:
技术公布日:2024/10/24
- 还没有人留言评论。精彩留言会获得点赞!