一种基于改进YOLOV8网络的茶叶关键点检测方法及设备
本发明涉及计算机视觉和农业应用领域,尤其涉及一种基于改进yolov8网络的茶叶关键点检测方法及设备。
背景技术:
1、随着全球茶叶市场的快速发展,茶叶的质量和产地认证成为消费者关注的重要因素。传统的茶叶检测和认证通常依赖于人工操作,这些方法不仅耗时费力,而且存在操作误差和成本较高的问题。
2、近年来,基于深度学习的图像识别技术取得了显著进展,特别是yolov8等目标检测算法的应用逐渐成熟。这些算法通过高效的神经网络结构和大规模数据训练,能够实现对复杂场景中目标的准确识别和定位。
3、然而,传统的yolov8在茶叶关键点检测方面仍面临挑战,例如茶叶叶片的形态和结构多样,需要更精准的检测方法来区分品质和类型。此外,将这些技术应用于实际场景时,需考虑处理速度、实时性和嵌入式设备的适配性。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于改进yolov8网络的茶叶关键点检测方法及设备,用于解决传统的yolov8的精准度不足的问题。
2、本发明提供了一种基于改进yolov8网络的茶叶关键点检测方法,包括:
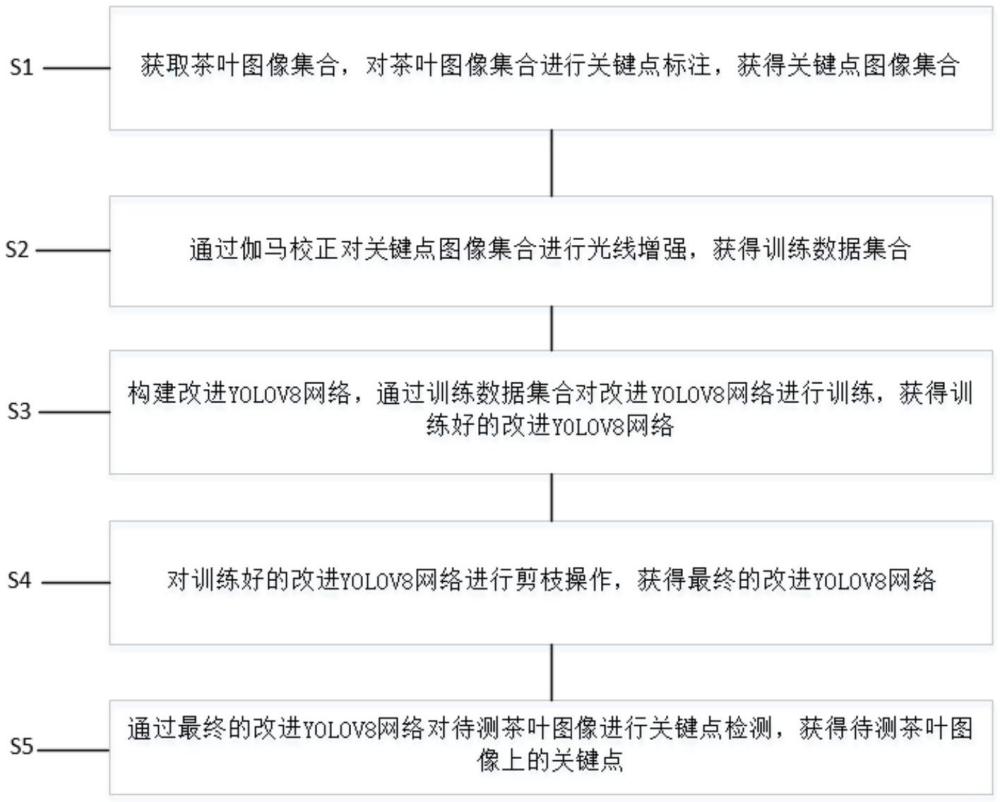
3、s1:获取茶叶图像集合,对茶叶图像集合进行关键点标注,获得关键点图像集合;
4、s2:通过伽马校正对关键点图像集合进行光线增强,获得训练数据集合;
5、s3:构建改进yolov8网络,通过训练数据集合对改进yolov8网络进行训练,获得训练好的改进yolov8网络;
6、s4:对训练好的改进yolov8网络进行剪枝操作,获得最终的改进yolov8网络;
7、s5:通过最终的改进yolov8网络对待测茶叶图像进行关键点检测,获得待测茶叶图像上的关键点。
8、优选的,步骤s1具体为:
9、s11:获取各时间段的茶叶图像组成茶叶图像集合,对茶叶图像集合进行质量筛选,获得筛选后的茶叶图像集合;
10、s12:将筛选后的茶叶图像集合中的各茶叶图像标注k个关键点,将各茶叶图像上可见度小于预设阈值的关键点剔除,获得对应的关键点图像,由所有的关键点图像构成关键点图像集合。
11、优选的,步骤s2具体为:
12、s21:提取关键点图像集合中的某一个关键点图像,通过伽马校正对该关键点图像进行不同亮度的光线增强,获得不同亮度的光线增强图像;
13、s22:重复步骤s21,对各关键点图像进行不同亮度的光线增强,由所有的光线增强图像构成训练数据集合。
14、优选的:
15、改进yolov8网络包括依次连接的backbone单元、neck单元和head单元;
16、backbone单元包括依次连接的第一conv模块、第二conv模块、第一c2f模块、第三conv模块、第二c2f模块、第四conv模块、第三c2f模块、第五conv模块、第四c2f模块和sppf模块;
17、第二c2f模块、第三c2f模块和sppf模块与neck单元连接;
18、head单元包括:第一pose模块、第二pose模块和第三pose模块;
19、neck单元与第一pose模块、第二pose模块和第三pose模块连接。
20、优选的:
21、neck单元包括依次连接的第二upsample模块、第二concat模块、第二csp模块、第一upsample模块、第一concat模块、第一csp模块、第一conv模块、第三concat模块、第三csp模块、第二conv模块、第四concat模块和第四csp模块;
22、第二c2f模块与第一concat模块连接,第三c2f模块与第二concat模块连接,sppf模块与第二upsample模块和第四concat模块连接;
23、第一csp模块与第一pose模块连接,第二csp模块与第三concat模块连接,第三csp模块与第二pose模块连接,第四csp模块与第三pose模块连接。
24、优选的,步骤s4具体为:
25、s41:通过depgraph剪枝算法计算获得训练好的改进yolov8网络中各模块之间的依赖关系,获得依赖图;
26、s42:通过依赖图的组级重要性标准确定训练好的改进yolov8网络中需要剪枝的模块,对需要剪枝的模块进行剪枝操作;
27、s43:重复步骤s41至s42直至最大迭代次数,获得最终的改进yolov8网络。
28、一种存储介质,所述存储介质存储指令及数据用于实现所述的基于改进yolov8网络的茶叶关键点检测方法。
29、一种基于改进yolov8网络的茶叶关键点检测设备,包括:处理器及存储介质;所述处理器加载并执行存储介质中的指令及数据用于实现所述的基于改进yolov8网络的茶叶关键点检测方法。
30、本发明具有以下有益效果:
31、通过将yolov8网络的neck单元中的c2f模块替换为csp模块,提高特征传播和融合效果。通过伽马校正获得的训练数据集合对yolov8网络进行训练,令yolov8网络在各种光照条件下,精确识别茶叶关键点。通过对yolov8网络中的各模块进行剪枝,在保持高检测性能的同时显著降低了计算复杂度。令最终的改进yolov8网络在提高检测关键点精度的同时,在低资源环境中能高效运行,并且易于部署。
技术特征:
1.一种基于改进yolov8网络的茶叶关键点检测方法,其特征在于,包括:
2.根据权利要求1所述的基于改进yolov8网络的茶叶关键点检测方法,其特征在于,步骤s1具体为:
3.根据权利要求1所述的基于改进yolov8网络的茶叶关键点检测方法,其特征在于,步骤s2具体为:
4.根据权利要求1所述的基于改进yolov8网络的茶叶关键点检测方法,其特征在于:
5.根据权利要求4所述的基于改进yolov8网络的茶叶关键点检测方法,其特征在于:
6.根据权利要求1所述的基于改进yolov8网络的茶叶关键点检测方法,其特征在于,步骤s4具体为:
7.一种存储介质,其特征在于:所述存储介质存储指令及数据用于实现权利要求1~6任一项所述的基于改进yolov8网络的茶叶关键点检测方法。
8.一种基于改进yolov8网络的茶叶关键点检测设备,其特征在于:包括:处理器及存储介质;所述处理器加载并执行存储介质中的指令及数据用于实现权利要求1~6任一项所述的基于改进yolov8网络的茶叶关键点检测方法。
技术总结
本发明提供一种基于改进YOLOV8网络的茶叶关键点检测方法及设备,涉及计算机视觉和农业应用领域,包括:S1:获取茶叶图像集合,对茶叶图像集合进行关键点标注,获得关键点图像集合;S2:通过伽马校正对关键点图像集合进行光线增强,获得训练数据集合;S3:构建改进YOLOV8网络,通过训练数据集合对改进YOLOV8网络进行训练,获得训练好的改进YOLOV8网络;S4:对训练好的改进YOLOV8网络进行剪枝操作,获得最终的改进YOLOV8网络;S5:通过最终的改进YOLOV8网络对待测茶叶图像进行关键点检测,获得待测茶叶图像上的关键点。本发明最终的改进YOLOV8网络在提高检测关键点精度的同时,在低资源环境中能高效运行,并且易于部署。
技术研发人员:张莉君,邱晨盼
受保护的技术使用者:中国地质大学(武汉)
技术研发日:
技术公布日:2024/9/29
- 还没有人留言评论。精彩留言会获得点赞!