基于智能视觉的鸡蛋计数器及计数方法与流程
本发明涉及图像处理,具体涉及一种基于智能视觉的鸡蛋计数器及计数方法。
背景技术:
1、在现代农业生产和食品加工行业中,鸡蛋的生产和处理是一个重要的环节。为了提高生产效率和减少人工成本,自动化鸡蛋计数技术应运而生。传统的鸡蛋计数方法主要依赖于人工操作,不仅效率低下,而且容易出错。现有常采用图像处理对鸡蛋进行计数,通过实时捕获鸡蛋在传递带上的视频图像,在特定时间抓拍图像,以确保图像清晰可用,利用yolo目标识别算法,识别出图像中的鸡蛋。最后,每识别到一个鸡蛋,计数就会进行数量累加,完成鸡蛋的计数工作。由于传送带上的鸡蛋移动速度较快,而yolo目标识别算法计算复杂度高,导致计算速度慢,存在计数精度不高的问题。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种基于智能视觉的鸡蛋计数器及计数方法解决了现有基于智能视觉的鸡蛋计数方案存在计数精度不高的问题。
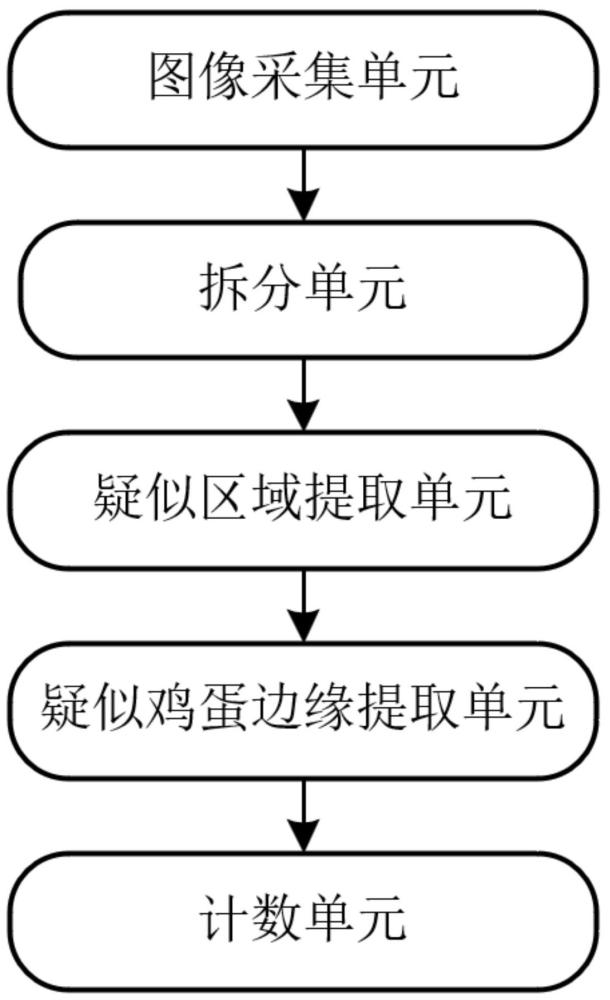
2、为了达到上述发明目的,本发明采用的技术方案为:一种基于智能视觉的鸡蛋计数器,包括:图像采集单元、拆分单元、疑似区域提取单元、疑似鸡蛋边缘提取单元和计数单元;
3、所述图像采集单元用于采集待计数区域的图像,得到初始图像;
4、所述拆分单元用于将初始图像拆分为r通道图像、g通道图像和b通道图像;
5、所述疑似区域提取单元用于根据r通道图像、g通道图像和b通道图像提取各个疑似区域;
6、所述疑似鸡蛋边缘提取单元用于提取每个疑似区域的边缘像素点,得到疑似鸡蛋边缘;
7、所述计数单元用于根据疑似鸡蛋边缘上各个像素点的位置分布,提取边缘特征向量,识别每个疑似区域是否为鸡蛋区域,根据鸡蛋区域的数量,得到鸡蛋数量。
8、进一步地,所述疑似区域提取单元包括:第一相似度计算子单元、第二相似度计算子单元、第三相似度计算子单元、疑似像素点识别子单元和分区子单元;
9、所述第一相似度计算子单元用于在r通道图像上计算每个像素点的r通道值与对比r通道值的相似度,得到r通道相似度;
10、所述第二相似度计算子单元用于在g通道图像上计算每个像素点的g通道值与对比g通道值的相似度,得到g通道相似度;
11、所述第三相似度计算子单元用于在b通道图像上计算每个像素点的b通道值与对比b通道值的相似度,得到b通道相似度;
12、所述疑似像素点识别子单元用于根据同位置的像素点的r通道相似度、g通道相似度和b通道相似度,计算像素点的平均相似度,在像素点的平均相似度大于第一相似阈值时,对应像素点为疑似像素点;
13、所述分区子单元用于根据各个疑似像素点构成的多个封闭区域,保留疑似像素点的数量在数量上限和数量下限之间的封闭区域,得到疑似区域。
14、进一步地,所述计数单元包括:矫正处理子单元、边缘特征提取子单元和识别子单元;
15、所述矫正处理子单元用于对疑似鸡蛋边缘上异常像素点坐标进行矫正处理,得到矫正处理后的疑似鸡蛋边缘;
16、所述边缘特征提取子单元用于对矫正处理后的疑似鸡蛋边缘提取边缘特征,构成边缘特征向量;
17、所述识别子单元用于根据边缘特征向量,计算边缘相似系数,在边缘相似系数大于第二相似阈值时,对应疑似区域为鸡蛋区域,根据鸡蛋区域的数量,得到鸡蛋数量。
18、进一步地,所述矫正处理子单元包括:偏差系数计算模块和矫正模块;
19、所述偏差系数计算模块用于以疑似鸡蛋边缘上每个像素点为中心点,计算中心点与两侧像素点的坐标偏差系数;
20、所述矫正模块用于在坐标偏差系数大于偏差阈值时,识别该中心点为异常像素点,对异常像素点坐标进行矫正处理,得到矫正处理后的疑似鸡蛋边缘。
21、进一步地,所述计算中心点与两侧像素点的坐标偏差系数的公式为:,,,其中,γ为中心点与两侧像素点的坐标偏差系数,xo为中心点的横坐标,yo为中心点的纵坐标,xr,i为中心点右侧邻域第i个像素点的横坐标,yr,i为中心点右侧邻域第i个像素点的纵坐标,xl,i为中心点左侧邻域第i个像素点的横坐标,yl,i为中心点左侧邻域第i个像素点的纵坐标,i为正整数,dr,i为第i个右侧距离,dl,i为第i个左侧距离,n为像素点的数量。
22、进一步地,所述对异常像素点坐标进行矫正处理的公式为:,,其中,为矫正处理后异常像素点的横坐标,为矫正处理后异常像素点的纵坐标。
23、进一步地,所述边缘特征提取子单元包括:位置波动值计算模块和特征向量构建模块;
24、所述位置波动值计算模块用于将矫正处理后的疑似鸡蛋边缘分成多段,在每段疑似鸡蛋边缘上计算位置波动值;
25、所述特征向量构建模块用于将各个位置波动值构成边缘特征向量。
26、进一步地,所述计算位置波动值为:,,其中,h为位置波动值,dj为每段疑似鸡蛋边缘上第j个像素点的距离,xj为每段疑似鸡蛋边缘上第j个像素点的横坐标,yj为每段疑似鸡蛋边缘上第j个像素点的纵坐标,m为每段疑似鸡蛋边缘上像素点的数量,j为正整数。
27、进一步地,所述计算边缘相似系数的公式为:,其中,θ为边缘相似系数,hn为边缘特征向量中第n个位置波动值,hn为对比特征向量中第n个元素,n为正整数。
28、一种基于智能视觉的鸡蛋计数器的计数方法,包括以下步骤:
29、s1、采集待计数区域的图像,得到初始图像;
30、s2、将初始图像拆分为r通道图像、g通道图像和b通道图像;
31、s3、根据r通道图像、g通道图像和b通道图像提取各个疑似区域;
32、s4、提取每个疑似区域的边缘像素点,得到疑似鸡蛋边缘;
33、s5、根据疑似鸡蛋边缘上各个像素点的位置分布,识别每个疑似区域是否为鸡蛋区域,根据鸡蛋区域的数量,得到鸡蛋数量。
34、综上,本发明的有益效果为:本发明采集待计数区域的图像,得到初始图像,初始图像拆分为r通道图像、g通道图像和b通道图像,实现从三种颜色通道上找到各个疑似区域,提高提取各个疑似区域的精度,提取每个疑似区域的边缘像素点,得到疑似鸡蛋边缘,通过疑似鸡蛋边缘上的边缘特征向量表征边缘结构,识别每个疑似区域是否为鸡蛋区域,根据鸡蛋区域的数量,得到鸡蛋数量,本发明抛弃存在大量卷积运算和池化运算的目标识别算法,通过颜色和边缘结构进行鸡蛋的识别,减少运算量,提高计数精度。
技术特征:
1.一种基于智能视觉的鸡蛋计数器,其特征在于,包括:图像采集单元、拆分单元、疑似区域提取单元、疑似鸡蛋边缘提取单元和计数单元;
2.根据权利要求1所述的基于智能视觉的鸡蛋计数器,其特征在于,所述疑似区域提取单元包括:第一相似度计算子单元、第二相似度计算子单元、第三相似度计算子单元、疑似像素点识别子单元和分区子单元;
3.根据权利要求1所述的基于智能视觉的鸡蛋计数器,其特征在于,所述计数单元包括:矫正处理子单元、边缘特征提取子单元和识别子单元;
4.根据权利要求3所述的基于智能视觉的鸡蛋计数器,其特征在于,所述矫正处理子单元包括:偏差系数计算模块和矫正模块;
5.根据权利要求4所述的基于智能视觉的鸡蛋计数器,其特征在于,所述计算中心点与两侧像素点的坐标偏差系数的公式为:,,,其中,γ为中心点与两侧像素点的坐标偏差系数,xo为中心点的横坐标,yo为中心点的纵坐标,xr,i为中心点右侧邻域第i个像素点的横坐标,yr,i为中心点右侧邻域第i个像素点的纵坐标,xl,i为中心点左侧邻域第i个像素点的横坐标,yl,i为中心点左侧邻域第i个像素点的纵坐标,i为正整数,dr,i为第i个右侧距离,dl,i为第i个左侧距离,n为像素点的数量。
6.根据权利要求5所述的基于智能视觉的鸡蛋计数器,其特征在于,所述对异常像素点坐标进行矫正处理的公式为:,,其中,为矫正处理后异常像素点的横坐标,为矫正处理后异常像素点的纵坐标。
7.根据权利要求3所述的基于智能视觉的鸡蛋计数器,其特征在于,所述边缘特征提取子单元包括:位置波动值计算模块和特征向量构建模块;
8.根据权利要求7所述的基于智能视觉的鸡蛋计数器,其特征在于,所述计算位置波动值为:,,其中,h为位置波动值,dj为每段疑似鸡蛋边缘上第j个像素点的距离,xj为每段疑似鸡蛋边缘上第j个像素点的横坐标,yj为每段疑似鸡蛋边缘上第j个像素点的纵坐标,m为每段疑似鸡蛋边缘上像素点的数量,j为正整数。
9.根据权利要求3所述的基于智能视觉的鸡蛋计数器,其特征在于,所述计算边缘相似系数的公式为:,其中,θ为边缘相似系数,hn为边缘特征向量中第n个位置波动值,hn为对比特征向量中第n个元素,n为正整数。
10.一种基于智能视觉的鸡蛋计数器的计数方法,基于权利要求1~9任一项所述的基于智能视觉的鸡蛋计数器实现,其特征在于,包括以下步骤:
技术总结
本发明公开了一种基于智能视觉的鸡蛋计数器及计数方法,属于图像处理技术领域,本发明采集待计数区域的图像,得到初始图像,初始图像拆分为R通道图像、G通道图像和B通道图像,实现从三种颜色通道上找到各个疑似区域,提高提取各个疑似区域的精度,提取每个疑似区域的边缘像素点,得到疑似鸡蛋边缘,通过疑似鸡蛋边缘上的边缘特征向量表征边缘结构,识别每个疑似区域是否为鸡蛋区域,根据鸡蛋区域的数量,得到鸡蛋数量,本发明抛弃存在大量卷积运算和池化运算的目标识别算法,通过颜色和边缘结构进行鸡蛋的识别,减少运算量,提高计数精度。
技术研发人员:杨波,杨涛,齐红涛
受保护的技术使用者:青岛海兴智能装备有限公司
技术研发日:
技术公布日:2024/8/13
- 还没有人留言评论。精彩留言会获得点赞!