一种基于随机森林的多传感器航迹关联方法、电子设备与流程
本发明涉及信息处理领域,特别涉及一种基于随机森林的多传感器航迹关联方法、电子设备。
背景技术:
1、组网雷达是对空中目标探测的有效手段之一,不同雷达的探测区域有重叠,需要通过航迹关联技术,判断各雷达上报的航迹是否属于同一个目标,从而便于后续的多雷达航迹融合处理,提高融合精度。
2、由于在实际应用中各雷达的测距和测角存在系统误差,使得量测的航迹易发生平移、旋转,导致量测的航迹偏离目标真实航迹,这使得传统关联算法如最邻近法、联合概率密度法等性能降低。同时,现有的传统关联算法对于航迹点时序关系要求严格,关联之前还需进行多雷达航迹点时间对齐处理,处理过程复杂。
技术实现思路
1、针对上述问题,本发明提出一种基于随机森林的多传感器航迹关联算法,利用机器学习中的分类器,将航迹关联问题转为多航迹点分类识别问题,通过对已有航迹样本的学习,得到航迹分类模型,对于未知航迹进行多航迹点分类判别,综合多点分类结果,形成可信的航迹关联结果。由于随机森林采用了多棵决策树通过逻辑判断的方式完成分类识别,因此受航迹测量误差的干扰较小,且与航迹点时序无关,数据预处理过程简单,只需利用同时间段内航迹点的位置、速度、航向等要素即可完成航迹分类,从而有效解决传统关联方法面临的问题,提高航迹关联正确率。
2、本发明目的在于提供一种基于随机森林的多传感器航迹关联方法,将航迹关联问题转为多航迹点分类识别问题,通过对已有航迹样本的学习,建立航迹分类模型,对于未知航迹进行多航迹点分类判别,进而形成可信的航迹关联结果。本发明与航迹点时序无关,只需要利用航迹点的位置、速度、航向等特征即可完成航迹分类和关联,从而有效解决传统关联方法面临的数据预处理复杂、受测量误差影响大等问题。
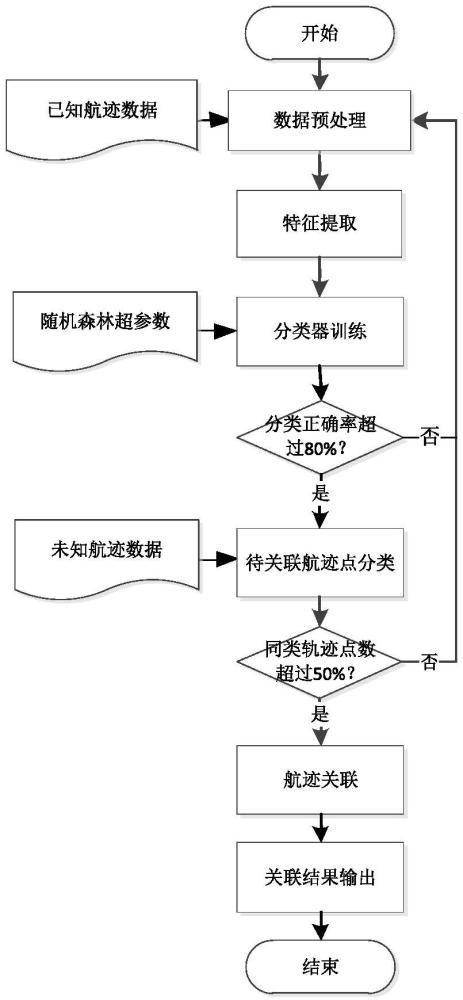
3、一种基于随机森林的多传感器航迹关联方法,包括以下步骤:
4、s1:读取雷达a上报的多条航线的航迹信息,并进行预处理,得到样本数据;
5、s2:为每条航线设置一个航迹批号,并为每条航线的每个航迹点,提取特征向量,具体表示为:
6、
7、其中,θ为航迹批号,表示航迹批号为θ的航线的第i个航迹点的特征向量;
8、表示航迹批号为θ的航线的第i个航迹点的经度;
9、表示航迹批号为θ的航线的第i个航迹点的纬度;
10、表示航迹批号为θ的航线的第i个航迹点的高度;
11、表示航迹批号为θ的航线的第i个航迹点的速度;
12、表示航迹批号为θ的航线的第i个航迹点的航向;
13、s3:建立随机森林分类器,将每条航线的所有航迹点的特征向量作为输入变量,对应的航迹批号作为标签,形成训练样本,将训练样本分成两部分,分别作为训练数据与测试数据,使用训练数据对随机森林分类器进行训练,得到训练完毕的分类模型;
14、s4:使用测试数据,对训练完毕的分类模型进行测试,如果正确率高于80%,则进入步骤s5,否则返回步骤s1,继续读取雷达a上报的数据,扩大样本数据的规模;
15、s5:读取雷达b上报的待关联一条航线的一批待关联航迹点,并提取每个待关联航迹点的特征向量,每个待关联航迹点的特征向量包括经度、纬度、高度、速度、航向;
16、将每个待关联航迹点的特征向量输入训练完毕的分类模型,得到每个待关联航迹点被分类的航迹批号;
17、s6:如果有50%以上的待关联航迹点被分类的航迹批号相同,则视为有效,进入步骤s7,否则返回步骤s1,继续读取雷达a上报的数据,扩大样本数据的规模;
18、s7:将一个批次的待关联航迹点被分类最多的航迹批号,作为对应批次待关联航迹点的关联结果。
19、优选的,所述预处理包括异常点去除、空值点估计。
20、优选的,异常点去除的方法具体为:
21、如果某条航线的第i个航迹点的速度vi,不满足以下条件,则认为对应航线的第i个航迹点为异常点,需要去除:
22、vmin≤|vi-vi-1|≤vmax,(i=2,3,......,n)
23、其中,n表示对应航线的航迹点总数,vmin表示空中目标最小速度门限,vmax表示空中目标最大速度门限。
24、优选的,空值点估计的方法具体为:
25、如果某条航线的第i个航迹点的特征量ri为空值,特征量为经度、纬度、高度、速度、航向中的任意一个;此时ri的值设置为:
26、
27、其中,n表示对应航线的航迹点总数,n为预设参数,取值范围为1到5。
28、优选的,随机森林分类器的决策树数量为20,训练数据占训练样本的比例为80%。
29、本发明还提供一种电子设备,
30、包括:
31、存储器,用于存放计算机程序;
32、处理器,用于执行存储器上所存放的程序时,实现上述的方法步骤。
33、有益效果:
34、1、创新性的提出采用机器学习的方法实现多雷达航迹关联,将航迹关联问题转为多航迹点分类识别问题,设计形成处理流程,并基于实测数据完成方法验证,有效解决传统关联方法受测量误差影响大的问题,提高多雷达航迹关联正确率;
35、2、利用随机森林分类器,通过对己有航迹样本的学习,得到航迹分类模型,对于未知航迹进行多航迹点分类判别,综合多点分类结果,形成可信的航迹关联结果;
36、3、采用的基于随机森林的航迹关联方法受测量误差的干扰小,且与航迹点时序无关,只需要利用航迹点的位置、速度、航向等特征即可完成航迹分类,操作简单,通用性强。
技术特征:
1.一种基于随机森林的多传感器航迹关联方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于随机森林的多传感器航迹关联方法,其特征在于,所述预处理包括异常点去除、空值点估计。
3.根据权利要求2所述的一种基于随机森林的多传感器航迹关联方法,其特征在于,异常点去除的方法具体为:
4.根据权利要求2所述的一种基于随机森林的多传感器航迹关联方法,其特征在于,空值点估计的方法具体为:
5.根据权利要求1所述的一种基于随机森林的多传感器航迹关联方法,其特征在于,随机森林分类器的决策树数量为20,训练数据占训练样本的比例为80%。
6.一种电子设备,其特征在于,
技术总结
本发明涉及信息处理领域,特别涉及一种基于随机森林的多传感器航迹关联方法、电子设备。方法利用机器学习中的分类器,将航迹关联问题转为多航迹点分类识别问题,通过对已有航迹样本的学习,得到航迹分类模型,对于未知航迹进行多航迹点分类判别,综合多点分类结果,形成可信的航迹关联结果。由于随机森林采用了多棵决策树通过逻辑判断的方式完成分类识别,因此受航迹测量误差的干扰较小,且与航迹点时序无关,数据预处理过程简单,只需利用同时间段内航迹点的位置、速度、航向等要素即可完成航迹分类,从而有效解决传统关联方法面临的问题,提高航迹关联正确率。
技术研发人员:刘林,陆小科,江涛,魏耀,钟巍
受保护的技术使用者:中国电子科技集团公司第十四研究所
技术研发日:
技术公布日:2024/11/4
- 还没有人留言评论。精彩留言会获得点赞!